DSP电力机车微机控制系统的设计
2010-01-18 06:43廖宇,郭黎,郭强
湖北民族大学学报(自然科学版) 2010年2期
廖 宇,郭 黎,郭 强
(湖北民族学院 信息工程学院,湖北 恩施 445000)
国产交直传动电力机车的控制系统经历了有接点控制、模拟控制和微机控制3个发展阶段[1].目前在微机控制的交直传动电力机车家族中已有8种车型:SS8、SS4B、TM1、SS9、DDJ1、春城号动车组、SS7D和SS7E.其中除SS4B型机车用于货运外,其余都为客运电力机车.本文设计的微机控制系统具有通用性、灵活性、重现性、可靠性和智能性等特点.微机控制的硬件是通用于多种交直传动的机车,有些功能虽然在某个型号机车上不需要,但也保留.这样的优点是便于从一种车型移植推广到另一种车型,而且易于适应设计过程中新增加的控制要求[2].
1 系统总体结构
国产电力机车微机控制系统由处理器、数字入出、电机信号、信号调整、脉冲放大、转换控制、开关电源、功补控制等8块插件组成,系统框图如图1所示.其基本工作原理是:数字入出插件负责将110V的开关信号转换为5V的电平信号.信号调整插件对司机给定指令、速度脉冲、原边网压等信号进行调整,来自机车主电路的各传感器及司机控制器电位器的电压型或电流型信号,通过信号调整插件调整成微机适宜的采样范围内的信号.处理器(CPU)插件则从数字入出转换的电平信号读取工况,如牵引、制动、操作端等,从而判定工况的构成;从信号调整插件、电机信号插件通过处理器插件上的模/数(A/D)转换通道读取各模拟量的值,根据工况和某种车型的特性计算公式计算出当前所需的电枢电流IS_MOD,再经过轴重转移补偿、最大牵引(制动)电流限制、牵引(制动)限制曲线等环节计算出两架的电流给定值IS1、IS2.