基于GPS测量系统的舰载作战系统动态航向对准技术研究
2009-04-12 07:46李维林唐伟方
中国舰船研究 2009年4期
李维林 李 蕾 唐伟方
中国舰船研究设计中心,湖北 武汉430064
基于GPS测量系统的舰载作战系统动态航向对准技术研究
李维林 李 蕾 唐伟方
中国舰船研究设计中心,湖北 武汉430064
针对舰载导航系统对准的实际需求,介绍一种在舰艇动态条件下,利用GPS完成导航系统航向对准的方法,对其中的对准过程和数据处理方法进行详细介绍。通过精度分析,证明该对准方法满足航向对准的要求,同时对保障条件要求低,便于操作,为舰载作战系统的航向对准提供了新的选择。
作战系统;GPS测量系统;航向对准;精度分析
1 引言
虽然我国舰艇作战系统的对准技术已得到较大提高,但是动态条件下对准工作仍然是一个难题[1]。一般来说,舰艇下水后,不可能有机会再专门安排入坞进行导航系统对准。所以在动态条件下进行导航系统的航向对准是一个迫切需要解决的问题[2,3]。
随着GPS测量技术的飞速发展,其应用领域得到不断扩展,在强大的软件支撑下,GPS已经能够完成动态条件下舰艇航向的精确测量,这使得直接在系泊状态下进行舰艇航向的对准成为可能[4]。
2 基于GPS测量系统的航向对准方案
在舰载作战系统动态航向对准过程中,采用双频的GPS接收设备,进行差分定位测量后,将两个站的观测数据利用专用GPS数据后处理软件(GrafMov)进行数据处理,可以得出两个GPS接收设备连线与真北方向的夹角,实现舰艇动态航向的真值测量,从而为舰载导航系统的航向对准提供真值。
GrafNav/net是加拿大专业GPS软件公司开发的GPS/GLONASS事后处理软件包,是GPS动态和静态数据处理软件,可以非常方便地选择组合方式进行数据处理,得到厘米级的定位精度。同时它可以非常容易地将数据由静态模式变换到动态模式下进行数据处理,有助于用户在动态模式下修复其它不可恢复的周跳。软件中还包含有卫星预报菜单,利用该功能用户可以非常方便地计划测量的时间,将测量时段选择在卫星状况较好的情况下进行测量,从而取得更好的定位结果。方案中所使用的后处理软件GrafMov包括了Graf-Nav/Net的所有功能,并增加了动态基线的处理功能,即移动基线处理与航向解算功能[5]。
进行动态航向对准时,舰艇处于系泊状态,根据不同舰艇配置的导航系统不同,在进行动态航向对准之前提前6~8 h开机工作,以使其输出稳定的航向数据。
在进行航向对准检测时,在舰艇甲板中线面的前后中线面标志板上各架设1台GPS接收机,精确校准GPS接收机的位置,按照标志板中心对中调平,测量甲板上舰艇中线面上标志板连线的方位角并同步记录导航系统输出的航向值。
利用GPS测量系统进行i次(i=1,2,3)连续测量。每次测量时间约为30 min,按每秒钟取得1个航向测量值计算,每次连续测量大约可以获得有效数据1 800个,按以下的算式计算导航系统航向测量的瞬时误差。

在计算得出每一瞬时航向测量误差值后,按下式计算每次连续测量时间段内的航向误差算术平均值。
根据各时段所得的瞬时误差的平均值,按下式计算航向误差平均值。
式中,ΔKij为在第i次GPS测量过程中导航系统第j个航向测量误差;Kij为在第i次GPS测量过程中导航系统第j个所测的航向值;KGPSij为在第i次GPS测量过程中GPS系统测量的第j个航向真值;ΔKi为在第i次GPS测量过程中,航向瞬时误差值的算术平均值;ΔK为在整个测量过程中,航向误差的算术平均值。
如果所得的航向误差ΔK的绝对值不超过导航系统航向的对准精度指标要求,则认为导航系统航向输出的精度是合格的。
如果所得的航向误差ΔK的绝对值超过导航系统的对准精度指标要求,则对导航系统航向零位进行修正,再次进行动态对准试验,直到满足要求为止。
3 动态航向对准精度分析
利用差分GPS进行动态航向测量的误差源主要有如下两个方面。
1)GPS测量系统测量误差
根据GPS测量系统的技术参数可以看出,差分测量方式下,根据不同的GPS测量系统及处理方法[6],GPS动态相对定位准确度为2~10 cm,本方法所使用的GPS及处理软件可以达到的精度为2 cm,设定测量基线长度为L(m),则GPS动态方位测量精度为:

