
时载波相位差分GPS技术在公路测量作业中的应用研究
2009-06-12 09:46林建军卓鑫
中国新技术新产品 2009年9期
关键词:GPS技术
林建军 卓 鑫
摘要: 时载波相位差分(RTK)作业模式能实时地给出厘米级精度的点位坐标,解决了当前公路测量中许多常规方法无法解决的技术问题,因此,在公路勘测中得到广泛使用。笔者结合自身工作实际分析了GPS RTK系统的工作原理,并重点对RTK的作业方式进行了研究和探讨。
关键词:RTK;GPS技术;作业方式
1 引言
传统的公路勘测工作辛苦且繁琐,存在着勘测周期长、工作效率低等诸多问题。最大限度地减轻公路勘测工作量、提高公路勘测效率和勘测精度,一直是公路勘测工作者孜孜以求的目标。目前,GPS技术的发展为公路勘测技术的腾飞奠定了坚实的基础。在现代公路勘测中,定测阶段和施工阶段主要是利用GPS实时动态载波相位差分定位技术来完成传统测量方法中的图根加密控制、像控点测定、带状图测绘以及施工放样测量等工作,并在统一坐标系下提供点位的三维数据信息。
2 GPS RTK 系统的工作原理
RTK系统主要由一个参考站(即基准站)、若干个流动站、数据通讯系统3大部分组成。基准站包括:GPS接收机、GPS天线、无线电通讯发射设备、电源、基准站控制器等设备。流动站的基本配置是:GPS天线、GPS接收机、无线电通讯接收设备、电源、流动站控制器。RTK系统的工作原理见图1:
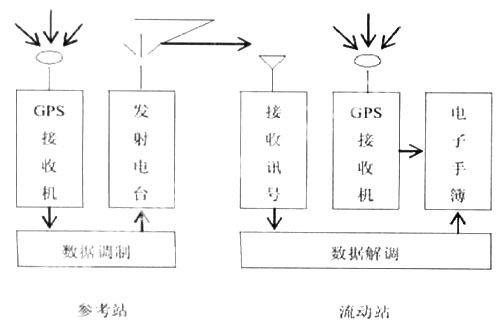
RTK测量时,基准站将接收到的所有卫星信息及其基准站信息一起由通讯系统传送给各流动站。各流动站在接收卫星数据的同时还接收基准站传送的信息,当流动站完成初始化土作后,控制器即可根据接收到的信息实时计算并显示出流动站的点位坐标。RTK系统之所以能快速定位并且能进行动态初始化,是因为系统采用了动态快速求解整周模糊度AROF技术。这一技术使人们摆脱了高精度GPS载波相位测量中必须以解算整周求知数为目的的初始化问题,以及动态测量中必须始终保持4颗以上卫星的连续锁定的难题。优质高效的数据传输技术也是RTK技术实现的关键。RTK要求基准站与各流动站之间通过建立数据通讯链来实现基准站信息(数据)向流动站的实时传输,并能对传输的数据进行正确编码和同步检错。为保证数据传输的准确与实时,必须综合考虑传输格式、传输频率、传输距离、传输数据量等诸多因素。
3 公路RTK系统的作业方式
RTK测量能实时地给出厘米级的点位三维坐标,从而解决了许多常规方法无法解决的技术问题。如公路施工中的三维实时动态放样,可以使勘测人员逐步摆脱先控制后加密再测图及手工操作的落后局面,实现一步法自动化数字化测图,这将显著提高劳动生产率。而且因为流动站可以直接掌握参考站的进程和测点精度状况及可靠性指标,避免了测后返工问题,可以进一步缩短外业观测时间。RTK系统的作业方式非常灵活。基准站采用静态作业模式,可以安置在已知点上,也可以安置在待定点上。流动站采用动态作业模式,可以处于静止状态,也可以处于运动状态。可在一固定点上先进行静态初始化再进行动态作业,也可在动态条件下直接开机,并在动态环境下完成整周模糊度的搜索求解。
3.1 不同起算条件下的RTK作业方式
在进行公路RTK测量时,起算点的已有坐标数据情况往往不尽相同。有的已知点可能同时具有WGS-84世界大地坐标系坐标和80坐标或54坐标,可以求解两系统坐标转换参数,而大多数的已知点可能只具有80坐标或54坐标,还不能直接求解坐标转换参数。特殊情况下也可能待定点只需要84坐标即可。因此在具体作业方式上会有所不同。
