基于单片机的船舶设备信号采集及处理系统
2007-01-28 08:05,
船海工程 2007年6期
,
(武汉理工大学 能源与动力工程学院,武汉 430063)
随着计算机技术的发展、船舶自动化程度的提高,船载仪表系统也由过去的机械仪表向电子式仪表(EFIS)发展。但现在还在使用期的早期建造的船舶大部分是采用模拟信号设备;有些设备虽然采用了数字信号,但也没有统一的标准。为提高这些早期船舶的自动化程度,需要解决模拟信号数字化以及信号标准统一的问题。国内开发了ZSZ系列自整角机/数字转换模块,ZSZ系列转换器是一种采用跟踪技术和模块化结构的自整角机/数字转换器,它采用二阶伺服回路,输出与TTL电平兼容的并行二进制码,与美国AD公司的ADC1700系列转换器完全兼容。
但是,这些接口只能采集转换一路信号或一种信号,并且输出信号的通讯格式不是标准的NMEA-0183格式信号(即ASCⅡ码)。据此,笔者选择船舶上应用比较广泛、比较重要的步进电机信号和自整角机信号作为对象,以AT89C51单片机为核心芯片,设计一款采集和处理这两种信号的多路转换接口。
1 硬件设计
系统硬件原理框图见图1。
由自整角机信号和步进信号的前置电路、8路采样和保持器、多路转换开关、12位AD574逐位直流到数字转换器、单片机AT89C52等组成多路信号采集与处理系统。自整角机、步进电机的信号经过各自前置处理电路后,送入单片机系统进行数据的实时处理,然后经串口向外输出符合NMEA-0183或者IEC-61162格式的标准信号。
1.1 自整角机信号处理
自整角机各路信号经同步采样保持后,由单片机89C51控制多路转换开关选择通道和启动AD574;信号经12位AD574逐位直流到数字转换器,转换成12位数字量。12位数据分两个8位送出,先送高8位,后送低4位。
