空间自适应的被动声源定位系统的设计
2024-05-03 18:35李博涵邵燕宁曹子君毛胜春王红理
物理与工程 2024年1期
关键词:自动控制
李博涵 邵燕宁 曹子君 毛胜春 王红理

摘 要 传统的声源定位技术分为时延估计和空间定位两步,本文将几种经典的时延估计和空间定位方法加以整合与改进,提高了系统的实时性与抗干扰能力,创新性地提出并实现了根据声源位置变化而自适应调整麦克风阵列形态的定位系统,在不降低实时性的同时,有效地降低了定位误差。本文从定位精度、实时性和抗干扰能力三个方面对系统性能进行评估,实验证明:理想条件下,该声音定位系统的不确定度在4cm 以内;对噪声和混响有较好的抵抗能力,在恶劣环境下不确定度不超过6cm;单次定位耗时0.5s,可以对运动声源或脉冲声源进行定位,有较强的实时性,可以适用于大部分应用场景。
关键词 声音定位;麦克风阵列;时延估计;自适应调节;自动控制
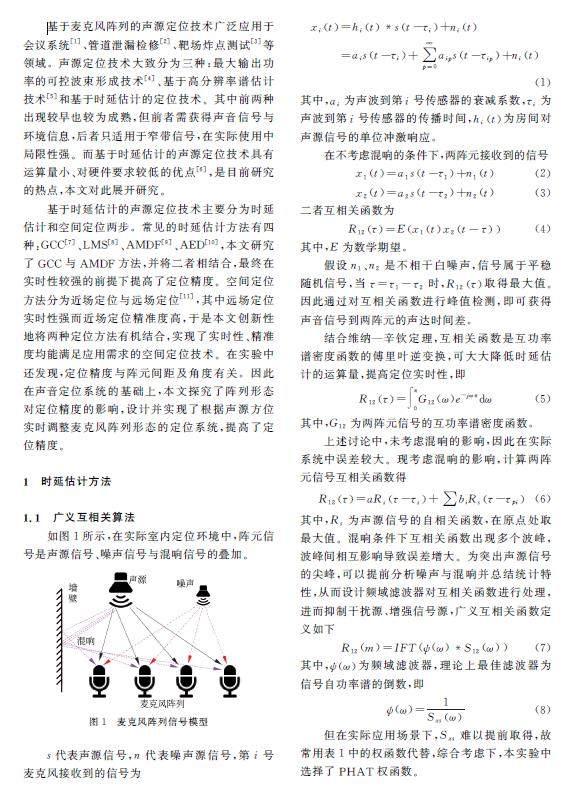
基于麦克风阵列的声源定位技术广泛应用于会议系统[1]、管道泄漏检修[2]、靶场炸点测试[3]等领域。声源定位技术大致分为三种:最大输出功率的可控波束形成技术[4]、基于高分辨率谱估计技术[5]和基于时延估计的定位技术。其中前两种出现较早也较为成熟,但前者需获得声音信号与环境信息,后者只适用于窄带信号,在实际使用中局限性强。而基于时延估计的声源定位技术具有运算量小、对硬件要求较低的优点[6],是目前研究的热点,本文对此展开研究。
基于时延估计的声源定位技术主要分为时延估计和空间定位两步。常见的时延估计方法有四种:GCC[7]、LMS[8]、AMDF[9]、AED[10],本文研究了GCC与AMDF方法,并将二者相结合,最终在实时性较强的前提下提高了定位精度。空间定位方法分为近场定位与远场定位[11],其中远场定位实时性强而近场定位精准度高,于是本文创新性地将两种定位方法有机结合,实现了实时性、精准度均能满足应用需求的空间定位技术。在实验中还发现,定位精度与阵元间距及角度有关。因此在声音定位系统的基础上,本文探究了阵列形态对定位精度的影响,设计并实现了根据声源方位实时调整麦克风阵列形态的定位系统,提高了定位精度。
1 时延估计方法
3.1 声源方位角对定位误差的影响
考虑实验装置的对称性,本文只在第一象限分析不确定度。其中,声源为距原点3 米的800Hz简谐波。对噪声和混响进行仿真,得出不同方向角的相对不确定度,如图9所示。
声源位于坐标轴附近时,定位精度最高;位于坐标轴平分线附近时精度最低。因此在进行一次粗略定位后转动整个装置,使坐标轴指向声源方向,之后进行二次精准定位,即可降低定位误差。
3.2 阵元间距对定位误差的影响
在3.1的条件下,考虑声源始终位于坐标轴上。以2cm 为步长,在5~29cm 范围内逐步改变传感器间距并计算不确定度,声源距原点距离始终为3米,信号频率为800Hz,相对不确定度与阵元间距关系见图10,可见最优间距在16cm 附近。
当阵元间距过小时,阵元间时延差过小增加时延估计难度,导致误差增大;当阵元间距过大时,定位系统处于近场条件,与2.1中的远场近似相矛盾,导致误差增大。阵元间距不宜过大或过小,故存在最优间距,且根据波的远场条件,预测最优间距与声源距离和信号频率有关。
