微粒群优化算法在铺排船建模中的应用
2007-01-28 08:05,,
船海工程 2007年6期
,,
(1.华中科技大学 控制工程系,武汉 430073;2.武汉理工大学 自动化学院,武汉 430063)
对于工程船舶,已有一些建模研究[1-4],但目前还没有较成熟的运动模型用于运动控制。
船舶运动模型是一个典型的非线性系统,有研究[5]表明,具有一个或以上Sigmoid隐层的多层前馈网络可以以任意精度逼近任意非线性函数,是通用的非线性函数逼近器。因此神经网络尤其是BP前馈型神经网络已越来越多得应用于非线性系统辨识与建模。但要基于梯度的神经网络建模也存在过匹配、训练容易陷入局部极小等问题,因此出现了遗传算法、模拟退火算法等优化算法。
微粒群优化算法概念简单,实现容易,近年来得到了很大的发展,并在许多领域得到应用[6-8]。
以长江航道治理工程中使用的软体排铺设船(以下简称铺排船)为研究对象,依托工程实践中采集的数据,建立实用的工程船锚泊移位运动模型,为自动控制器的设计和仿真平台的建立提供模型基础。
1 铺排船简述
铺排船是为适应航道整治工程的需要,满足对软质基础河床构造建筑物的要求而设计的专用工程船舶。其主要功能是将柔性排体(航道治理工程主体结构堤身下的护底结构)铺展在水下预定位置,主要机构包括锚泊移位系统、卷筒机构、滑板机构和其它附属机构。铺排船没有自航能力,完全依靠锚泊移位系统(主要由多台移船绞车构成)实现移船施工[9]。
移船施工过程中,根据GPS定位系统反馈的船舶位置和航向信息,船舶左侧两台移船绞车收缆,右侧两台移船绞车放缆,船舶向左平行移船,同时卷筒下放软体排布。协调控制四台锚绞车和卷筒绞车的收放速度,使船舶沿预定直线移动,最终将软体排铺设在预定位置。
对铺排船施工自动控制器的设计要基于铺排船锚泊移位系统的运动模型[10]。
2 建模与仿真
2.1 基于神经网络的锚泊移位系统建模
根据铺排船锚泊移位系统组成,设计一个三层BP网络,输入层四个输入元分别表示四台移船绞车收放缆速度给定,隐含层包含12个神经元,输出层只有一个神经元,表示铺排船横向位移。系统辨识结构见图1。