再经过软件的防空转/滑行环节计算出两架实际的电枢电流值ISS1、ISS2.然后进入牵引(制动)的调节环节,与反馈的电机电流、电机电压、励磁电流等通过比例积分环节计算出两架的三段桥及励磁桥的移相电压值Ue1、Ue2、Ue3、Ue4.CPLD产生的脉冲序列输出至脉冲放大插件,再由脉冲放大插件进行功率放大生成各桥的触发脉冲,经脉冲放大插件放大后由转换控制插件输出触发脉冲至硅机组,控制各晶闸管的通断[3].下面将侧重阐述处理器插件的设计方法.
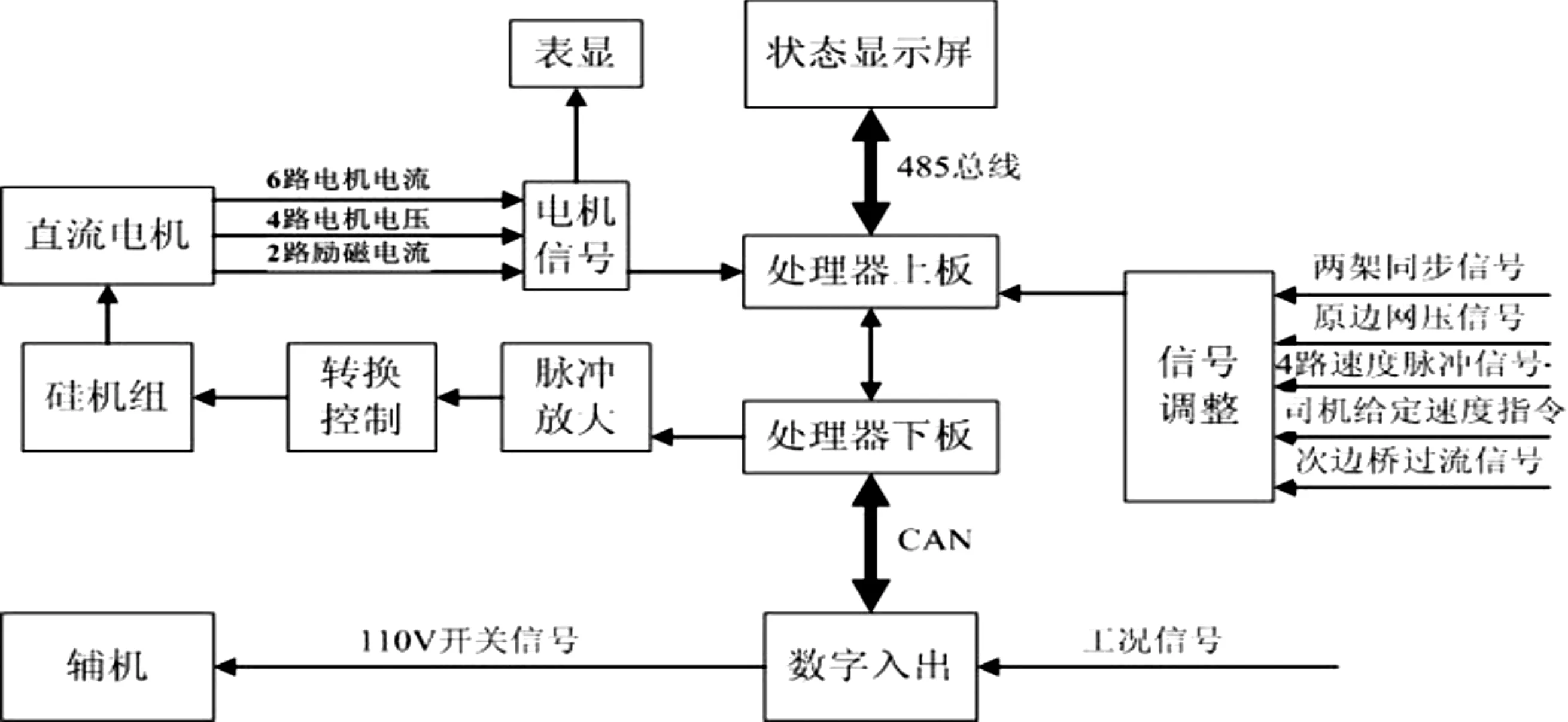
图1 系统框图
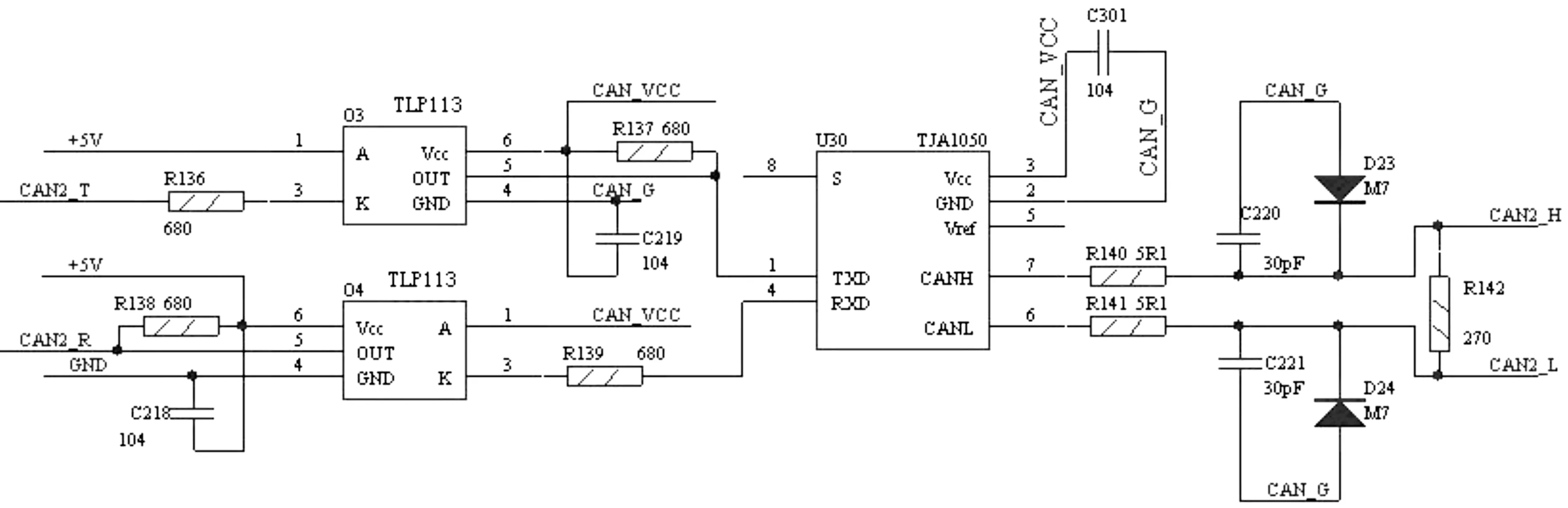
图2 CAN通信模块
2 处理器插件的设计
图1中,处理器插件分上板和下板,上板、下板通过两排40针插针进行数据交换.上板可分为5个模块:DSP数据采集模块、CPLD模块、CAN通信模块、A/D转换模块、电源调理模块.下板可分为7个模块:DSP数据分析模块、CPLD脉冲形成模块、D/A转换模块、DSP供电模块、CAN通信模块、波形处理模块、电源调理模块.其工作流程是:上板实现32路模拟量的模数转换,16路TTL数字量输入,速度传感器工作指示,并且与MVB网卡进行通讯,将微机柜的相关数据发送给中央控制单元(CCU),并接收中央控制单元发送来的各种数据,同时将所有数据写入双口RAM,以送入下板进行处理.
CAN通信模块中的CAN收发器采用TJA1050.TJA1050是CAN协议控制器和物理总线之间的接口,可以为总线提供不同的发送性能,为CAN控制器提供不同的接收性能[4].为了增加系统的抗干扰能力,在DSP的CAN外设接口和TJA1050之间接有光电耦合器件TLP113以实现电气隔离[5].CAN通信接口电路如图2所示.
