
X型尾舵潜艇操控与运动关系研究
2007-06-01 12:30栾和春林俊兴
船海工程 2007年2期
栾和春 林俊兴
海军工程大学船舶与动力学院 武汉 430033
X型尾舵潜艇操控与运动关系研究
栾和春 林俊兴
海军工程大学船舶与动力学院 武汉 430033
在分析潜艇X型舵水动力特性的基础上,建立X型舵与十字型舵操纵力的等效关系,用于指导潜艇X型舵的初步设计;分析X型潜艇的操控与潜艇运动的关系,用于潜艇X型舵的自动控制装置设计,部分解决了X型舵自动控制装置相关理论问题。
潜艇 X舵 操纵
为了提高潜艇的操纵性和生命力,我国将在未来的新型潜艇采用分离式舵。而作为分离式舵的一种,X型舵[1]越来越受到重视。近年来,欧洲一些潜艇强国在新建的潜艇上陆续采用X型舵,并取得了很好的效果。从60年代中期至今,瑞典海军设计和建造的潜艇毫无例外的都采用X型舵;德国从“212”型潜艇开始,所有建造的潜艇都采用X型舵;荷兰于海军建造的“海象”级潜艇也采用X型舵;挪威海军的“ULA”级常规潜艇也采用X型舵。各国采用X型舵主要基于以下几点考虑:尾操纵面不超出艇体边界线;机动性好;消除了十字型舵潜艇回转时存在的艇重尾重现象;提高了舵装置的可靠性和潜艇的水下抗沉能力。我国也提出未来新型潜艇上将对我国目前使用的十字型尾舵进行改进,其中X型舵便是一个主要方向。本文主要是对X型舵的操控与潜艇运动关系的定性分析研究。
1 X型舵与十字型舵等效舵角转换数学模型
定义产生右横倾的舵角为正舵角,舵号和“+”舵角规定以及受力见图1。
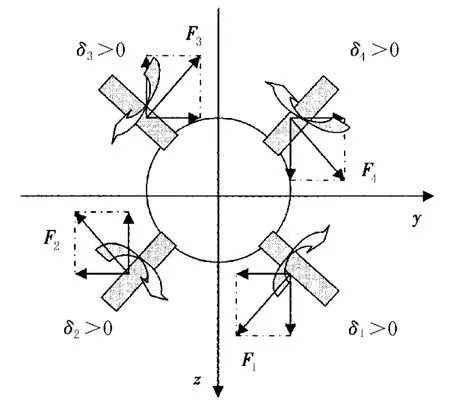
图1 X型舵受力图
按照ITTC坐标系的符号规则,操纵X型舵时,在固联于潜艇的动坐标系Gxyz中产生了一个空间的水动力,以分析X型舵对航向和深度的操纵效果为目的,故忽略x方向的分力,只考虑它们在Gyz平面上的水动力分量F1、F2、F3、F4。它们在y轴和z轴投影的合力Yx和Zx为[2]
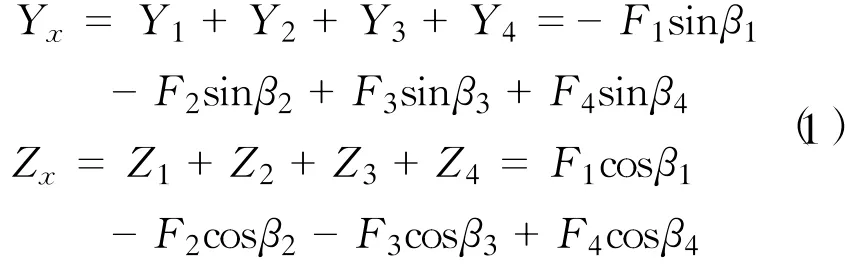
式中:β1、β2、β3、β4——舵与y轴的夹角,取锐角。
