Chan-Kalman算法在井下定位中的应用研究
2023-03-26 12:16王开松张亮徐记顺许欢
景德镇学院学报 2023年6期
王开松 张亮 徐记顺 许欢


摘 要:针对井下环境存在的非视距误差而导致超宽带定位技术精度降低的问题,对可抑制定位误差的ChanKalman算法进行了研究。该算法基于TOA定位模型,通过Chan算法对标签位置坐标进行初步解算,再采用卡尔曼滤波算法对初步解算结果进行优化,最终得出较为精确的标签位置坐标。实验结果表明,该算法明显提高了超宽带定位系统的定位精度。
关键词:井下定位;超宽带;Chan算法;卡尔曼滤波
中图分类号:TD655 文献标识码:A 文章编号:20959699(2023)06000105
井下辅助运输是用工量最大的井下作业环节。如果能实时、精准地对井下人员及物资进行定位,并依据定位信息制定出相应的调度方案,就可以实现辅助运输环节的减人增效、安全智能。GPS作为成熟的卫星定位技术适合应用于露天煤矿场景的定位[1]。然而,井下巷道内场景不同于露天煤矿场景,井下巷道内的定位设备难以接收到卫星发射的信号,因此GPS不适用于井下巷道的定位。适用于井下巷道定位的技术有超宽带(Ultra Wide Band,UWB)定位、射频识别(Radio Frequency Identification,RFID)定位、无线(Wireless Fidelity,WiFi)定位、紫蜂(ZigBee)定位以及蓝牙(Bluetooth)定位等[2]。UWB定位技术相比于其他同类型技术具有功耗低、准确度高以及覆盖范围广等优点,因此更适用于煤矿井下的高精度定位。由于井下定位环境复杂且存在运输设备及综采设备等对定位信号的遮挡,因此UWB系统在定位过程中容易产生非视距(NonLine of Sight,NLOS)误差。针对如何减少NLOS误差,朱代先等[3]采用粒子滤波算法对测距算法解算的数据进行修正,减少了NLOS误差对定位精度的影响。陆音等[4]对Chan算法进行了改进,使Chan算法在NLOS环境下的定位性能得到优化。杨会等[5]采用卡尔曼(Kalman)滤波算法对TOF测距算法进行改进,抑制了NLOS对定位结果的影响。仲江涛等[6] 基于Chan 算法并结合Kalman滤波思想,提出一种ChanKalman定位算法,减少了NLOS环境下的定位误差。本文基于UWB定位技术,在到达时间(Time Of Arrival,TOA)UWB 定位模型的基础上,对ChanKalman定位算法在井下定位的应用展开研究。该算法运用Kalman滤波算法对Chan算法进行优化,以减小NLOS误差的影响,从而提高井下定位系统的定位精度。
1 井下定位系统概述
1.1 UWB井下定位系统
煤矿井下UWB定位系统主要由标签、定位基站、交换机、上位机、工业以太网等构成[7],如图1所示。
在 井下定位系统对标签进行实时定位的过程中,基站的位置是固定的,标签在移动的过程中向基站发送定位信号。基站在接收到标签的定位信号后,按TOA 测距方式完成对标签的测距,并通过以太网将测距数据传输给交换机。位于井上的上位机通过交换机获取标签的测距数据,在获取到测距数据后,结合已知的基站位置坐标,通过ChanKalman定位算法解算出标签在移动过程中的实时位置坐标。
1.2 井下定位干扰来源分析
井下巷道环境比较特殊,具体体现在空间封闭且狭长,空气湿度高且含有大量的粉尘,运输设备和综采设备较多。因此UWB信号在标签与基站间的交互过程中,极易受到井下定位环境的干扰,进而对定位系统精度产生影响。
具体而言,井下煤矿开采过程中会产生大量粉尘,为了保障井下巷道环境的清洁以及防爆安全性,常采取喷雾的方式对巷道环境进行降尘处理。粉尘和水汽混合而成的颗粒悬浮在巷道的空气中,使得巷道环境中的UWB信号在信号交互过程中出现折射、反射等情况。煤矿井下运输设备、综采设备也会对UWB信号的交互产生遮挡。粉尘及井下设备等因素对UWB信号的干扰都会导致信号在基站与标签间的交互方式不再是直线交互,造成了NLOS误差的产生以及UWB信号传输时间的延长,导致按TOA测距法测得的距离失真,进而对上位机解算的标签位置结果产生影响。
2 定位模型和定位算法
2.1 TOA 定位模型
TOA 定位模型的原理是用三个参考基站的位置坐标来确定标签的位置坐标。如图2所示,在二维平面内,布置有三个参考基站A1、A2、A3,各参考基站的位置坐标已知,且对应的位置坐标分别为(x1,y 1)、(x2,y 2)、(x3,y 3)。T为标签,其位置坐标未知,坐标假设为(x、y)。标签到三个参考基站的对应距离分别为d1、d2、d3。分别以三个参考基站的位置为圆心,标签到参考基站的距离为半径绘制三个圆,则三圆的交点即为标签的位置。在实际定位过程中,为了提高定位精度、扩展UWB信号覆盖范围以及减少NLOS误差,在井下定位中,参考基站布置的数量往往超过3个。
