
铰链四杆机构的运动特性分析
2010-01-15 06:11潘纹
办公自动化 2010年22期
潘纹
(黄冈职业技术学院 黄冈 438002)
铰链四杆机构的运动特性分析
潘纹
(黄冈职业技术学院 黄冈 438002)
铰链四杆机构不仅本身应用广泛,而且是平面四杆机构、多杆机构的基础,同时为以后如凸轮等机构的学习打下必要的基础。因此,我们要去了解、分析铰链四杆机构的运动特性。
铰链四杆机构 双曲柄机构 曲柄摇杆机构 双摇杆机构
一、引言
机构是由构件组成的系统,其功用是传递运动和动力。为使机构实现传递运动的功能,必须正确地分析和确定机构中各构件之间的相互关系;为使机构实现传递动力的功能,必须正确分析机构中各构件的受力情况。平面连杆机构是平面机构的一种,是由若干个构件通过低副连接的机构,又称平面低副机构。而在平面连杆机构中广泛应用四杆机构。只有在实现某些特殊要求时才用多杆机构,例如要求输出杆有放大作用,或有更好的传力作用和更佳的传动角,在固定铰链间有特定的大中心距用二自由度以上的函数或轨迹综合机构等。
二、铰链四杆机构的组成、类型及应用
1、铰链四杆机构的组成
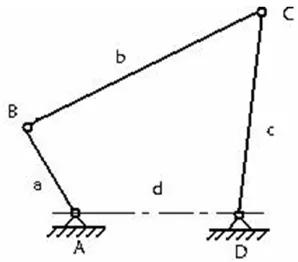
在平面四杆机构中,若全部运动副都是转动副,则称为铰链四杆机构,如图所示的曲柄摇杆机构就是其中的一种形式。图中杆d固定不动,称为机架,杆b称为连杆。杆a和杆c分别用转动副与连杆b和机架d相连接,称为连架杆。连架杆中能作360度转动的杆称为曲柄,对应的转动副A称为整转动副,在运动简图中用单向圆弧箭头表示;若仅能在小于360度范围内摆动,则称为摇杆,对应的转动副D称为摆动副,在运动简图中用双向圆弧箭头表示。曲柄以整转副,摇杆以摆动副分别与机架、连杆联接。
2、铰链四杆机构的类型及应用
按连架杆中是否有曲柄,可将铰链四杆机构分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本形式。
(1)曲柄摇杆机构
一个连架杆为曲柄,另一个连架杆为摇杆的铰链四杆机构称为曲柄摇杆机构。
(2)双曲柄机构
若铰链四杆机构两个连架杆都是曲柄,则称为双曲柄机构。其运动特点是:当主动曲柄作匀速转动时,从动曲柄作周期性的变速运动,以满足机器的要求。
在双曲柄机构中,若两曲柄长度相等,同时连杆与机架长度也相等,则称此双曲柄机构为平行双曲柄机构。两曲柄转向相同时,转速相同,连杆与机架始终保持平行,故又称平行四边行机构。
平行四边形机构在运动过程中,会出现曲柄与机架共线时四个铰链中心处于同一直线的问题,此位置会产生运动的不确定性。工程上可利用从动件的质量或在从动件上加装飞轮以增大惯性,达到消除运动不确定性的目的。
(3)双摇杆机构
在双摇杆机构中,若两个摇杆长度相等,则称为等腰梯形机构。
三、铰链四杆机构的运动、传力特性
改平面连杆机构不仅要考虑其运动要求,以实现预定的运动规律或运动轨迹,还必须希望传力性能良好,以使机构运转轻便、高效。
1、压力角
将驱动力F分解为两个相互垂直的分力,即沿点C速度方向Vc的分力Ft和摇杆CD方向的分力Fn,有

