基于μC/OS Ⅱ的实时任务模型研究与应用
2009-05-12 03:14牛欣源孟庆昌
现代电子技术 2009年5期
牛欣源 孟庆昌
摘 要:通过研究实时操作系统内核及应用技术,分析实时操作系统性能指标;基于实时操作系统μC/OS Ⅱ内核接口和任务运行原理,提取实时任务的构成要素,构建实时任务模型。运用任务模型进行实时任务、实时应用程序的设计和实现。根据任务模型设计实现一个范例程序的基本功能和性能需求,将模型设计思想应用于实时软件开发,任务模型为实时程序研发和相关教学活动提供了一个简便的解决方案。
关键词:实时任务;实时应用程序;任务模型;实时性能
中图分类号:TP316文献标识码:A
文章编号:1004-373X(2009)05-108-04
Research and Application of Real-Time Task Model Based on μC/OS Ⅱ
NIU Xinyuan,MENG Qingchang
(Computer School,Beijing Information Science and Technology Univesity,Beijing,100101,China)
Abstract:By researching the Real-Time(RT) kernel and application developing techniques,analyzing RT system and application performance.Based on the kernal interface of RT operating system μC/OS Ⅱ and task control mechanism,this paper abstracts the constructed elements of the RT task,and produces the RT task model.Appling the task model to the design and implementation of the RT task and the application.An instance which applies the model is given to satisfy requirement of the function and the performance.This model and the instance prove that it can be used in developing the RT application and teaching practice activity easily.
Keywords:RT task;RT application programme;task model;RT performance
0 引 言
由于实时程序运行机制与传统程序相比具有独特性,在实时应用程序开发和相关教学实践中,如何根据应用需求和系统功能设计,确立实时程序结构,完成代码的设计与实现则是一个首要的、关键的问题。软件设计者常因缺乏简易、实用的实时软件开发基本方法,难以快速建立全面、系统的开发思路和实施步骤。现有实时内核技术及其应用软件开发资料篇幅较大,技术细节多,学习周期长,可操作性较差,一定程度上影响软件开发者的工作进度。需要一种简便易行、行之有效、可操作性强的开发方法,以便为快速全面了解、掌握实时软件开发流程提供指南。
为此,通过分析实时软件核心技术,结合μC/OS Ⅱ实时操作系统内核,提出一个实时程序任务模型。依据该模型,确立实时任务功能及处理流程,调用实时内核,确立一个实时应用程序基本结构,实现实时程序运行机制,最终完成一个实时应用软件的设计与实现,并提供一个简单范例应用该任务模型。
1 实时软件技术及实时软件构成
实时软件开发环境一般采用实时操作系统(RTOS)作为系统开发和运行支持平台,支持模块化开发,提高开发效率,缩短开发周期,便于程序的调试、维护,使实时性能得到保证,系统稳定可靠。RTOS为每个任务建立一个可执行环境,并可方便地在任务间传递消息,在中断处理程序和任务间传递事件,根据任务优先级实施抢占调度。
从实时操作系统 (Real-time OS)的内核功能、实现方法和运行机制可得其目标包括:按照抢占优先级策略控制管理实时应用程序每个并发任务的运行;每个任务在多长时限可以完成或得到响应。任务时限(deadline)是实现每个实时任务必备的性能指标。
