基于探地雷达的隧道衬砌空洞检测方法
2024-04-03 07:28张永恒徐海泽王耀东朱力强曹源苏广思
铁道建筑 2024年2期
张永恒 徐海泽 王耀东 朱力强 曹源 苏广思
1.中南大学 交通运输工程学院, 长沙 410083; 2.北京交通大学 载运工具先进制造与测控技术教育部重点实验室, 北京 100044;3.中国铁路郑州局集团有限公司, 郑州 450052; 4.中国神华能源股份有限公司, 北京 100011
隧道工程是我国基础工程中重要的组成部分。随着时间推移,既有隧道衬砌结构会出现诸多病害。为保证工程安全,需要定期检测[1]。
传统隧道衬砌病害检测方法是先通过探地雷达采集图像,再由专业检测人员对图像进行人工解译。随着我国隧道数量的快速增加,隧道衬砌病害检测工作量也大幅增加。随着机器视觉技术和图像处理技术的发展,隧道衬砌病害检测方法也在不断拓展。
早期的隧道衬砌病害检测、分析多采用数字信号处理方法。廖红建等[2]基于有限差分法对高速铁路无砟轨道不同填充模型进行正演模拟。蔡一超等[3]在云南某高速公路隧道工程中采用地质雷达进行衬砌质量检测。朱兆荣等[4]采用模型、现场试验相结合的方法,对探地雷达检测隧道衬砌空洞效果进行对比。
随着深度学习和卷积神经网络技术的发展,图像识别技术也有所提升。方涛涛等[5]利用YOLOv8n作为基础检测网络,在传统目标检测任务的基础上添加定位任务,以此来实现识别、定位管线的功能。王建锋等[6]提出将图像处理和深度学习相结合的衬砌裂缝检测方法。Kaur等[7]提出一种用于自动检测钢筋的算法,集成图像梯度特征和钢筋双曲线特征,通过拟合曲线来实现检测功能。马王鹏等[8]在TensorFlow框架下利用YOLO神经网络模型,对雷达图像中的异常目标进行识别、解释。冯德山等[9]将深度学习中Faster R-CNN、YOLOv3两种目标检测算法运用到探地雷达图像识别中,分析两种算法在实测数据集上的表现。Liu等[10]提出一种基于深度学习和迁移的自动检测定位方法,通过目标算法来判断钢筋具体位置。张东昊等[11]利用Mask R-CNN深度学习框架和ResNet101卷积神经网络提取雷达图像特征,检测隧道衬砌中的钢拱架和脱空。传统的雷达检测方法只能依靠人工解释雷达图像,耗时长且效率低。深度学习算法比传统方法好、智能化程度高。