对于1艘长约150 m的大型水面舰艇,测量基线长度约为140 m,则方位测量精度为30″。
2)横摇引起的GPS测量误差
由于舰艇中线面上前后架设的GPS天线存在高度差,同时,由于舰艇系泊及航行过程中存在横摇角,这就使得GPS实际天线的连线并不与中线面平行,势必造成GPS测得的航向值并非中线面所对应的值,存在一定偏差,也使得GPS实际测量的航向与导航系统的航向基准存在偏差。如图1所示,B点与D点为舰艇中线面上GPS架设的实际位置,AB为中线面上平行于舰艇水平基准的直线,C点为D点在AB所确定的平行于舰艇水平基准的平面上的投影,即ABC平面为横摇情况下与舰艇水平基准平行的平面,Δh为前后GPS天线高度差,舰艇横摇角为α,BC与真北的夹角即为GPS所测得的航向值,其与中线面的偏差角为β,计算公式如下。
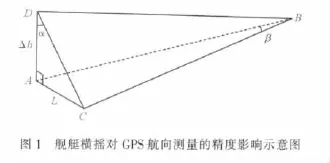
图1 舰艇横摇对GPS航向测量的精度影响示意图
在舰艇主甲板的中线面上均设置有标志板,在舰艇上前后标志板的高度差不超过1 m,同时通过调整GPS天线的架高,可以保证前后GPS天线高差Δh小于1 m,根据舰艇实际系泊情况统计,可以保证其横摇角小于1°,由此可以计算得出在此情况下,由于舰艇横摇引起的GPS测量航向的误差。

综合以上两方面的误差,可以得出利用GPS测量航向时所具有的精度为:

按“舰船系统对准要求”(GJB 1233-91),对准方法误差均不会大于舰面设备对准容差的1/3~1/10。
根据目前一般舰艇导航系统的精度,该精度完全可以满足其对准要求。所以,可以利用GPS动态航向测量方法来进行导航系统的航向对准。
4 试验验证过程
笔者在实船动态条件下对上述舰载导航系统的动态航向对准方法进行验证,下面介绍有关试验方法和数据记录及处理情况。
4.1 导航系统航向实测值的获取
我国目前导航系统采用以太网与作战系统相连接,这就使得作战系统下的检测录取设备能够实时地录取导航系统输出的航向值,该设备可以在线翻译、解释录取的报文,对原始报文数据进行分析处理后以文本文件存储,在进行动态航向对准时,检测录取设备与外部时钟对时后,与GPS测量系统同步记录试验数据,并在试验结束后将所记录数据进行存储。表1为利用专用软件处理检测录取设备录取的导航系统航向数据后的结果。

表1 导航系统航向数据处理结果
4.2 航向测量真值的获取
在获得GPS测量原始数据后,利用专用GPS数据后处理软件GrafMov进行数据处理,实现舰艇动态航向的真值测量,从而为舰载导航系统的航向对准提供真值,该真值数据率为1次/s。
利用GPS后处理软件GrafMov对GPS测量数据进行处理后得到如表2所示的真值数据。