时限可以分为硬时限(Hard Deadline)和软时限(Soft Deadline)。具有硬截止时间的任务即为关键任务,如果不能满足时限,则视为系统错误。根据任务设置的重要程度,将拥有关键任务的实时系统称为硬实时系统,否则称为软实时系统。
硬实时技术应用广泛。例如:航空导航、武器控制等应用系统,必须使用实现硬实时技术的操作系统,将计算、存储、显示和机电控制系统以严格时限组合为一个系统。
软实时系统运行方式与硬实时系统基本相同,区别在于只须满足统计意义上的实时要求。软实时系统一般要求满足时限的概率达到90%。比如,媒体播放系统一般要求1 s播放24帧图像。如果数据在数据严重负载的情况下,不能在1 s内处理24帧,造成播放失真。如果DVD播放正确率达到95%,用户就能基本满意。
实时应用系统能否满足实时性能的要求,可从以下指标进行考察。
1.1 中断延迟
从一个外部事件发生到响应中断处理函数的第一条指令开始执行,这段时长称为中断延迟。很多实时任务由中断驱动执行,中断事件必须在限定的时限内处理,否则将产生严重后果。
例如,设定烤箱温度达到300 ℃时自动切断电源。从传感器探测到该极限温度,到系统进入切断电源的中断处理程序,其间系统处理这个时长即为中断延迟。显然,这个时长对烤箱设备的使用安全至关重要。
1.2 抢占延迟
从一个外部事件发生到处理该事件任务的第一条指令开始执行,这段时长称为抢占延迟。大多数实时系统都是处理一些周期性或非周期性的重复事件,事件触发任务执行。每当事件发生,相应的处理任务必须及时得到调度执行,否则将无法满足时限。抢占延迟反映系统响应的及时程度。
例如:μC/OS Ⅱ某实时应用程序有如下功能,按照设定周期,需要运行统计任务对程序运行部分结果进行统计,从时钟到时,事件发生,到统计任务开始运行这段时间即为抢占延迟,这个时长决定统计结果误差的大小。
图1表示实时软件设计编程和运行层次结构。该图对实现实时应用程序功能设计接口和运行机制进行层次划分。指明基于操作系统内核进行应用开发的编程层次和接口。从而形成实时应用程序内部结构。
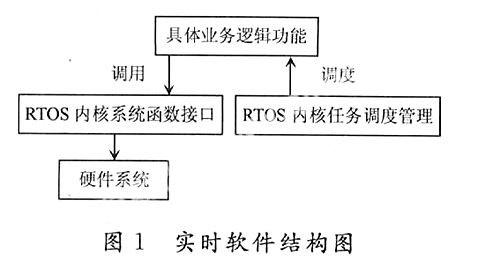
实现具体实时应用业务逻辑一般采用分解任务的方法。将一个实时应用功能划分为多个并发执行的任务。分配任务不同的优先级,赋予任务自主延迟功能,进行必要的任务通信,设置关键任务的中断响应。明确任务的执行条件、中断条件和挂起条件等因素。每个任务是系统中一个独立的执行调度单位和资源分配单位。如图1所示,调用RTOS内核系统函数接口,创建实时任务;任务的运行从接受内核调度开始,按照自身流程设计循环执行,直至系统运行结束。
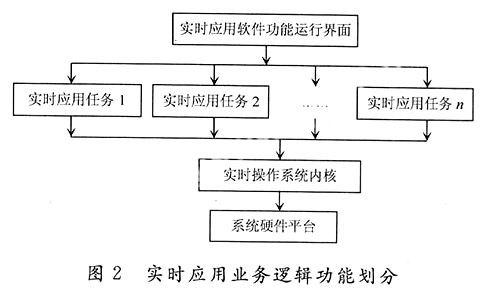
通过对实时应用功能划分及运行技术分析研究,总结出实时应用的基本构成单位和基本功能实现方法,如图2所示。
2 基于μC/OS Ⅱ内核的实时任务模型
μC/OS Ⅱ嵌入式操作系统是一个多任务、优先级抢占、可移植、可裁减的实时内核。具有时间、内存、信号量、邮箱和信息队列等各类功能函数,各任务间可以互相通讯,适用于小型CPU,开源代码简练,应用领域广泛。
μC/OS Ⅱ操作系统以系统函数形式提供各类管理功能,以任务为单位对应用代码进行管理。应用程序调用系统函数编码,并进行编译、链接、运行。应用代码与内核构成一个整体。实时软件编码的核心问题在于将应用软件的具体功能转化为系统中一个个并发执行的实时任务,接受操作系统内核调度程序的调度和管理,使应用功能最终实现。
基于μC/OS Ⅱ实时操作系统内核进行应用程序开发,首要的工作在于如何将应用程序中的功能进行模块分解,使每个模块转换为可并发执行的任务;调用内核完成任务流程的设计与实现;启动操作系统内核的任务调度程序,并发执行任务。
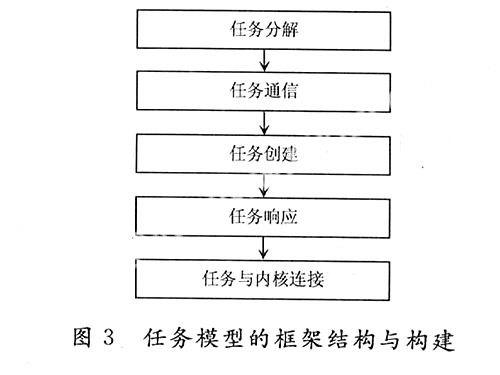
由于实时应用程序的开发既要考虑内核功能及接口,也要设计应用逻辑功能。设计一个任务模型,直接服务于实时应用程序的设计与实现。该模型对设计与实现的全过程进行简要分解,对各个环节进行功能设计与实现,引导用户将设计功能转换为应用程序。
图3提供了任务模型框架与构建基本步骤。
2.1 任务分解
任务分解是将一个实时应用业务逻辑,按照任务的管理和控制接口划分为若干独立的任务,并发运行,实现应用功能。简单地分为设计阶段和编码阶段。