自整角机信号处理由信号比较和信号整形两部分组成,对自整角同步发送机送出的模拟信号进行衰减、鉴零、鉴相、整形处理。信号处理部分最重要的是自整角机机械角到数字角的转换。
自整角机必须经过正余弦变压器,把输入的信号转换为正余弦旋转变压器输出方式,同时使输出的正弦和余弦电压限制在10 V左右[1]。目前多采用电子式正余弦变压器。图2为自整角机输入的正余弦变压器。
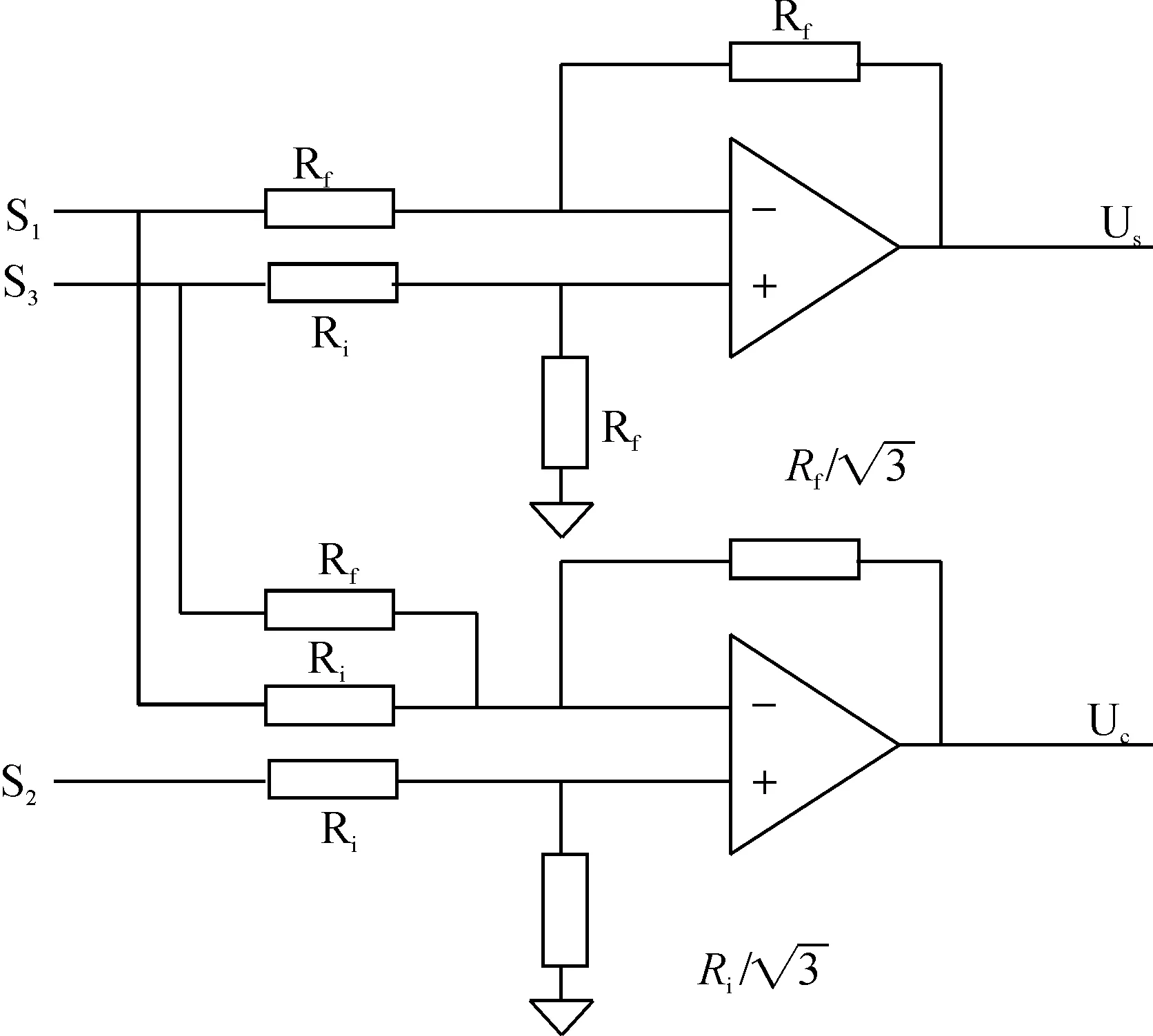
图2 正余弦信号生成电
电子式正余弦变压器的两路输出为:
(1)
(2)
式中:Us——正弦输出电压;
Uc——余弦输出电压;
Um——输入正弦、余弦绕组电压最大值;
ω——输出信号的载波频率,即激磁电压的角频率;
θ——转动的机械角度;
Ri——输入电阻;
Rf——反馈电阻;
K——比例系数。
正余弦变压器输出的信号是以模拟信号表示的机械轴角θ,在数字随动系统中,需要将机轴角θ转换成数字角φ。
由式(1)、(2)可以推出:
(3)
(4)
信号Us,Uc在峰值区间进行同步采样和保持,经A/D转换器后变成与电压成正比的量,由式(4)进行反正切运算,即可解算出数字角φ[2]。
1.2 步进电机信号处理
步进电机在船舶上应用广泛,其中步进式分罗经就是典型的例子,其功能就是将脉冲信号变换为相应的角位移,即有一个脉冲信号,电机转一个角度。分罗经中通常使用的步进电机是每来一个脉冲,转子旋转30°,对应的分罗经刻度盘的刻度为1/6°,机分罗经转子与分罗经刻度盘的齿轮传动比是180∶1,在1°的航向变化中步进电机S1、S2、S3三个绕组分别为S1、S1S2、S2、S2S3、S3、S3S1呈周期变化,每一步为1/6°,在1°之内步进输出的三个导线上S1、S2、S3电压信号已经是脉冲编码了。据此可列真值表1的信号代码。
