磁悬浮系统的变速趋近律滑模控制
2010-05-11 04:21陈卫兵茅靖峰
制造业自动化 2010年6期
陈卫兵,茅靖峰
(1. 南通职业大学,南通 226007 ;2. 南通大学,南通 226019)
磁悬浮系统的变速趋近律滑模控制
陈卫兵1,茅靖峰2
(1. 南通职业大学,南通 226007 ;2. 南通大学,南通 226019)
0 引言
磁悬浮系统是一个高度非线性,参数时变及开环不稳定的系统,传统的磁悬浮控制器设计方法是在系统平衡点附近局部线性化的基础之上,应用线性系统的方法来设计控制器[1,2]。但当磁悬浮系统在大范围承载力及工作气隙变动条件下工作时,传统的基于平衡点参数优化的PID控制器不易得到理想的控制效果。多种非线性控制方法如模糊PID控制[3]、反馈线性化技术[4]、鲁棒控制[5]、滑模控制[6]、神经网络方法[7]、后推控制[8]等被用来克服上述问题。
滑模控制(SMC)无需精确的对象模型,可根据系统当前的状态,以跃变的控制方式迫使系统沿设定的“滑动模态”运动。具有响应速度快、对参数及外加干扰不灵敏、控制器实现简单等优点[9,10]。但常规滑模控制信号的抖振特性,会导致悬浮体稳态悬浮时的位置振颤现象。本文应用指数趋近律结合一种与状态范数成比例的变速趋近律方法设计磁悬浮系统滑模控制器,目的是消弱控制输出信号的抖振,增强系统的动、静态性能。
1 数学建模
本文研究的单自由度磁悬浮系统的结构原理如图1所示。
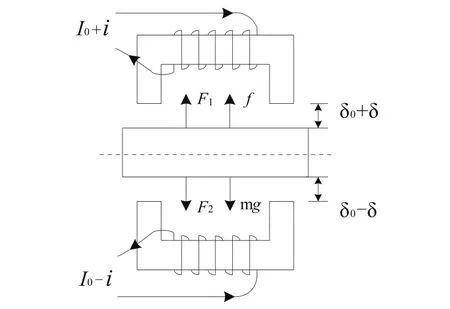
图1 单自由度磁悬浮系统结构原理图
图1中,悬浮体是质量为m(kg)的整体钢盘,置于两个电磁铁之间,当悬浮体处于平衡位置时,与上下电磁铁之间的气隙相等,均等于δ0(m)。设上下电磁铁的结构和参数完全一致,线圈匝数均为N,单磁极面积为A0(m2),采用电流叠加型差动驱动方式,初始偏置电流为I0(A)。则在只考虑气隙磁通均匀,忽略铁心磁阻、漏磁及涡流损耗等情况下,悬浮体受到的电磁合力可表述为
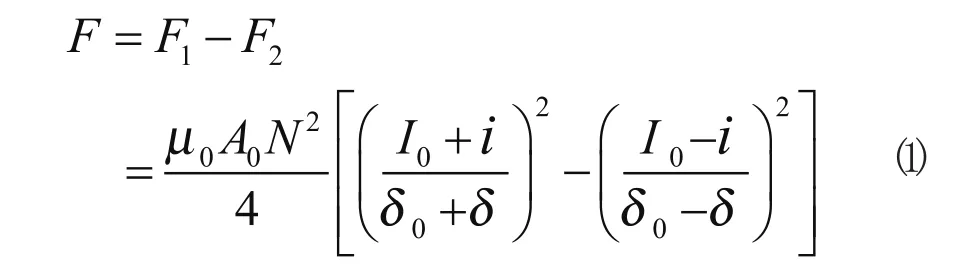