2.1.1 设计阶段
(1) 根据应用程序功能需求,将应用程序功能划分为若干并发任务。首先将需要并发执行的子功能确立为任务,任务优先级按响应的迫切程度确定。
(2) 确定每个任务处理流程,确保完成任务功能。
(3) 确定任务功能实现是否与其他任务的执行有关联。
2.1.2 编码阶段
(1) 完成每个任务的程序设计。将任务流程使用C语言编写为独立的函数。根据应用需求,不同的任务也可共用同一个函数的代码段。
(2) 实时任务需确定优先级。为确保低优先级任务有机会运行,每个任务函数中需包括睡眠、挂起、等待指定时间等一些自主放弃CPU的语句,调用内核函数实现。
2.2 任务通信
实时任务间存在互相合作或竞争关系。μC/OS Ⅱ实时操作系统内核允许并发任务间通过事件、信号量、消息邮箱、消息队列进行通信。实现分为两步:定义通信事件数据类型及初始化;任务编码中适时调用发送和接收函数。
(1) 创建任务前,调用内核,定义需要的通信机制数据结构。
(2) 发送任务和接收任务调用内核任务通信函数实现编码,发送任务和接收任务可有多个。
2.3 任务创建
将编码完成的任务函数,通过调用内核函数,转换为内核可调度的任务。系统函数
INT8U OSTaskCreate (void (*task)(void *pd),void *pdata,OS_STK *ptos,INT8U prio)的输入数据为:任务代码指针——任务函数名;创建任务运行时传递的指针——可为空值;任务堆栈栈顶指针——任务现场数据;任务优先级——确定任务关键程度。
2.4 任务性能
为确保实时应用程序的实时特性,满足实时软件的性能需求,必须要求实时内核能够控制每个实时任务的响应时间和执行时间。
任务的响应时间可利用系统内部定时器计算,根据任务的执行顺序,在起始任务开启定时器,在结束任务停止计时,经反复调试,可以测定实时任务的响应时间,一般设为计时最大值,可为确定任务抢占延迟时间提供直接数据。
任务执行时间的测定方法类似。在任务执行代码起始位置开启定时器;在一个任务周期结束时停止计时。反复调试,测得的最大值计为任务的执行时间,又为一个任务最长的一个执行周期,也为控制单个任务功能的执行提供依据。
2.5 任务与μC/OS Ⅱ实时内核连接
实时应用程序主函数是整个应用程序的执行入口。该函数将应用代码和操作系统内核代码进行连接,形成一个完整的应用代码。主函数一般由以下步骤组成,μC/OS Ⅱ内核均提供系统函数支持。
(1) 初始化μC/OS Ⅱ操作系统内核;
(2) 保存DOS环境;
(3) 安装μC/OS Ⅱ中断等环境参数;
(4) 根据需要创建信号量集;
(5) 创建多个应用程序任务;
(6) 启动多任务管理(任务调度程序)运行。
3 μC/OS Ⅱ实时任务模型的应用
交通信号灯控制系统是一个常见的实时应用系统。该系统根据时间控制十字路口信号灯的自动转换,其基本功能具有实时系统的基本特点。应用实时任务模型进行该系统的设计与实现。
3.1 系统功能、任务分解、任务通信
(1) 应用程序功能说明
十字路口交通信号灯控制十字路口的车辆通过或停止。篇幅所限,控制方式简述如下:东西向绿灯亮时,南北向红灯亮,反之亦然,车辆按同方向灯控制通过。
(2) 任务分解说明
设置两个任务分别表示东西向灯task_ew和南北向灯task_sn。东西向灯任务和南北向灯任务优先级不同。东西向灯任务功能:申请南北向灯任务的同步信号量s_sn,显示绿灯指定时间,设定显示红灯指定时间,向南北任务发送同步信号量;南北向灯任务功能:申请东西向灯任务的同步信号量s_ew,显示绿灯指定时间,设定显示红灯指定时间,向东西向任务发送同步信号量;两个任务通过两个信号量保持同步切换机制。
(3) 任务间通信
根据任务分解得知,创建两个信号量,南北向灯信号量s_sn,初值=1;东西向灯信号量s_ew,初值=0。这样,通过任务代码申请信号量的顺序,可以将十字路口信号灯控制为如下顺序和变化周期:东西向信号灯绿灯→东西向信号灯红灯→南北向信号灯绿灯→南北向信号灯红灯。
(4) 任务代码
东西向灯任务代码task_ew()简要流程如下,以下代码为无限循环代码。
① 调用内核系统函数申请南北向灯信号量;
② 东西向显示绿灯,南北向显示红灯;
③ 调用内核函数,任务睡眠指定时间;
④ 调用内核系统函数发送东西向灯信号量。