本文将深度学习和探地雷达相结合,提出一种隧道衬砌空洞检测方法。将雷达图像进行处理,提取可描述的部分建立仿真雷达图像数据集,再基于YOLOv5目标检测模型对病害进行智能识别和检测。
1 图像处理与深度学习
1.1 隧道衬砌病害识别流程
通过探地雷达对隧道衬砌进行采样,经过信号处理后形成直观的雷达图像。结合雷达图像和GPRMax软件的仿真图像,建立隧道衬砌图像数据集。设计图像目标检测算法,利用深度卷积神经网络技术对图像进行智能检测。通过图像智能检测算法和网络性能评估,验证算法和网络结构的有效性。隧道衬砌病害识别流程如图1所示。
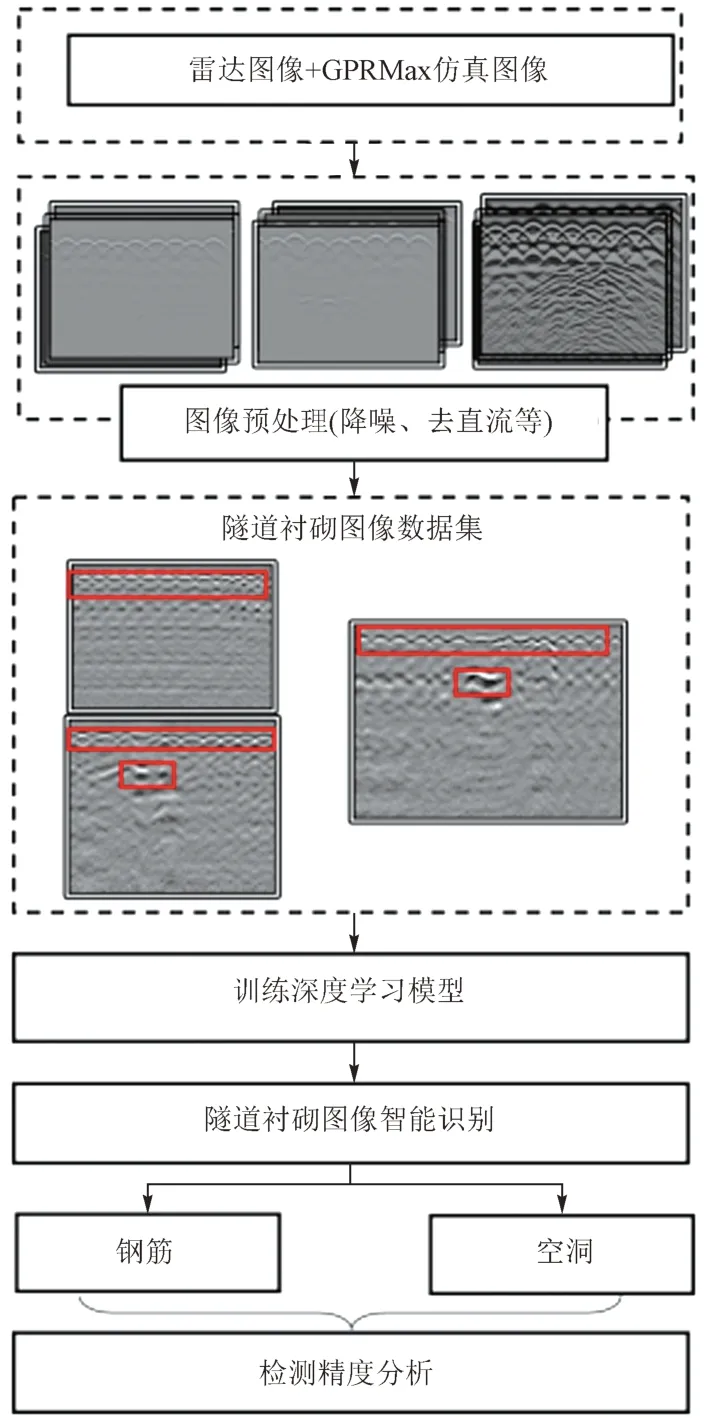
图1 隧道衬砌病害识别流程
1.2 深度卷积神经网络技术
因为隧道衬砌雷达图像中不同目标形状差异较大,图像识别时需要较高感受野来获得目标的全部特征。采用YOLOv5目标检测模型,针对衬砌图像的目标特征建立数据集,选取特征提取器并引入特征融合模块,对数据集进行训练和测试。
1)特征提取器:采用CSPDarknet53结构作为隧道衬砌雷达图像的特征提取器,通过3 × 3的卷积核来实现采样。在保证检测精度的基础上,通过提升卷积神经网络提取特征的能力来提高检测速度。
2)特征融合模块:不同图像尺寸容易导致特征失真,采用spp BottleNeck模块将特征提取器提取的图像全局特征和局部特征进行融合。借鉴空间金字塔思想,将特征图分别进行5 × 5、9 × 9、13 × 13分块,提取每一个子图里最大的原始特征值,再将这些特征值融合以增大网络感受野。
2 建立数据集和病害识别测试
2.1 衬砌病害仿真模拟
由于探地雷达采集的衬砌病害图像不全,通过GPRMax仿真软件对衬砌病害进行二维正演模拟[12]。