式中,F1、F2分别为上下电磁铁的电磁吸力;μ0=4π×10-7为真空中的磁导率;δ为悬浮体偏离平衡位置的位移量;i为电磁铁控制电流,i=Im+ic,Im为为克服悬浮体自重而加的初始平衡控制电流分量,ic为由δ引起的控制电流分量。
由图1可得悬浮体的运动力学方程为

式中,g=9.8m/s2;f为扰动力。
将式(1)在平衡位置δ=0和ic=0附近作泰勒展开,略去高阶无穷小量后,带入式(2)式可得悬浮体的近平衡点运动方程为

2 滑模控制器设计
滑模变结构控制器设计包括两个相对独立的步骤:设计切换函数s(x),使它所确定的滑动模态渐进稳定且具有良好的动态品质;设计控制律u±(x),使到达条件得到满足,从而在滑模面s(x)=0上形成滑动模态。
对于线性系统(4),选取线性切换函数

式中,c1>0为滑模面系数,决定最终滑模状态的品质。选取指数趋近律

式中,ε,k>0,k的作用是改善系统的动态品质,适当调节该参数能够改变系统向滑模面的趋近速度;符号函数的增益参数是系统克服摄动及外干扰的主要参数。
由式(5)和式(6)可解出变结构控制律
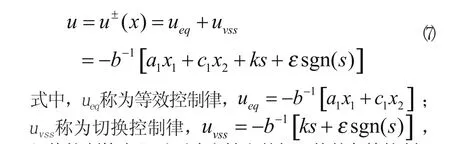
切换控制律实现对不确定性和外加干扰的鲁棒控制。选取Lyapunov函数

因此,对(5)式求导,并由(4)式和(7)式得
故,当取ε>max|df|时,变结构控制律(7)满足滑动模态的到达条件,能够驱使系统沿着滑模线s趋近于平衡原点。考虑到广义对象模型参数a、b和f随时间t的摄动,实际控制律ε参数应取足够大,以实现对外干扰和参数摄动的不变性。
显然,符号函数增益ε是系统克服摄动及外干扰的主要参数,ε越大,系统克服摄动和外干扰的能力就越强。但在增大ε的同时也导致了系统抖振幅度的加大。
为了消弱抖振,考虑变速趋近律[10,11]
变速趋近律(11)能够将系统引导到滑动模态上,并在系统状态轨迹向滑模面趋近过程中,||x||1的幅值逐渐衰减并很快趋向于零,最后使稳定于平衡原点。
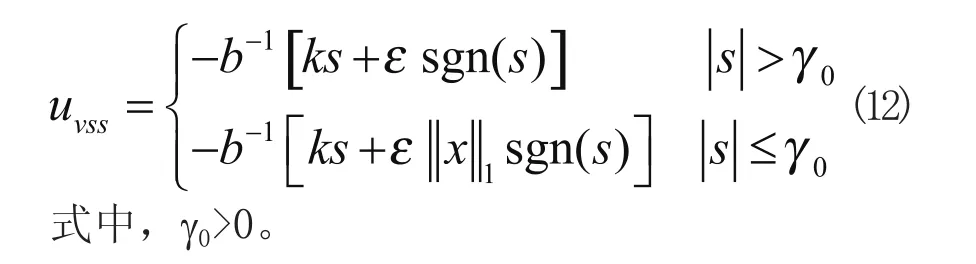
为了避免滑动模态初期,过大的||x||1产生大幅度的控制量抖振,变结构切换控制律uvss可选用指数形式趋近律和变速趋近律的组合形式[11]。即在滑模运动前期采用指数趋近律,在滑模运动后期和稳定阶段,采用变速趋近律,两种趋近律通过判别相迹点与滑模面的距离|s|进行切换。最终得出系统切换控制uvss的形式为