南北向灯任务代码task_sn()简要流程如下:以下代码为无限循环代码。
① 调用内核系统函数申请东西向灯信号量;
② 南北向显示绿灯,东西向显示红灯;
③ 调用内核函数,任务睡眠指定时间;
④ 调用内核系统函数发送南北向灯信号量。
3.2 任务创建
(1) 任务函数代码编码完成后,调用系统函数OSTaskCreate()创建任务task_sn和task_ew。
(2) 每个应用任务的优先级不同,为了使任务按照设定的时间进行红绿灯显示切换,每个任务自动设定睡眠若干时间,任务在睡眠状态下显示状态保持不变。
3.3 任务与μC/OS Ⅱ实时内核连接
应用程序主函数的主要流程设计如下:
OSInit();
PC_DOSSaveReturn();
PC_VectSet(uCOS,OSCtxSw);
task_sn = OSSemCreate(1);task_ew= OSSemCreate(0);
OSTaskCreate (task_sn,&TasksnData;,TasksnStk[TASK_STK_SIZE - 1],30);
OSTaskCreate (task_ew,&TaskewData;,TasksnStk[TASK_STK_SIZE - 1],35);
OSStart();
3.4 实时任务性能指标
若该应用系统具有信号灯自动控制改为手动控制,再由手动改为自动控制功能,需要进行如下设计:
(1) 中断延迟
设置一个实时任务代表手动控制状态。当按下按键时产生中断,中断事件必须在时限内处理,睡眠上述两个红绿灯任务,将执行切换到手动实时任务。当需要切换到自动状态时,按下对应按键时产生中断,处理该中断,睡眠手动实时任务,唤醒两个红绿灯任务。这两个中断延迟时间对信号灯控制系统是很重要的性能指标,直接影响路口控制方式的切换是否顺畅。
(2) 抢占延迟
有时根据交通流量变化,需要调整十字路口双方向红绿灯的切换时间。设置一个时间调整任务,该任务优先级较高,可根据每星期各天、各时段路口情况进行周期性动态时间调整。按指定时间触发事件,调度该任务执行。事件产生的频度就确定了该任务的执行时限,因此每次事件发生时,相应的处理任务必须及时响应处理,否则不满足时限要求,路口将陷于无控
制状态。抢占延迟就反映了系统的响应及时程度。
4 结 语
提出的根据实时任务模型构建实时应用程序的方法,为基于嵌入式实时内核μC/OS Ⅱ构建应用程序,提供了一个简明、方便的技术思路和实现方法,该模型为实时应用程序开发提供一个实用解决方案。从应用程序范例的设计实现可得到随应用系统需求的改变;实时任务可动态进行增删;模块可拆卸。该方案已在我校计算机学院的教学实践中使用,具有较好的可操作性,开拓了软件开发的新视角。
参考文献
[1]王苏峰,肖侬,唐玉华,等.嵌入式系统的多样性教学探讨.计算机教育,2008(14):53-54.
[2]杜承烈,谭峰.一种面向环境可配置嵌入式系统软件模型研究.计算机应用研究,2008,25(8):2 369-2 370,2 398.
[3]王宜怀,刘晓升.嵌入式系统——使用HCS12微控制器的设计与应用.北京:北京航空航天大学出版社,2008.
[4]Jean J Labrosse.嵌入式实时操作系统μC/OS Ⅱ.北京:北京航空航天大学出版社,2005.
[5]戴亮,戴胜华.μC/OS Ⅱ实时性能测试与研究.单片机与嵌入式系统应用,2007(7):5-7.
[6]宋凯,甘岚,严丽平,等,嵌入式Linux内核实时性研究及改进.微计算机信息,2008,23(24):16-18.
[7]Wayne Wolf.High-performance Embedded Computing.北京:机械工业出版社,2007.
[8]Judit Bar-Ilan ,Tatyana Gutman.How to Search Engines Respond to Some Non-English Queries .Journal Information Science,2005,31(1):13-28.
[9]刘良华.教育研究方法专题与案例.上海:华东师范大学出版社,2007.
[10]康一梅.嵌入式软件设计.北京:机械工业出版社,2008.
作者简介 牛欣源 女,1965年出生,黑龙江哈尔滨市人,工学学士,讲师。研究方向为操作系统软件技术、程序设计方法。
孟庆昌 男,1945年出生,河北人,学士,教授。研究方向为操作系统理论与技术,软件技术。