取β1=β2=β3=β4=45°时的特例,式(1)化为
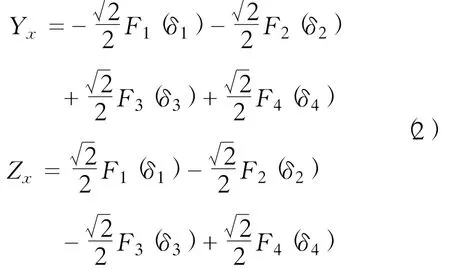
式中:δ1、δ2、δ3、δ4——X型舵的4个舵的舵角。
对确定的艇型和舵结构,可表示如下

式中:F°(δi)——每度舵角产生的水动力在Gyz面上的投影,此时,δi以角度为单位。
因此假设X形舵的δ1、δ2、δ3、δ4舵的舵叶面积相同,并忽略δ1、δ2、δ3、δ4舵流场的差别,因此,可以假设F°(δi)=k,由式(1)得

再进行对十字形舵的升降舵和方向舵的受力分析

式中:δr、δs——十字型舵的方向舵舵角、尾升降舵舵角;
忽略流场的变化和一些水动力特性,可令k1=k;等效y向和z向

由于X舵是采用4舵独立控制故可以控制和产生横倾(规定右横倾为正):
从而导出通式
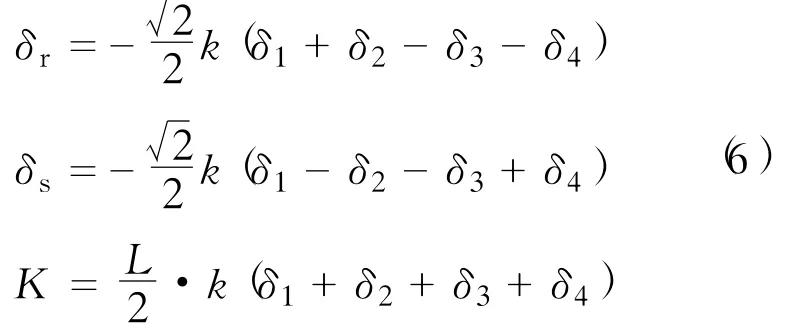
式中:K——横倾力矩;
L——横倾力臂。
等效关系式建立的意义在于为中间转换机构建立理论基础,同时,式(6)只是一个通式,比较概括,很显然可以看出,式(6)有3个方程式,却有4个未知数δ1、δ2、δ3、δ4,可以设想应该是出现这样的情况:同样的操舵效果会出现多种操舵方式,这就需要下一步的具体操舵方式的理论计算并从不同的方面进行比较,从而得出每种运动方式的最优操舵方式。
2 操舵角与潜艇运动关系分析
潜艇在正常航行工况下舵装置工作正常时,X舵的常用组合有24种(其中双舵20种,四舵4种)可以满足单平面机动和空间机动的需要当需要横倾控制时,有6种组合可以选择(其中双舵4种,四舵2种)。
2.1 水平机动
1)水面航行操水平方向的1、2同向舵,锁定3、4舵,水面航行潜艇外横倾,使用1、2舵可以一定程度阻止外横倾的产生,并且,3、4舵可能部份露出水面,舵效低,所以建议水面回转采用该方式。
2)水下航行操水平方向3、4舵,锁定1、2舵;因为水下航行潜艇内横倾,使用1、2舵会加剧横倾,用3、4舵可以一定程度阻止内横倾的产生。具体见表1。
2.2 垂直机动