3 仿真实验
实验用磁悬浮系统的机械及电气参数如表1所示。
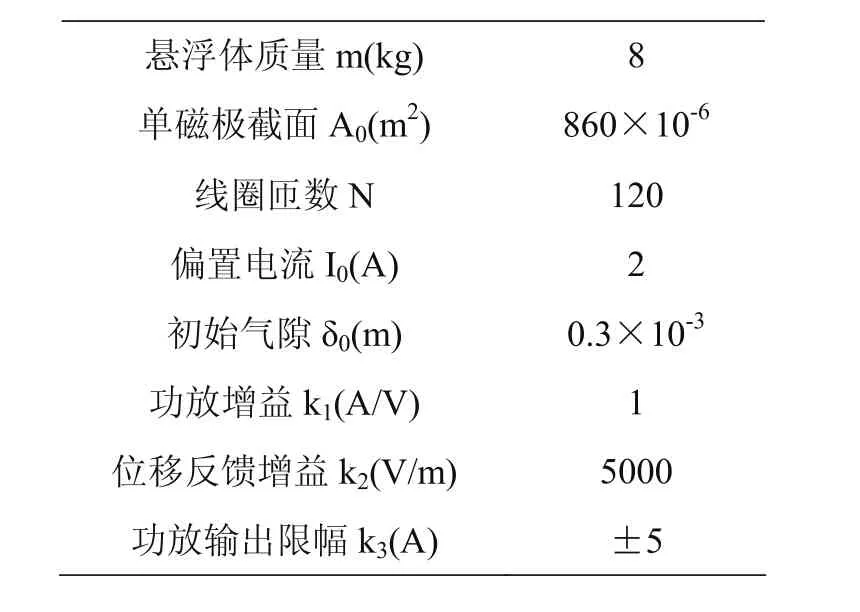
表1 磁悬浮系统参数
滑模控制器参数设计为:c1=400,k=800,ε=Fmax/m=86.4566,γ0=0.01。为了进行对比,设计了磁悬浮系统PID控制器,PID参数按照文献[2]给出的方法进行整定,其中选取闭环等效位移刚度kx=4kδ,阻尼比ζ=0.8,可计算得到Kp=6.6667,Td=0.0012s,Ti=0.016s。
图2、图3和图4分别为磁悬浮系统在PID、常规滑模和变速趋近律滑模控制下,磁悬浮系统空载起浮过程的位移响应曲线、控制量输出曲线和相轨迹曲线。
由图2可以看出,变速趋近律滑模控制和常规滑模控制均能使系统快速无超调起浮,动态性能优于PID控制。但在稳态区间,常规滑模控制较大的符号增益使系统控制量高频率大幅值抖动(见图3(b)),导致悬浮体在平衡位置上形成了幅值±1.3μm的位移振颤(见图2(b))。由图4可以看出,变速趋近律滑模控制的相轨迹快速收敛于原点,而常规滑模控制趋近于原点附近的抖振。
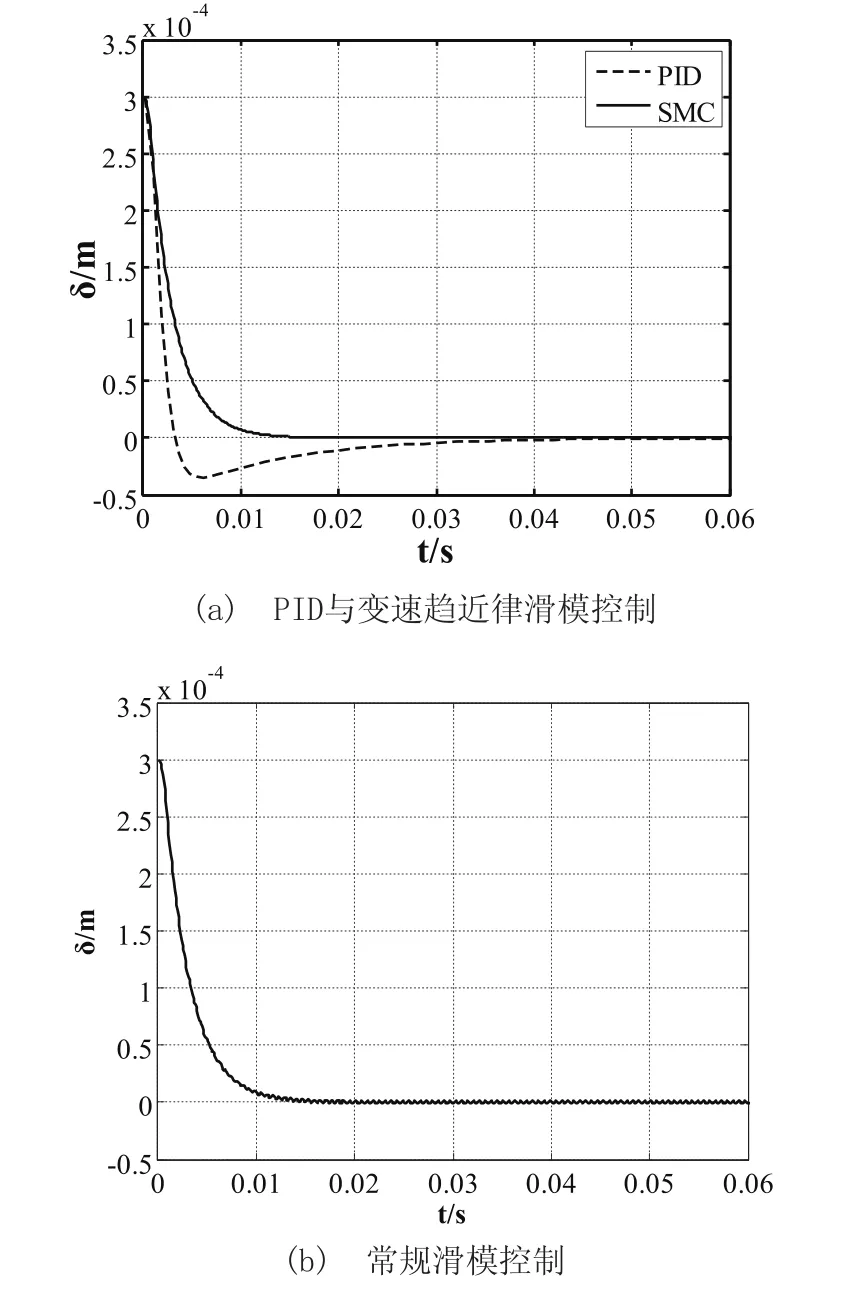
图2 空载起浮过程位移响应
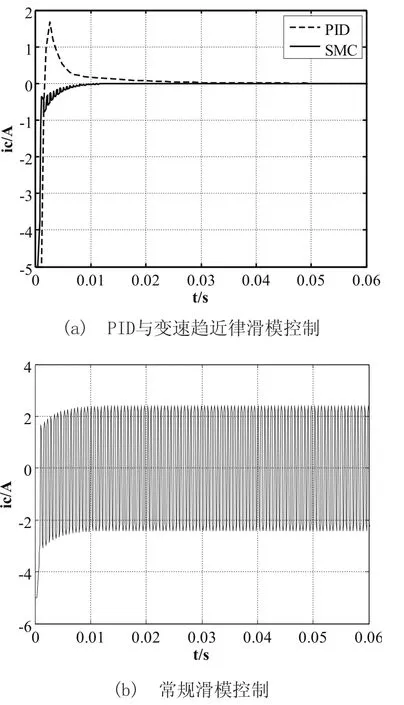
图3 空载起浮过程控制量输出

图4 空载起浮过程相轨迹
图5为磁悬浮系统在PID和变速趋近律滑模控制下,承载30kg负载条件下起浮过程的位移响应曲线。
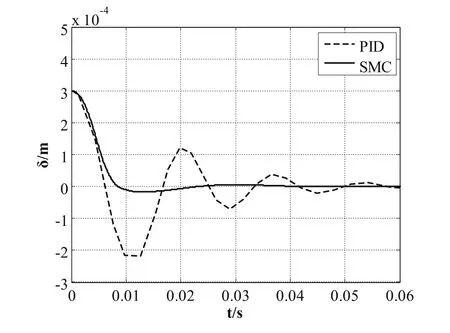
图5 负载起浮过程位移响应
由图5可以看出,变速趋近律滑模控制通过很好地把握位置跟踪偏差及其动态变化趋势,在系统参数发生很大变化的状况下,通过强非线性的控制量输出,使系统保证良好的动态调节特性,其鲁棒性能优于PID控制。
4 结论