显然,在驱动力F一定时,压力角a越小,有效分力Ft就越大,有害分力Fn就越小,对机构的传动越有利,传动效率越高。压力角a可用来表示连杆机构的传力性能。
2、传动角
压力角a的余角称为传动角,用r表示。传动角r与压力角a的关系如下:

传动角r就是连杆和摇杆之间所夹的锐角。传动角r越大,机构的传力性能就越好。反之,传动角r越小,机构传力效率低,费力。所以,传动角r与压力角a都是反映传力性能的参数,但传动角r测量和观察更方便。因此,工程中常用传动角r的大小来衡量机构的传力性能。
在机构运动过程中,r也随机构位置变化而变化。为了保证机构具有良好的传力性能而正常工作,必须规定机构的最小传动角rmin不小于许用传动角[r],即

3、机构的死点位置
当机构的连杆与从动件拉直或重叠共线时,从动件的传动角γ=0°(压力角αmax=90°),推动力对从动件的有效回转力矩为零,这样的位置称为机构的死点位置。
由式(2-1)可知,有效驱动力 Ft=Fsinα =Fcos90°=0;有害分力Fn=Fsinα=Fsin 90°=F,即经连杆传给从动曲柄的力全部通过其两端铰链。此位置为死点位置,无论连杆BC对对曲柄AB的作用力有多大,都不能使之转动而出现“顶死”现象,机构处于静止状态。该曲柄摇杆机构,若曲柄作主动件,从动摇杆与连杆不可能出现共线,故无死点位置。可见,同一个机构有无死点位置,与其主动件的选取有关。
判断四杆机构中是否存在死点位置,决定于从动件是否与连杆共线。若从动件是作整周转动的曲轴,则在它的每一个整周转动中将出现两个死点位置。
对于传动机构,死点位置会使机构的从动件出现“顶死”或运动不确定现象,应消除死点位置的影响,设法避免或顺利通过死点位置。工程上可采取多组相同机构错位排列的方法,即将各组结构的死点位置错开。
4、急回特性
图1所示的曲柄摇杆机构中,当曲柄AB为原动件并作等速回转时,摇杆CD为从动件并作往复变速摆动,曲柄AB在回转一周的过程中有两次与连杆BC共线。这时摇杆CD分别处于左右两个极限位置C1D、C2D。此两极限位置时曲柄所在直线之间所夹的锐角θ称为极位夹角。

图1 曲柄摇杆机构的极位夹角

四、结语
四杆机构的急回特性可以节省空回时间,提高生产率。让更多的人去了解铰链四杆机构的类型与特性,及铰链四杆机构在生活、工业中的广泛应用。
[1]倪森寿主编.机械基础[M].北京:高等教育出版社,2002.9.
[2]黄泽森等编.机械设计基础[M].北京:北京大学出版社,2008.7.
[3]刘孝民主编.机械设计基础[M].广州:华南理工出版社,2006.3.
Analyzing The Characteristic Movementof Four BarMechanism
PanW en
(Huanggang Polytechnic College Huangang 438002)
Since Hinge four organization notonly one'sown application extensive,butalso level fourorganization,many pole foundation oforganization,lay an essential foundation for the study of the organization such as cam at the same time.So,wewillunderstand,analyze fourmovementcharacteristics in organization ofhinge.
Hinge fourorganization、pairsofcrank organization、crank rockerorganization、pairsof rockerorganization
TH112
B
101011-5560
潘 纹 (1973~),女,湖北黄冈人,副教授,硕士研究生。研究方向:机电一体化、制造业信息化。
猜你喜欢
机械科学与技术(2022年8期)2022-08-30
大型铸锻件(2022年1期)2022-02-12
科技创新与品牌(2020年5期)2020-06-15
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
科技与创新(2019年17期)2019-09-21
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
世界博览(2017年1期)2017-04-19
科技视界(2016年27期)2017-03-14
CHIP新电脑(2014年5期)2014-05-14

- 办公自动化的其它文章
- 配件仓储管理系统的设计与开发