本文改变声源位置和信号频率,利用仿真模拟,做出了最优间距关于声源距离与信号频率的关系,如图11所示。最佳间距正相关于声源距离,负相关与信号频率。
3.3 自适应调整系统的实现
在定位实验中,我们首先进行一次粗定位,得出声源的平均频率与大致方位。在此基础上与图9和图11中的数据进行对照,得出最优方向和最优间距,进而控制电机调整阵列方向与阵元间距并再次进行定位,最終降低定位误差。
在硬件上,我们利用舵机云台调整坐标架方向,利用电机滑轮结构调整阵元间距,利用单片机输出电机控制信号。软件上,我们利用PID 反馈控制算法[17],快速稳定地对阵列方向与阵元间距进行调整。系统运行流程如图12所示。
4 系统实现及性能评估
4.1 实验仪器
实验仪器分为信号采集装置和机械控制装置两部分,如图13所示。
信号采集装置包括:声音传感器、8通道级联示波器、直流稳压电源以及滤波电路。机械控制装置包括:3D 打印零件、滑块、导轨、电机及控制板。
装置整体是由3D 打印零件与导轨组成的三维直角坐标架与承载装置的实验板组成,长宽高均为65厘米。
坐标架分为六个半轴,各半轴由滑轮、导轨、装载声音传感器的滑块以及电机组成,半轴间利用3D打印零件连接。在位于水平面的四条半轴上,本系统利用电机、滑轮和弹性装置组成的传动结构控制传感器移动;在竖直方向的两条半轴上,则是利用电机、滑轮和配重控制传感器移动,最终实现了10~30cm 的阵元间距调整。另一方面,坐标架与实验板之间由一个大扭矩舵机连接,依此控制整个坐标架旋转,最终实现了360°的阵列方向调整。
4.2 定位精度实验
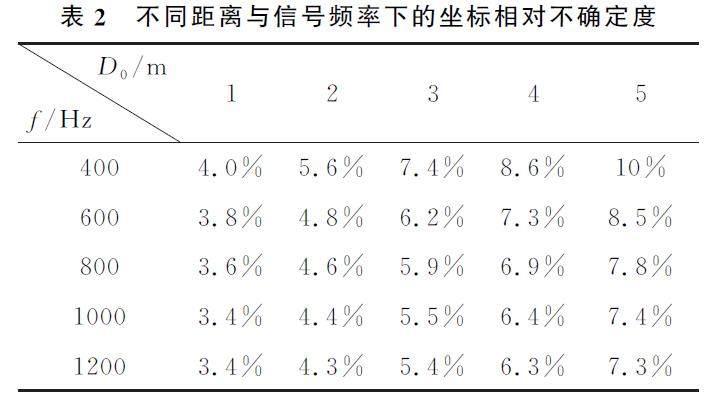
实验发现,定位精度主要与信号频率和声源距离有关:信号频率越高、声源越近,定位精度越高,其中声源距离对精度的影响更大一点,如表2所示。
对于生活中大部分声音信号(400~4000Hz),声源距离在1米以内时,定位误差在4%以内;声源距离在5米以内时,定位误差在10%以内;若进一步提高信号频率以及传感器间距,可以实现更远距离的高精度定位。本系统误差约为传统的静态GCC-十字阵定位系统的一半[18],考虑到声源本身有一定体积,本系统基本满足精度要求。
4.3 抗干扰实验
在声音定位实验中,主要的干扰源为噪声和混响[19]。噪声强度常用信噪比衡量,用SNR 表示,其定义如下
其中,Ps 为声源信号功率,Pn 为环境噪声功率(高保真音箱的信噪比达110dB以上)。混响强度常用混响时间衡量,指从声源停止发声的时刻起,到能量密度衰减60dB终止,一般用T60 表示(中小学教室的混响时间标准为0.5s~0.7s)。
取声源距离1米,信号频率400Hz,利用Moorer混响器和高斯噪声生成混响和噪声信号,实验数据如表3所示。
在恶劣的实际应用环境下,定位结果的相对误差不超过6%,可见系统具有较强的抗干扰能力。
另外,本系统基于MATLAB 计算,单次定位参考信号长度为0.1s,运算耗时约0.4s,有较强实时性,可以对运动声源和脉冲信号进行定位,若将程序移植至Python环境可进一步提高运算速度。
5 结语