RS-485通信模块借助DSP的串口和差动总线收发器SN75176实现微机柜与司机台上机车彩屏的串行通信[6].变流控制级完成对正弦波信号的处理得到网压过零信号、桥释放信号、网压积分信号、触发信号等.整个控制过程是通过下板来完成的,下板是处理器插件的核心部分,主要功能是从双口RAM中读取司机指令、机车速度、电机电流、电机电压等参数[7];根据机车的工况进行特性运算、粘着控制、脉冲形成、数字量输出、网压取绝对值、网压积分等.脉冲的生成采用CPLD元件,简化了电路,提高系统稳定性[8].电路原理如图3所示.正弦同步信号是由接在机车主变压器二次侧的同步变压器送出的,与网压同相.峰值8 V对应网压有效值25 kV.正弦同步信号经过一个由运算放大器、电阻、电容组成的50Hz带通滤波器,滤除纹波后,再经过一个迟滞比较器,变换成峰值为5 V,频率为50 Hz的方波同步信号,从CPU的一个高速输入通道输入,作为CPU判断网压过零点的基准.CPU在过零点发出网压积分信号和过零点封锁信号.网压积分控制信号除了本级使用,还传至性能控制级SBC,作为该级对电机参数如电枢电流、励磁电流等反馈信号进行采样和保持的同步基准[9].正弦同步信号的另一路产生网压积分信号.网压积分峰值UF经A/D转换芯片ADS774转换输至CPU,同时网压积分还与CPU产生的触发角控制量Ue相比较产生对CPU的外部中断请求,而外部中断的任务之一就是发强出发脉冲,因此网压积分与Ue相比较后实际上就确定了触发脉冲开试点,即确定了控制角α.其实际测试波形如图4所示.