图1 锚泊移位模型网络建模结
图中V=[v1,v2,v3,v4],v1~v4分别为尾左、尾右、首左、首右四台移船绞车收放缆速度给定,y为船舶横向位移。辨识模型采用串并联结构,即将被控对象的输入输出数据样本作为BP网络的输入,利用学习算法不断减小网络模型输出与被控对象输出的差值,最终实现对锚泊移位系统模型的逼近。
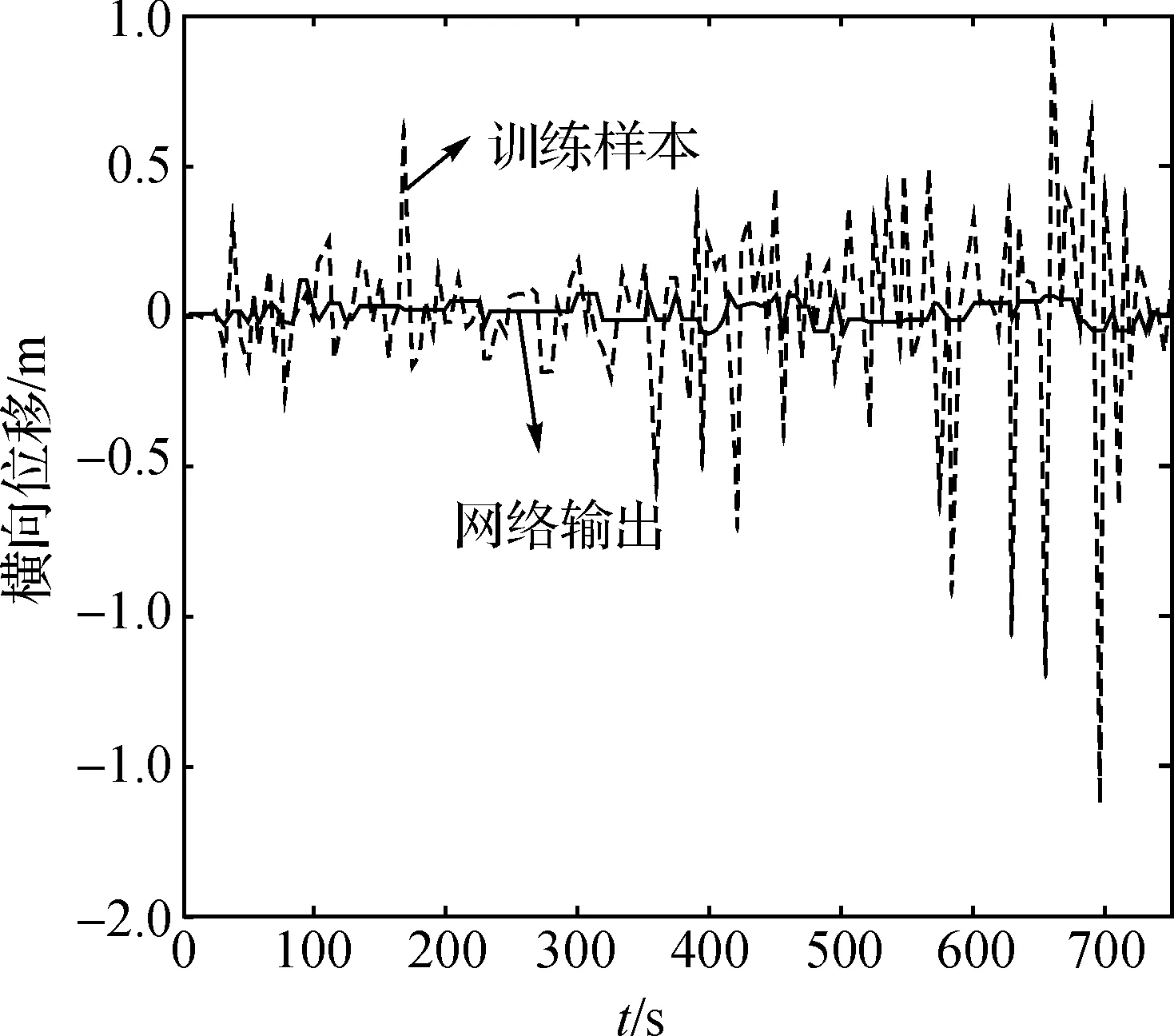
以MATLab 7.0软件为仿真研究平台,利用其神经网络工具箱可方便地实现神经网络的创建和训练过程。结合工程项目实践,从现场实测数据166组数据,采样周期为5 s。将实测数据逢10间隔抽取16组数据作为检验样本,其余150组作为训练样本,采用Levenberg-Marquardt(简称L-M)算法来训练网络参数。系统模型辨识结果见图2。

a) 模型网络输出与训练样本
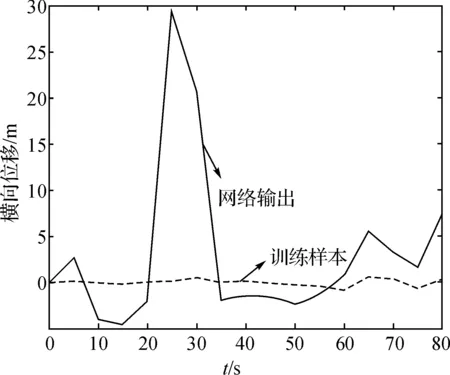
b) 模型网络输出与检验样本图2 基本L-M算法的BP神经网络模型输出结
就训练样本而言,该模型网络输出较好地逼近了训练样本。但对于检验样本,其误差较大,即模型泛化能力较差。
2.2 基于PSO算法的模型优化
利用PSO算法对前述神经网络模型进行优化训练,即利用PSO算法对网络权值和阀值进行优化训练,使其网络输出误差最小。
BP神经网络共有60个权值和13个阀值,故选取寻优参数θ=[W1,W2,B1,B2],包含73个元素。设i=1,2,3,4;j=1,2,…,12。
则寻优参数定义为:
W2=[w21w22…w212]
B1=[b11b12…b112]
式中:w1ij——第i个输入神经元到第j个隐层神经元的权值;
w2j——第j个隐层神经元到输入神经元的权值;
b1j——第j个隐层神经元的阀值;
B2——输出神经元的阀值。
适应度函数f()取模型网络输出误差的均方差,即
(3)
式中:tk——输出样本值;
pk——模型网络输出值;
S——样本对数量。
寻优目标为适应度函数的最小值。
2.3 初始PSO算法参数设置
种群规模N=50;