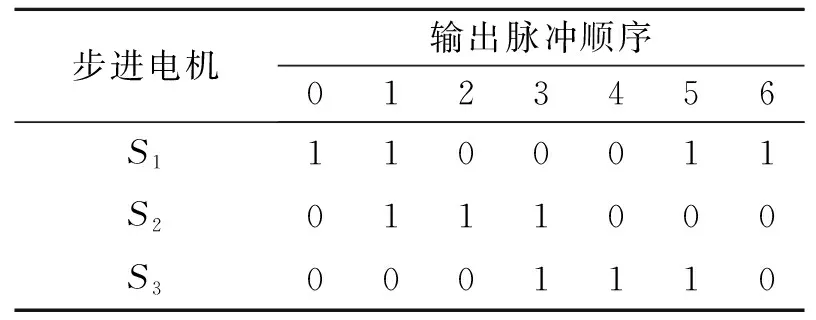
表1 葛雷码真值表
表中:“1”代表高电平(35 V或者70 V),每个“1”相当于1/6°的航向变化,6个“1”为1°航向变化,相当于转子旋转360°。
由表1可知,每两个相邻的代码之间,只有一位数是不同的。这正好是3位6进制循环码(或称为葛雷码),与普通的3位8进制葛雷码相比,这里缺少“000”和“111”两个代码,由真值表1还可以看出,每条输出线均在相邻的三个代码中为高电平,三个相邻代码为低电平。
在实际电路中,要考虑电平问题。步进式罗经中,三相电路的输出电平通常是35 V或者70 V。在输入单片机中时,需要的是TTL电平,即5 V电平。因此需要将35 V和70 V电压降到5 V,并且考虑噪声隔离,采用光敏元件作为开关元件。经过降压处理得到TTL电平信号后,该信号由8212锁存器锁存,供单片机读取。
1.3 单片机串口输出设计
单片机89C51主要完成多路转换开关选择、数据采集、信号格式转换和信号输出等功能。它的外围电路主要有时钟电路和复位电路以及串口输出转换电路。89C51读取自整角机或者步进电机信号后,对信号进行数据处理。对自整角机信号根据反正切运算,查表求得自整角机角度数字信号;对步进式罗经信号,查葛雷码真值表,得到1°以内的航向变化量,根据航向的增减,由原航向加或减该航向的变化量得到实时航向。
不论是自整角机信号还是步进式罗经信号,只要有信号变化,单片机就将变化后的信号转换为标准的NMEA-0183格式信号,送单片机串口输出。串口输出的通讯协议标准主要有RS-232C和RS-485,可以分别采用MAX232和MAX483来实现RS-232C和RS-485的接口电路,满足不同工作场合的需要。