表2 GPS测量真值数据
4.3 GPS测量航向与本舰航向数据比对方法
在舰船系泊或航行状态下,其航向实测值与GPS测量真值都是随时间变化的量,且两组参数的数据率不相同,如某型舰导航系统实际输出航向数据率为50帧/s,GPS测量系统处理后数据率为1帧/s。为了比对、分析测量值与真值之间的误差,必须要将二者在同一时刻进行比较,以保证数据有效性。为此,在Visual C++环境下,笔者使用标准的Visual C++语言编写了GPS测量航向与本舰航向数据比对软件,实现GPS测量航向与本舰实际输出航向的比对。该软件运行时,首先逐行读取经过处理的如表1所示的以TXT文件格式存储的导航系统航向测量值,然后读取经过GPS后处理软件处理后以TXT文件格式存储的GPS测量真值,其格式如表2所示。每读取一帧航向实测值后,根据“录取时间”变量的值,在GPS测量值中选择与其同一时刻的真值,并将真值与测量值一并写入文件,直到所有航向测量值均找到与之对应的GPS测量真值为止,并以TXT文件格式存储,表3所示为一组实际处理后的数据。
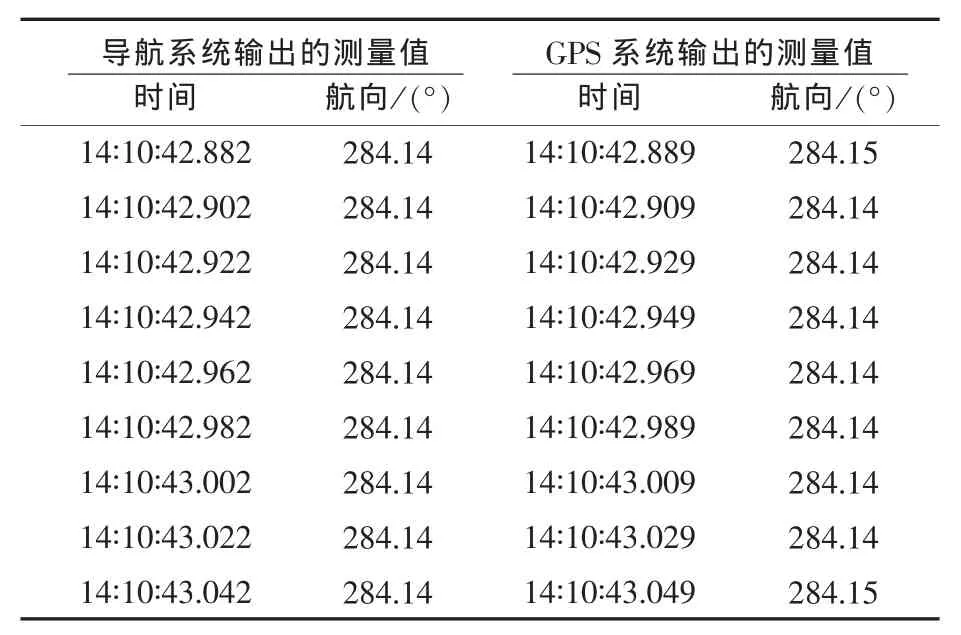
表3 GPS航向测量数据对齐结果
根据获得的航向测量值与GPS真值 “对齐”后的数据,分析航向误差,从而得出检测结论,确定航向修正量,导航系统据此完成动态航向对准。
5 结束语
随着GPS技术的快速发展,其应用范围越来越广,其通用成熟的技术对于作战系统动态对准来说是一种非常便捷、高效的手段。本文所介绍的方法充分利用了GPS测量系统的成熟技术,结合舰载作战系统中导航系统的实际特点和需求,并灵活利用现有装备,形成了一套完整的动态条件下航向对准的方法,并通过理论分析和试验验证,证明了该方法的合理性和可行性。该方法对保障条件要求低,便于操作,为舰载作战系统的航向对准提供了新的选择,这种基于GPS测量系统的动态航向对准方法和技术必将在将来的实际应用中发挥重要作用。
[1]邹立.动态条件下导航系统航向对准 [J].舰船光学,2003,39(3):30-34.
[2]马恒,许江宁,张晓峰,等.基于全站仪的高精度动态航向初始标校系统设计 [J].计算机测量与控制,2005,13(6):587-589,597.
[3]马恒,许江宁,朱涛.高精度航向姿态信息标校方法和测量模型研究[J].中国惯性技术学报,2004,12(2):77-80.
[4]徐绍铨,张华海,杨志强,等.GPS测量原理及应用[M].武汉:武汉大学出版社,2001.
[5]Waypoint Consulting Inc.GrafNav/GrafNet and GrafNav Lite Introductory Manual to GPS Surveying[S].Canada,2000.
[6]刘高峰,刘健.基于GPS定位系统的舰船雷达标校系统研究[J].舰船科学技术,2006,28(6):100-102,114.
[7]沙定国.实用误差理论与数据处理[M].北京:北京理工大学出版社,1993.
Dynamic Course Alignment on Ship-board Combat System Based on GPS Measure System
Li Wei-lin Li Lei Tang Wei-fang
China Ship Development and Design Center,Wuhan 430064,China
This paper introduces the course alignment technique based on GPS measure system when the ship is dynamic for the requirement of ship navigating system alignment.The alignment process and the way of data processing are introduced in detail.Precision analysis indicates that the alignment technique can satisfy the course alignment.It is easy to adopt this method that offers a new choice of course alignment on ship-board combat system.
combat system;GPS measure system;course alignment;accuracy analysis
U675.5
A
1673-3185(2009)04-68-04
2009-02-12
李维林(1979-),男,工程师,硕士。研究方向:舰载作战系统及对准。E-mail:lwl1200@163.com
李 蕾(1963-),女,高级工程师。研究方向:舰载作战系统及对准
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
锦绣·下旬刊(2019年3期)2019-09-10
民用飞机设计与研究(2019年4期)2019-05-21
专用汽车(2018年10期)2018-11-02
现代交际(2018年14期)2018-11-01
当代陕西(2018年12期)2018-08-04
电子制作(2017年1期)2017-05-17
电子制作(2017年24期)2017-02-02
探测与控制学报(2015年4期)2015-12-15