本文对传统定位方法进行改进与整合,制作了静态的声音定位系统;并基于大量实验数据,制作了随声源运动而实时调整阵列形态的声源定位系统;并从定位精度、抗干扰能力、实时性三个方面对定位系统进行性能评估。实验结果显示:傍轴条件下声源定位精度较高,自适应调整系统有效地提高了定位精度;该声音定位系统定位在理想条件下有着较高的定位精度与实时性;同时对噪声和混响有较强的抗干扰能力,有着较广的应用前景。
参考文献
[1] 张泽.会议电视系统中自动定位原理及其实现[J].计算机光盘软件与应用,2014,17(17):290+292.
ZHANG Z. Automatic location principle and its implementationin video conference system[J]. Computer CD Softwareand Application,2014,17(17):290+292. (in Chinese)
[2] 鄭晓亮,廖冉,王强.埋地输气管道泄漏振动声源双阵列定位方法[J].油气储运,2023,3(28):1-14.
ZHENG X L, LIAO R, WANG Q. Double-array locationmethod for leakage vibration sound source of buried gastransmission pipelines[J]. Oil & Gas Storage and Transportation,2023,3(28):1-14. (in Chinese)
[3] 胥磊.多阵列融合的炸点声定位技术研究[D].西安:西安工业大学,2021.
[4] HAHN W, TRETTER S. Optimum processing for delayvectorestimation in passive signal arrays[J]. IEEE Transactionson Information Theory, 1973, 19(5): 608-614.
[5] WANG H, KAVEH M. Coherent signal-subspace processingfor the detection and estimation of angles of arrival ofmultiple wide-band sources[J]. IEEE Transactions on Acoustics,Speech and Signal Processing, 1985, 33(4): 823-831.
[6] 徐勤奇,杨鹏.基于正四面体阵列的声源定位算法及误差分析[J].计算机仿真,2013,30(7):296-299.
XU Q Q, YANG P. Sound source location algorithm anderror analysis based on tetrahedral array[J]. Computer Simulation,2013,30(07):296-299. (in Chinese)
[7] KNAPP C, CARTER G C. The generalized correlationmethod for estimation of time delay[J]. IEEE Transactionson Acoustics, Speech and Signal Processing, 1976, 24(4):320-327.