对于已知点同时具有84坐标和80坐标或54坐标的公路项目,可以在RTK系统中直接输入已知点的两套坐标,选用合适的坐标转换模型,通过公共点匹配求解坐标转换参数,检验合格后保存采用。此时要求基准站必须安置在已知点上,而且应输入已有的84坐标,以保证84坐标的一致性;流动站比较灵活,可以直接到待定点上流动观测,也可以先到个别已知点或已测点上进行检核测量,以核对坐标转换参数的正确性。对于已经布设GPS控制网的公路项目,一般都可以按此种作业方式进行。
对于已知点仅具有80坐标或54坐标的公路项目,必须先测定已知点的84坐标,为求解坐标转换参数所用。此时要求基准站可以安置在已知点上,也可以安置在待定点上,甚至可以安置在临时一点上,但都必须先进行单点定位,测定基准站的84坐标,一般取10分钟的观测数据即可。而流动站必须先到已知点进行流动观测,获取所有已知点的84坐标,然后同样在RTK系统内通过公共点匹配求解坐标转换参数。有了转换参数就可以到待定点上依次观测了。对于没有布设GPS控制网的公路项目,一般都需要按此种作业方式进行。
对于待定点只需要84坐标的这一情形,此时基准站和流动站直接采用WGS-84坐标系统,而无需对坐标系统进行处理。由于基准站的安置都具有一定的可选性,因此应尽可能的满足以下几方面的要求:(1)点位周围没有明显的障碍物和电磁信号干扰物,以有利于卫星信号的接收。(2)点位所在地地势较高,最好是制高点上,以有利于数据信号的传送。(3)点位附近充电较方便,以确保基准站连续用电的特殊需要。(4)点位相对于待测区域位置适中,有利于作业半径的覆盖。
3.2 不同坐标系统下的RTK作业方式
进行RTK测量主要是充分利用它具有的快速定位和实时放样两大功能。在大多数情况下,只有点位放样才真正需要实时测定,而快速定位并不都是需要实时提供坐标,也就是说可以通过后处理提供点位坐标。因此在作业方式上我们完全可以根据公路项目对测量成果需求的紧迫程度,优化设计 RTK测量的作业方式,以达到尽可能缩短外业观测时间,真正提高作业效率。
(1)在国家坐标系统下的RTK作业方式
所谓在国家1980或1954坐标系统下的RTK作业方式。这种作业方式才是真正息义上的实时提供国家坐标系统下的点位坐标,主要工作也都是外业完成。它要求测区具有坐标转换参数或者能够实时求定转换参数。该作业方式主要用于真正需要实时提供点位坐标的公路项目如施工放样等。
(2)在WGS-84坐标系统下的RTK作业方式
WGS-84坐标系统下的RTK作业方式,是指RTK外业测量中无需考虑坐标转换参数而直接实时提供84坐标,通过内业后处理提供国家坐标的一种作业方式。这种作业方式的最大特点是:不必为求定坐标转换参数而必须提前进行已知点联测,而只需在测定待定点时顺便联测已知点。尤其是对于线路较长的公路RTK测量,无需实时提供国家坐标时,按此作业方式可以大大减少外业工作量。
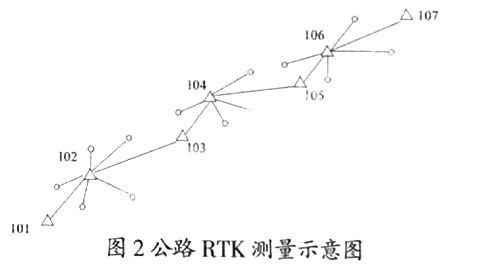
图2 为某公路道路改造时RTK测量测量示意图,路线全长约70km,为了测绘1:2000带状地形图,采用GPS RTK技术测定180个二级控制点。全线已有7个四等GPS控制点,坐标成果属于北京坐标系,可作为RTK测量的起算点。但已知点相距较远,平均点距约1Okm,如果采用在国家坐标系统下的RTK作业方式,为了求定坐标转换参数,一方面流动站要首先跑遍所有已知点,另一方面基准站要顾及作业半径,需要迁站2-3次,影响外业工作效率。为此,采取了在WGS-84坐标系统下的RTK作业方式,54坐标成果由内业后处理提供。采用Leica GPS530系统进行RTK观测,选择102,104,106为基准站,作业半径可达10km,其它已知点纳入到星状网联测中。结果外业只用了3天,比其它作业方式节省1-2天,内业仅增加1-2天,在不影响提交成果的前提下,大大减少了外业的测量经费,优化
了RTK测量方案。
参考文献
[1]张予东,公路测量中GPS RTK的应用,测绘通报,2002
[2]石桥,GPS RTK技术在公路勘测中的应用,交通科技,2004