模型尺寸为3.0 m(宽) × 1.8 m(高),网格尺寸为5 mm。钢筋的直径、间距、保护层厚度分别为2.2、25.0、10.0 cm。在混凝土内部设置空洞,最下层设置围岩。混凝土、空洞内的空气、围岩仿真参数见表1。
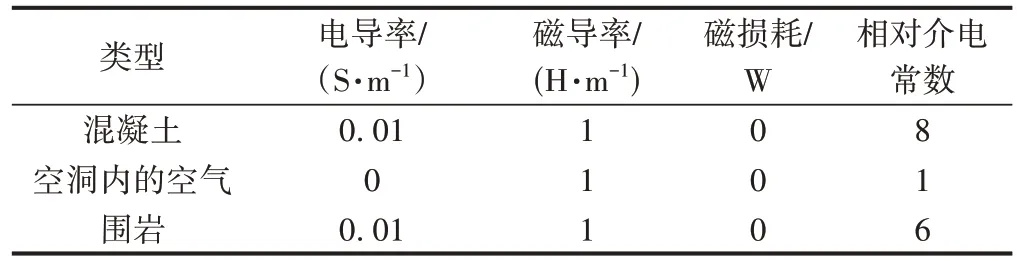
表1 仿真参数
正演模拟时,采用中心频率为900 MHz的雷克子波作为激励波。发射、接收天线间隔为5 cm,步长0.01 m,计算步长280,计算时长6 ns,接收时窗30 ns。
通过软件建立的衬砌空洞模型见图2(a),正演处理结果见图2(b)。可知,采用的雷克子波不仅可以很好地识别出钢筋,还可以识别出空洞。
为了丰富图像数据集,对衬砌浸水、含水空洞模型也进行了模拟。水、湿混凝土的介电常数分别为81、20 F/m。模型及正演结果见图3。
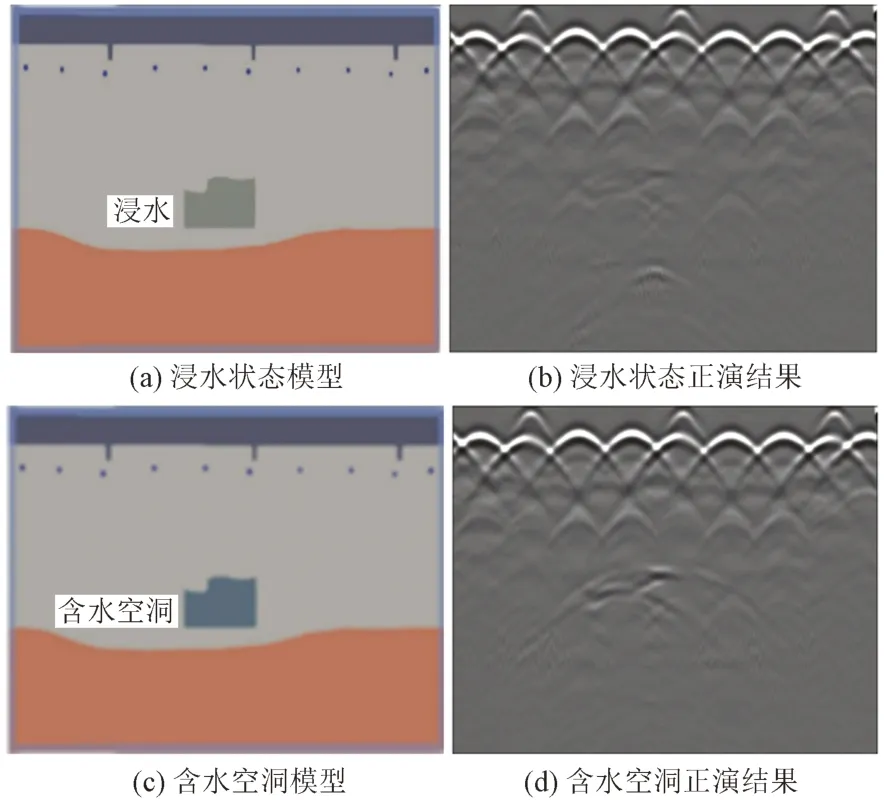
图3 衬砌浸水、含水空洞模型和正演结果
2.2 数据集建立和病害识别
在得到正演结果后,将结果进行分类并利用Labelimg软件进行标注,标签分为kongdong(空洞)、gang jin(钢筋)两种。
为了便于标注和提高标注精度,将图像分辨率设为560 × 420。数据集样本总数为2 500张,按照7∶3的比例分成训练集和测试集,分别用于网络训练、测试。
2.3 测试结果
部分测试结果见图4。可知,网络模型没有检测出具有连续小双曲线特征的gang jin目标,并且部分kongdong目标也没有被检测出来。
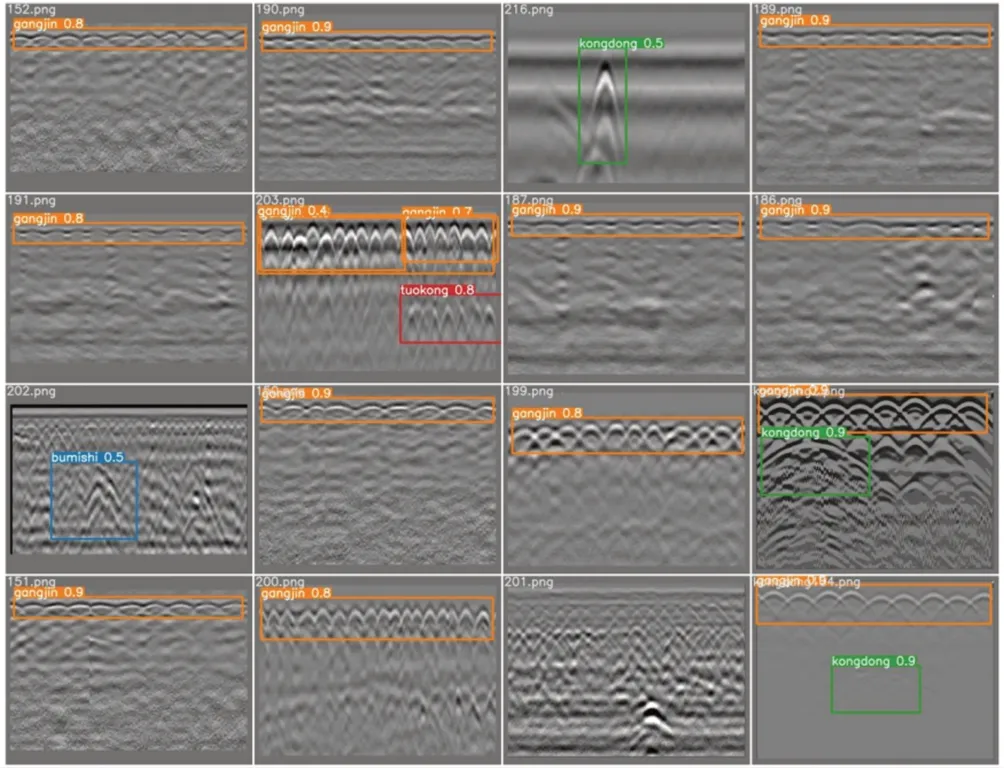
图4 部分测试结果
对数据集中人工标注框的钢筋尺寸、数量分析,发现钢筋长宽比例超过了预设Anchor(预测目标检测时的参考框)长宽比例,导致检测精度不高。为了解决这一问题,利用K-means聚类算法[13]聚类出适合隧道衬砌雷达图像数据集的Anchor尺寸并再次进行网络训练。