操水平方向相邻反向舵,即1、2反向舵或者3、4反向舵;因为操垂直方向两舵会产生横倾,且横倾随航速和舵角的增大而增大,不利于潜艇的安全,操四舵用舵相对多,速度相对快一些,但不便于操控,如果不是紧急状况,建议采用水平相邻两舵,既可以满足需求,又能提高使用寿命。具体见表2。
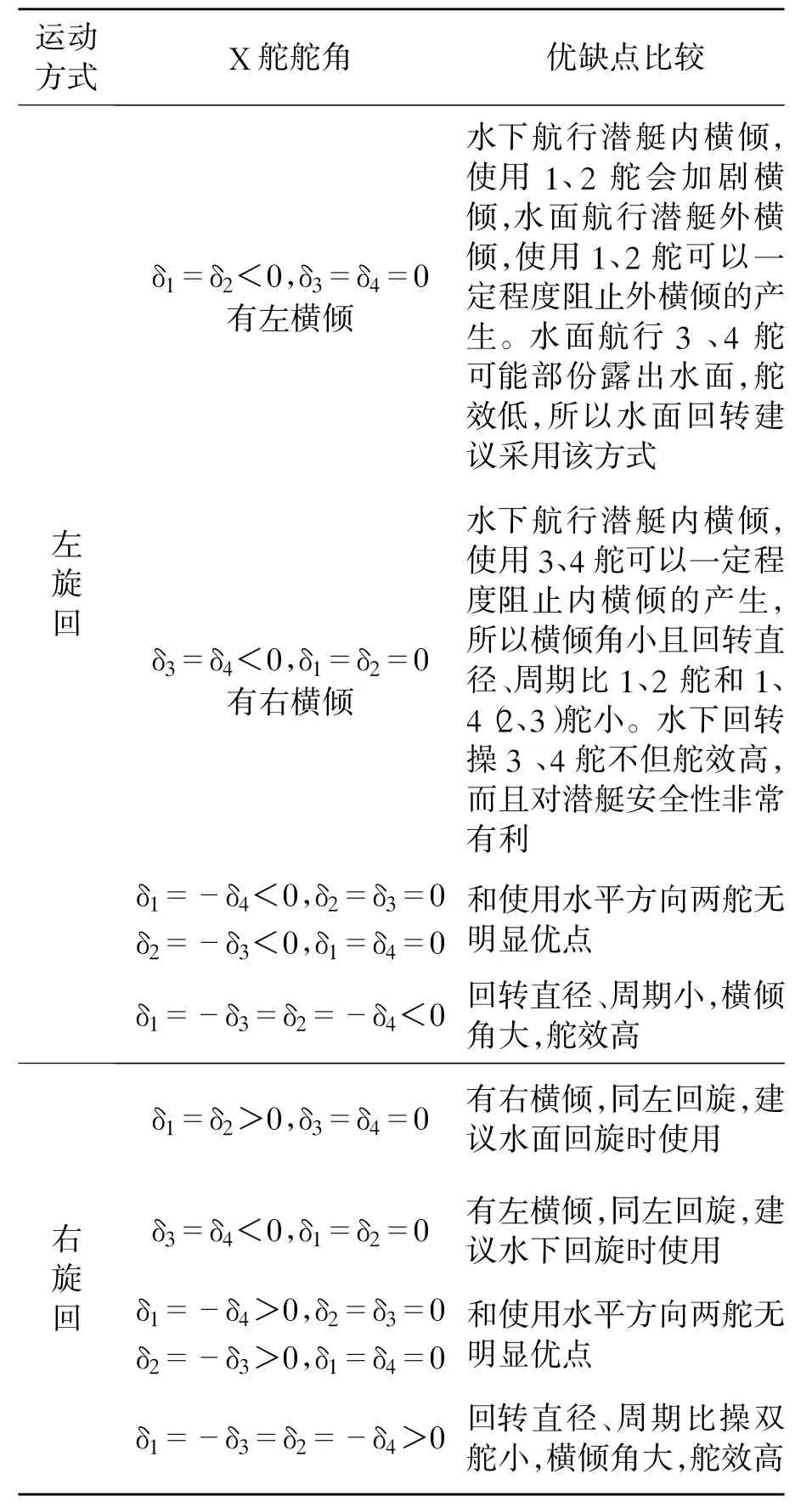
表1 水平运动与舵角关系及比较
2.3 空间机动
反向操对角舵,另一对舵锁定,都不产生横倾。具体见表3。
2.4 横倾控制
同向操对角舵,正常航行不需要横倾控制,特殊情况下采用,例如:潜艇高速空间机动时,可以抑制较大横倾,以高速右旋回上浮为例:操1负舵,3正舵右旋回上浮,舵本身不产生横倾力矩,潜艇水下转向产生内横倾,此即右横倾,可以操2,4负舵产生左横倾的力矩,抵消部分右横倾力矩。具体横倾控制见表4。
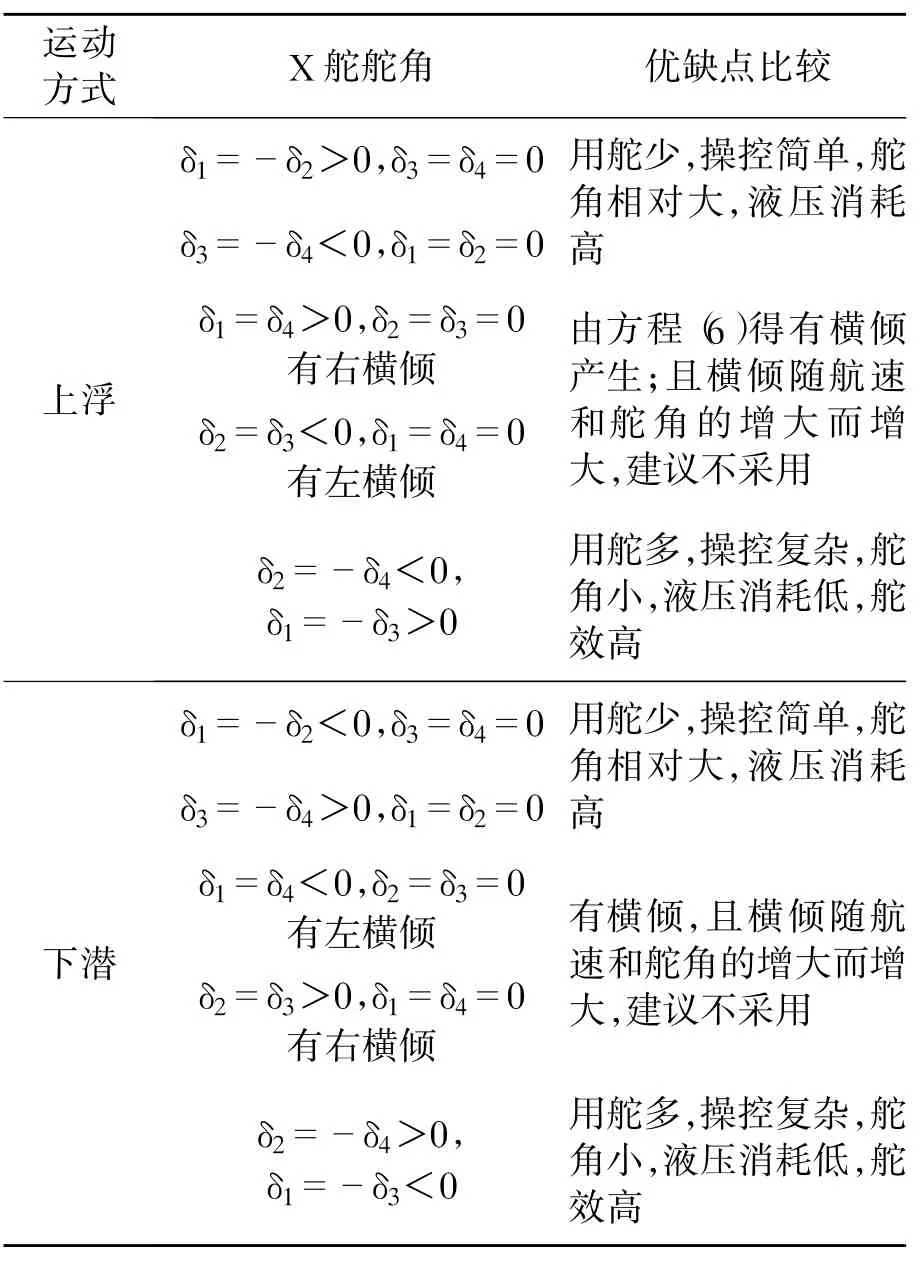
表2 垂直机动与舵角关系及比较
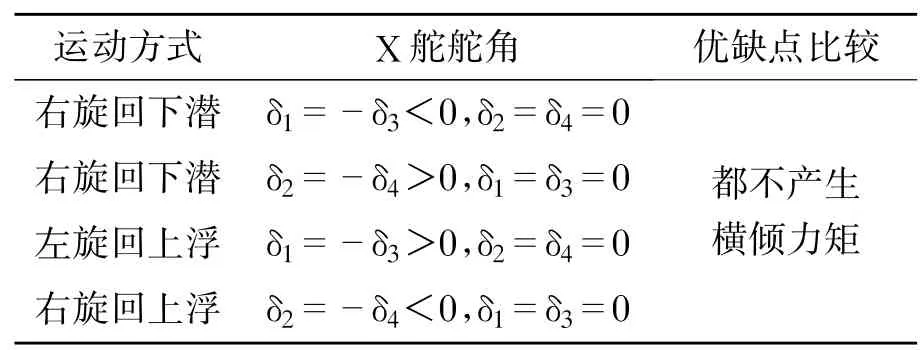
表3 潜艇空间机动与舵角的关系

表4 潜艇横倾控制与舵角的关系
3 结论
潜艇正常航行时,使用两舵即可,通常两对舵交换使用以提高使用寿命。水平机动,水面航行操1、2同向舵,锁定3、4舵;水下航行操3、4同向舵,锁定1、2舵;垂直机动,操1、2反向舵或3、4反向舵;空间机动,反向操对角舵;横倾控制,同向操对角舵。主要是对X型尾舵潜艇舵角与运动关系的定性分析,根据潜艇操纵的安全性,机动性以及使用寿命和操舵复杂程度等方面考虑,提出优选方案,没有进行模拟仿真运算分析。下一步打算对X型舵与十字型潜艇在不同航速,深度等具体情况下模拟仿真运算和性能分析,进一步研究X型舵潜艇的实际操纵特性和控制理论。
[1]施生达.潜艇操纵性[M].北京:国防工业出版社,1995:10-11.
[2]林俊兴.X形舵和十字形舵操纵力等效关系的研究[J].舰船科学技术,2004(6):1-2.
Relationship of maneuvering and motion for the submarine with X-rudder
LUAN He-chun LIN Jun-xing
School of Naval Architecture and Power Naval University of Engineering Wuhan 430033
The equivalent relation of X rudder and cross rudder is established on the basis of analyzing the hydrodynamic characteristics of X rudder of submarine,which can be used to guide the preliminary design of the X rudder.The relationship of motion and maneuvering for the submarine with X rudder are studied for designing the automatically controlled device of the X rudder.The theoretical question of the automatic control device of submarine with X rudder is solved partly.
submarine X-rudder maneuvering
U661.33
A
1671-7953(2007)02-0100-04
2006-09-08
修回日期2006-10-11
栾和春(1981—),男,硕士生。
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
数学大王·低年级(2018年4期)2018-05-07
北京航空航天大学学报(2016年9期)2016-11-16
中国水运(2015年2期)2015-04-23
科技视界(2014年26期)2014-12-25
小朋友·快乐手工(2009年1期)2009-02-07