惯性权重w=1.4~0.3,线性减小;
c1=c2=2.005;
寻优空间维数D=73;
最大迭代代数100。
采用同样的训练样本和检验样本测试,经PSO优化后的系统模型输出结果如图3所示。
比较图2和图3,不难发现,经PSO算法优化得到的锚泊移位系统模型能够较好地反映铺排船运动特性。该模型可作为铺排船施工作业自动控制器仿真设计的模型对象。
a) 模型网络输出与训练样
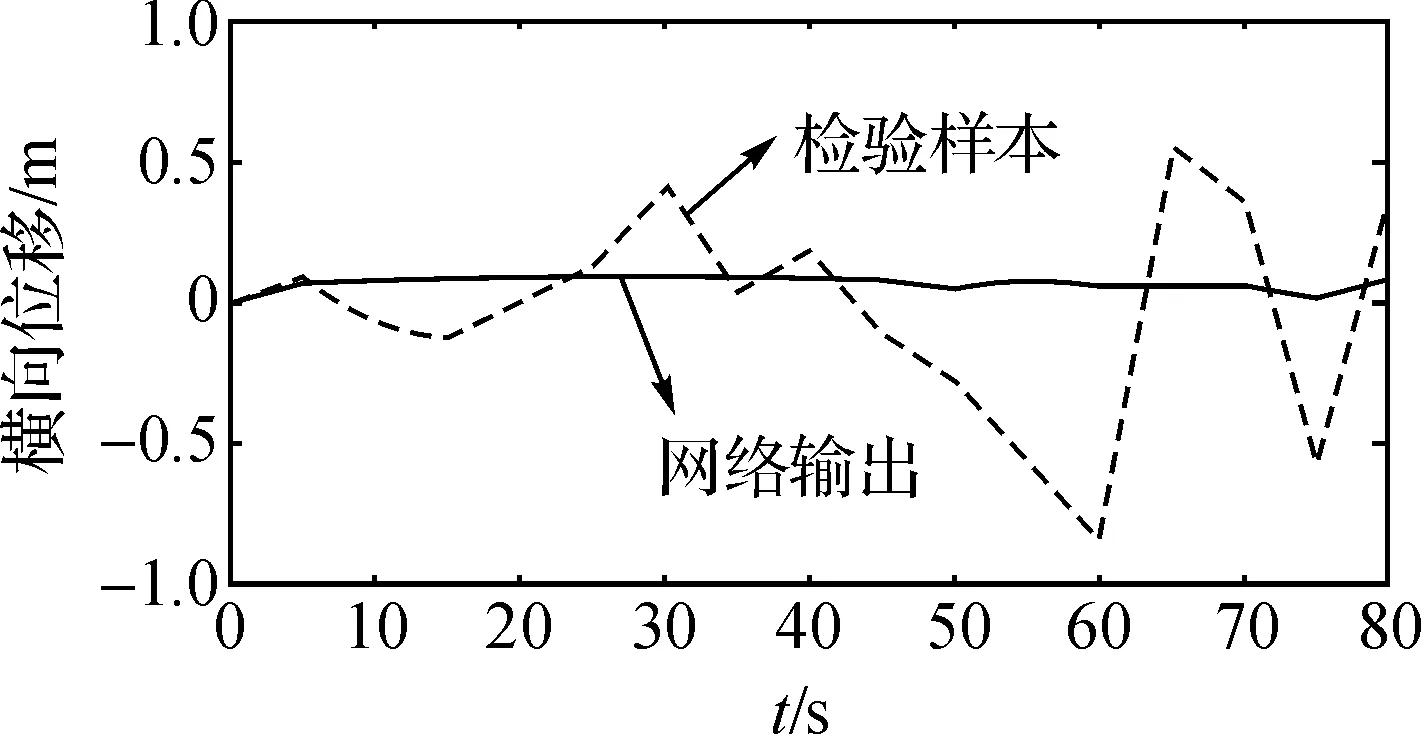
b) 模型网络输出与验证样本图3 基于PSO算法训练优化的BP神经网络模型输出结
3 结论
对于难以建立精确数学模型的复杂的非线性系统,神经网络辨识建模是一种普遍采用的建模方法,但常规的训练算法难以达到精度的要求。
利用PSO优化算法对网络权值和阀值进行优化训练,可大大提高辨识模型的性能。该建模方案对类似工程船舶建模问题具有借鉴作用。
当然,PSO优化算法自身也存在一些缺点,如参数设置缺乏通用公式,容易早熟,即过早收敛使寻优停滞等。对PSO优化算法的改进以及与其他算法综合应用研究还有待进一步。
[1] 魏云雨,洪碧光,于 洋.锚泊运动的数学模型[J].大连海事大学报,2004(3):21-23
[2] 魏云雨.锚泊偏荡运动数学模型的研究[D].大连:大连理工大学,2001.
[3] 郑瑞杰.锚泊系统受力分析[D].大连:大连理工大学,2006.
[4] 孙明坤.系泊船舶缆绳受力控制系统研究[D].大连:大连理工大学,2006.
[5] Hecht N R.Theory of the backpropagation neural networks[J].Proceeding of the International Joint Conference on Neural Networks, 1989(1): 593-611.
[6] Kennedy J ER.Particle swarm optimization[C].Proc IEEE Int Conf on Neural Networks, 1995:1942-1948.