2 软件设计
系统主程序是一个无限循环程序,不断查询是否有步进电机信号请求采集的信号和自整角机位置信号。当有信号时,调用相应处理程序进行处理,由串口输出标准的NMEA-0183格式信号。
2.1 自整角机信号数字化程序设计
自整角机位置信号数字化的软件工作流程为:完成对单片机的初始化;多次进行A/D输入端短路时的A/D转换,取它们的平均值作为A/D输入端的零位偏差,供主程序校正;确定分区,计算K;查表,由K值查到θ的值;将θ值保存在一个约定好的存储区中。然后按照NEMA-0183格式把信号传送到单片机的串口供传输。见图3。
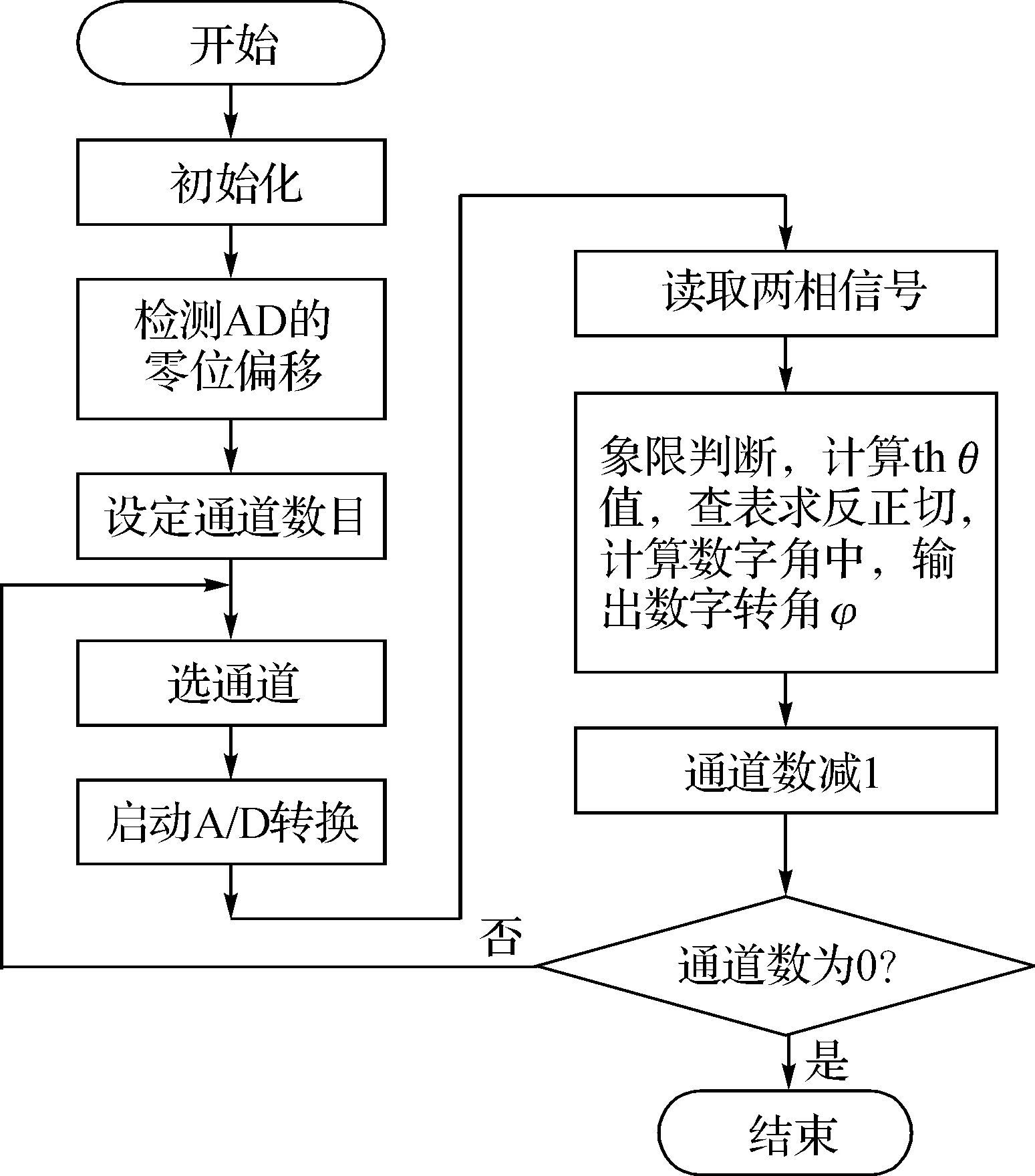
图3 自整角机位置信号处理流程
2.2 步进电机信号数字化程序设计
罗经接口提供了格雷码变化的信息后,软件的任务就是将这种变化转换为相对航向信号,此航向信号以两字节二进制数表示,单位为1/6°。当相对航向在零度附近摆动时,程序要能给出正确的示值。见图4。

图4 步进电机位置信号处理流程
2.3 0183格式输出
NMEA-0183标准中对不同的发送设备定义了不同的TALKER ID。TALKER ID为两个字符,共计35个。同时定义了上百个数据形式代码,每个代码3个字符。数据串必须是79个字符或更少。字符采用美国国家标准ASCLL码[3]。例如步进式电罗经的信号格式为:$HEHDT, x.x, T *hh〈CR〉〈LF〉,部分串口通讯显示见图5。
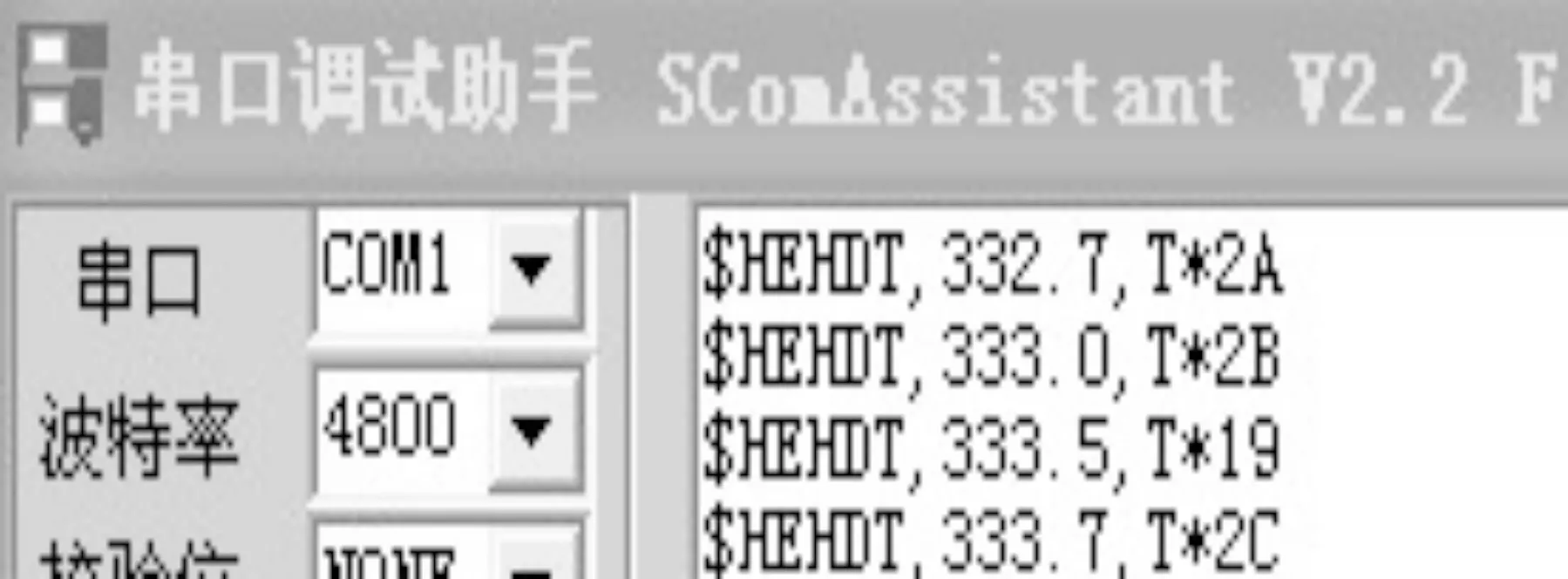