调整参数后的测试结果见图5。可知,网络对钢筋识别的置信度达到80%以上,还可以检测出一些并不明显的空洞。
图5 调整参数后的测试结果
3 检测方法的应用
为了验证本文方法的可靠性,在南方某地铁隧道区间进行检测。
采集了1 km的衬砌雷达图像,将图像进行零点校正、降噪等预处理后,先由技术人员辨认出含有空洞的雷达图像并用红色方框标记,见图6。
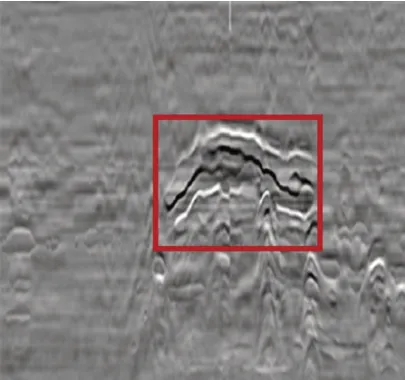
图6 技术人员识别的空洞
采用本文检测方法对图像进行智能识别,对应的结果见图7。经对比发现,采用本文检测方法检测出的空洞区域与技术人员辨认的基本一致,网络检测准确率达到了97.7%,精确率和召回率的调和平均值达到了0.783。可见,本文的检测方法能够准确识别衬砌空洞。
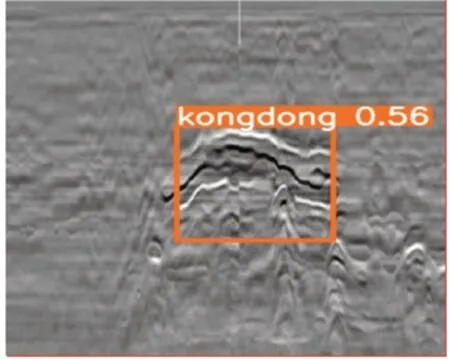
图7 采用本文检测方法识别的空洞
4 结语
本文提出一种将深度学习和探地雷达相结合的隧道衬砌空洞智能检测方法。通过雷达探测和仿真模拟,对隧道衬砌空洞以及渗漏水状况进行仿真,并建立隧道衬砌图像数据集。利用K-means聚类算法确保空洞检测的精度。
通过现场检测并将检测结果与人工辨别结果进行对比,证明本文检测方法可靠。下一步,对隧道衬砌的其他病害进行智能识别,丰富数据集,以获得更好的应用效果。
猜你喜欢
大自然探索(2023年7期)2023-08-15
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
小学生学习指导(低年级)(2018年12期)2018-12-29
通信电源技术(2018年3期)2018-06-26
故事作文·高年级(2017年2期)2017-03-01
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
新闻传播(2015年20期)2015-07-18
河南科技(2014年5期)2014-02-27