[7] Chau K W.Particle swarm optimization training algorithm for ANNs in stage prediction of Shing Mun River[J].Journal of Hydrology, 2006,329(3-4):363-367.
[8] Zhou J L, Duan Z C, Li Y, Deng H C.PSO-based neural network optimization and its utilization in a boring machine[J].Mater Process Technol, 2006, 178(1-3):19-23.
[9] 郭晓浩.长江铺排船的开发建设[J].船海工程,2003(1):1-6.
[10] GarzaRios L O,Bernitsas M M.Analytical expressions of the bifurcation boundaries for symmetric spread mooring systems[J].Applied Ocean Research, 1995, 17(6): 325-341.
[11]谢晓锋,张文俊,杨之廉.微粒群算法综述[J].控制与决策,2003,18(2):129-134.
[12]王俊伟.粒子群优化算法的改进与应用[D].沈阳:东北大学,2006.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
昆明医科大学学报(2022年4期)2022-05-23
电子产品世界(2021年8期)2021-01-16
中华养生保健(2020年7期)2020-11-16
船舶标准化工程师(2019年4期)2019-07-24
舰船科学技术(2018年8期)2018-09-02
现代装饰(2018年5期)2018-05-26
创新时代(2016年8期)2016-10-21
江苏船舶(2015年1期)2015-05-06
舰船科学技术(2015年10期)2015-03-12