[8] REED F, FEINTUCH P L, BERSHAD N J. Time delayestimation using the LMS adaptive filter-static behavior[J].IEEE Transactions on Acoustics, Speech and Signal Processing,1981, 29(3): 561-571.
[9] ROSS M, SHAFFER H, COHEN A, et al. Average magnitudedifference function pitch extractor[J]. IEEE Transactionson Acoustics, Speech and Signal Processing, 1974,22(5): 353-362.
[10] BENESTY J. Adaptive eigenvalue decomposition algorithm forpassive acoustic source localization[J]. The Journal of the AcousticalSociety of America, 2000, 107(1): 384-391.
[11] 行鸿彦,杨旭,张金玉.基于四元传声器阵列的声源全方位定位算法[J].仪器仪表学报,2018,39(11):43-50.
XING H Z, YANG X, ZHANG J Y. Sound source omnidirectionallocation algorithm based on four-element microphonearray[J]. Chinese Journal of Scientific Instrument,2018,39(11): 43-50. (in Chinese)
[12] 李揚. 基于小型麦克风阵列的声源定位系统设计与实现[D].哈尔滨:哈尔滨工业大学,2014.
[13] 周婧洁,陈建平,吉晓东.几种数字混响器模型的比较与分析[J].南通大学学报(自然科学版),2010,9(2):23-28.
ZHOU J J, CHEN J P, JI X D. Comparison and analysisof several digital reverberator models[J]. Journal of NantongUniversity (Natural Science Edition), 2010, 9(2):23-28. (in Chinese)
[14] 陈晓辉,孙昊,张恒,等.基于声源阵列的空间麦克风定位方法研究[J].计算机应用研究,2020,37(5):1437-1439.
CHEN X H, SUN H, ZHANG H, et al. Research on spatialmicrophone location based on sound source array[J].Applied Research of Computer, 2019, 37(5): 1437-1439.(in Chinese)
[15] 张晓光,吕海峰,吕传茂,等.四元十字麦克风阵声源定位算法研究[J].中国测试,2020,46(2):96-102.
ZHANG X G, LV H F, LV C M, et al. Research onsound source location algorithm of four-element cross microphonearray[J]. China Test and Technology, 2019, 46(2):96-102. (in Chinese)
[16] SMITH J O, ABEL J S. The spherical interpolation methodof source localization[J]. IEEE Journal of Oceanic Engineering,1987, 12(1): 246-252.
[17] 王伟,张晶涛,柴天佑.PID 参数先进整定方法综述[J].自动化学报,2000(3):347-355.
WANG W, ZHANG J T, CHAI T Y. Summary of advancedtuning methods for PID parameters[J]. Acta AutomaticaSinica, 2000(3): 347-355. (in Chinese)
[18] 程方晓,刘璐,姚清华,等.基于改进时延估计的声源定位算法[J].吉林大学学报(理学版),2018,56(3):681-687.
CHANG F X, LIU L, YAO Q H, et al. Sound source locationalgorithm based on improved time delay estimation[J]. Journal of Jilin University (Science Edition), 2018,56(3): 681-687. (in Chinese)
[19] 李海鹏,孙大军,郑翠娥.强干扰环境下水声时延估计技术研究[J].电子与信息学报,2021,43(3):873-880.
LI H P, SUN D J, CHENG C E. Research on underwateracoustic time delay estimation under strong interference environment[J]. Journal of Electronics and InformationTechnology, 201, 43(3): 873-880. (in Chinese)
猜你喜欢
装备制造技术(2021年4期)2021-08-05
电子制作(2019年22期)2020-01-14
经济技术协作信息(2018年33期)2018-12-06
通信电源技术(2018年3期)2018-06-26
电子测试(2018年11期)2018-06-26
电子测试(2018年6期)2018-05-09
电子制作(2017年13期)2017-12-15
铁道通信信号(2016年12期)2016-06-01
海峡科技与产业(2016年3期)2016-05-17
中国教育技术装备(2015年4期)2015-03-01