$-数据串开始;HE-电罗经;HDT-真航向;,-数据区定界符;332.7-度数;T-True;*-校验和识别码;2A-校验和;〈CR〉〈LF〉-数据结束回车换行。图5 步进式电罗经串口通讯
3 结束语
本设计以单片机作为信号采集与处理核心,根据自整角机信号和步进电机信号不同的特点分别设计了不同的采集和处理电路。经过本系统处理后,不论自整角机信号(模拟信号)还是步进电机信号(数字信号),都输出符合NMEA-0183格式标准的RS-232电平信号,由此解决了船舶设备通讯时的信号不一致问题,提高了船舶的自动化程度,适应了现代航海设备的要求。
[1] 胡 皓,董辰光.自整角机/数字转换器及其外围电路设计[J].测控技术,2005,24(5):90-91.
[2] 高文政.一种轴角到数字转换器的设计[J].情报指挥控制系统与仿真技术,2002(11):59-62.
[3] NMEA-0183 V2.20 Standard For Interfacing Marine Electronic Devices[S].National Marine Electronics Association, 1997.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
微特电机(2022年1期)2022-02-11
新世纪智能(高一语文)(2021年3期)2021-07-16
世界海运(2021年3期)2021-03-30
船海工程(2021年1期)2021-03-02
中国船检(2020年10期)2020-11-07
民用飞机设计与研究(2019年4期)2019-05-21
中学数学杂志(高中版)(2016年6期)2017-03-01
电子制作(2017年24期)2017-02-02
福建中学数学(2016年7期)2016-12-03