图3 波形处理模块

100 Hz正弦半波 峰-峰值5 V,50 Hz方波同步信号 50 Hz PWM桥释放信号 网压积分信号
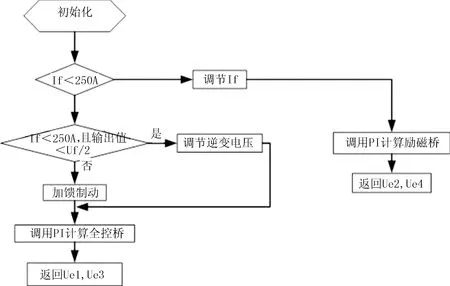
图5 制动流程图
处理器插件中的核心处理器采用2片TI公司的DSP芯片TMS320F2812,建立一个快速、功能强大和通用性能好的双DSP数据处理控制系统[10].
3 微机控制系统软件的设计
在软件上板主要完成机车的四大功能,特性控制功能、防空转/滑行功能、轴重转移功能以及自动过分相功能.脉冲的生成采用CPLD元件,简化了电路,提高系统稳定性.处理器下板的软件由主程序、初始化程序、牵引励磁程序、制动程序、CAN通信中断程序、串行通信中断程序等子程序组成.其中初始化程序主要完成相关外围器件的初始值和工作方式的设置;CAN通信中断程序主要完成工况信息的收发.串行通信中断程序完成微机柜与机车彩显串行数据的发送与接收任务.主程序主要实现电力机车的特性控制、防空转/滑行等.由于程序较多,在此只拿出制动程序为例给出相应流程图如图5所示.
4 结束语
电力机车微机控制系统的设计结合了现代控制技术、电力电子技术、EDA技术及贴片技术,并广泛采用大规模集成电路、可编程器件,具有可靠性高、抗干扰能力强、便于升级改造、成本低廉等突出优点,适合在国产各类型电力机车上推广使用[10].实践应用证明,该电力机车微机控制系统容易向其他车型移植,因此具有广阔的市场前景.
[1]王建设.电力机车PLC控制装置的研制[J]. 郑铁科技通讯,2007(3):14-16.
[2]严云升.国产交直传动电力机车微机控制技术的发展[J].电力机车与城轨车辆,2003(1):1-4.
[3]孙传胜.SS_(7C)机车DC600V列车供电系统可靠性设计[J].铁道机车车辆,2009(3):19-21.
[4]李砾工.基于TCN的动车组微机控制单元设计[J].电力机车与城轨车辆,2006(3):27-29.
[5]Rudolf Schmidt.Report presenting the result of the locomotive interoperability demonstration and workshop proceedings[R].Simens,2004:24-26.
[6]冯龙,朱衡君.摆式列车技术的发展[J].铁道机车车辆,2005(1):23-26.
[7]辜承林,陈乔夫,熊永前.电机学(第2版)[M].武汉:华中科技大学出版社,2005:56-61.
[8]SteimelA,Bochum.Control of the Induction Machine in Traction[J].Eb,1998(12):361-369.
[9]杨向明.国外高速列车相关技术的研究动态简介[J].铁道机车车辆,2006(11):1-6.
[10]杨庆.基于VHDL与CPLD器件的FIR数字滤波器的设计[J].湖北民族学院学报:自然科学版,2005,23(1):66-68.
猜你喜欢
控制与信息技术(2021年3期)2021-07-22
铁道机车车辆(2021年3期)2021-07-12
减速顶与调速技术(2021年3期)2021-03-09
Computers Materials&Continua(2019年7期)2019-07-18
减速顶与调速技术(2018年2期)2018-11-09
现代工业经济和信息化(2016年19期)2016-05-17
电测与仪表(2016年12期)2016-04-11
中国现代医学杂志(2015年26期)2015-12-23
西藏科技(2015年10期)2015-09-26
焊接(2015年1期)2015-07-18