3 结果分析
3.1 实验平台搭建
为了验证ChanKalman算法的可行性,选取封闭的实验室环境来模拟井下环境,搭建了一个由四个基站和一个标签构成的定位系统。基站与标签的定位模块均为DW1000(型号:DDWMPGPLUS)。
如圖3所示,a代表基站0,其坐标为(0,0);b代表基站1,其坐标为(600,0);c代表基站2,其坐标为(600,600);d代表基站3,其坐标为(0,600);T代表标签。主基站为基站0,通过数据线与上位机连接,完成定位数据的传输。标签下端固定在小车上,小车带动标签在定位区域内运动。
3.2 静态实验
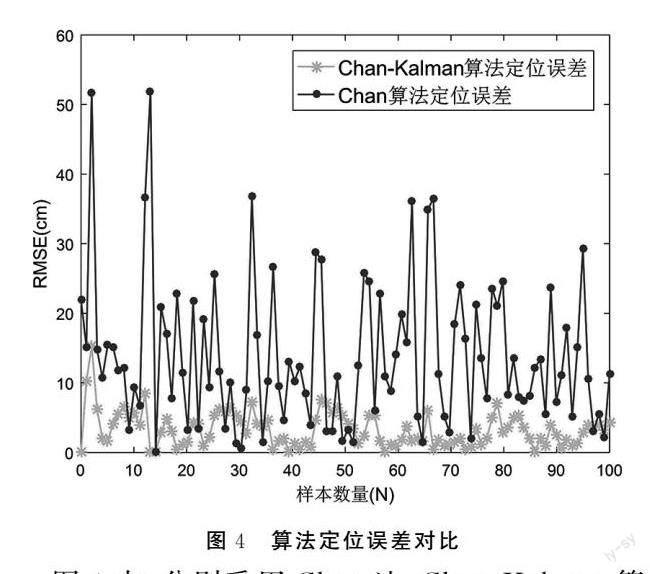
将标签固定在坐标(300,200)处。以定位系统测量得到的标签到四个基站的距离数据为原始数据,绘制如图4所示的算法误差曲线对比图。
图4中,分别采用Chan法、ChanKalman算法对原始距离数据进行解算,依据算法得到的定位结果,计算标签由算法解算出的位置与实际位置的均方根误差(Root Mean Square Error,RMSE)。由RMSE曲线可以看出Chan定位算法解算得出的位置数据总体误差较大,而采用ChanKalman算法解算出的位置数据总体误差较小,绝大部分误差在15cm 以下。从而验证了ChanKalman算法能够提高UWB定位系统的精度。
3.3 动态实验
将标签的初始点定在(0,300),终点定在(600,300)。小车搭载着标签并沿直线从初始点匀速运动到终点。由Chan算法和ChanKalman算法得出的标签定位轨迹如图5所示。
从图5 中可以看出当定位环境相对复杂时,Chan算法的定位效果差,解算得到的运动轨迹与真实运动轨迹的偏离度较大,甚至有些定位点出现了严重偏差的情况。而ChanKalman算法的定位效果较好,得出的运动轨迹与实际运动轨迹更贴合。
3.4 ChanKalman算法精度测试
在搭建的实验环境中,将标签布置在不同的位置。在标签所处的每一个位置上,算法执行多次,得到算法解算出的定位结果、距离误差和RMSE,如表1所示。
通过对ChanKalman算法的测试可知,在模拟实验环境下,ChanKalman算法得到的定位距离误差、RMSE均在15 cm 以内,可以达到井下高精度定位标准,也验证了静态定位实验的正确性。
4 结语
文章为了进一步提高UWB定位系統的定位精度,对ChanKalman算法进行了研究。在TOA 定位法的基础上,采用Chan算法求解非线性方程组,在得出解算结果后,运用Kalman滤波算法对解算结果进行优化,求解出标签位置坐标的最优解。搭建了UWB定位系统,并通过UWB定位系统对定位算法进行了对比实验验证。从实验结果可以看出:相比于Chan算法,ChanKalman算法对UWB定位系统定位精度的提高更明显。
参考文献:
[1]张洪利.GPS在露天煤矿智能化系统中的应用[J].电子技术,2022,51(12):118120.
[2]邓中亮,尹露,唐诗浩,等.室内定位关键技术综述[J].导航定位与授时,2018,5(3):1423.
[3]朱代先,孙小婷,郭明香,等.矿山井下超宽带无线定位算法研究[J].西安科技大学学报,2020,40(2):356362.
[4]陆音,王宝全,丘觐玮.CHAN 算法在LOS和NLOS环境下的定位研究[J].计算机技术与发展,2015(9):6165.
[5]杨会,沈微微,李传辉,等.基于卡尔曼滤波的UWB室内定位技术研究[J].物联网技术,2023,13(1):4650.
[6]仲江涛,秦斌,吴健春,等.基于Kalman滤波的Chan室内定位算法改进[J].通信技术,2017,50(10):22232228.
[7]张海军,孙学成,赵小虎,等.煤矿井下UWB人员定位系统研究[J].工矿自动化,2022,48(2):2934.
[8]范强,张涵,隋心.UWB TWTOA 测距误差分析与削弱[J].测绘通报,2017(9):1922,50.
[9]贾骏超.超宽带室内定位中NLOS误差抑制方法探讨[J].导航定位学报,2017,5(2):6064.
责任编辑:肖祖铭
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
测控技术(2018年12期)2018-11-25
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年9期)2017-12-18
雷达学报(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07
电源技术(2016年9期)2016-02-27
东北电力大学学报(2015年1期)2015-11-13
电源技术(2015年1期)2015-08-22
电测与仪表(2015年24期)2015-04-09