本文设计了一种基于指数趋近律和变速趋近律相结合的磁悬浮系统滑模控制器。在滑模运动前期采用指数趋近律,在滑模运动后期和稳定阶段,采用变速趋近律,变速趋近律的符号函数增益与系统的状态范数成比例,使该滑模控制器在提高系统的鲁棒性能与降低抖振、保证稳态精度上具有良好的协调,稳态时,系统可稳定于原点。与传统PID控制相比,该滑模控制器具有更好的动静态性能和抗干扰能力。
[1]朱熀秋.无轴承电动机轴向磁轴承参数设计与控制系统研究[J].电工技术学报,2002,17(3):12-16.
[2]胡业发,周祖德,江征风.磁力轴承的基础理论与应用[M].北京:机械工业出版社,2006,
[3]Ma J,Fan W J,He F H. Parameters self-adjusting fuzzy PID control in magnetic levitation system[C].2nd International Symposium on Systems and Control in Aerospace and Astronautics,2008,1:1-5.
[4]Lindlau J D,Knospe C R.Feedback linearization of an active magnetic bearing with voltage control[J].IEEE Transactions on Control Systems Technology,2002,10(1):21-31.
[5]徐龙祥,张金淼,余同正.H∞控制理论在磁悬浮轴承系统中的应用研究[J].中国机械工程,2006,17(10):1060-1064.
[6]Lee J H,Allaire P E, Tao G, Decker J A, et al. Experimental study of sliding mode control for a benchmark magnetic bearing system and artificial heart pump suspension[J].IEEE Transactions on Control Systems Technology,2003,11(1):128-138.
[7]Lin F J,Teng L T,Shieh P H. Intelligent Sliding-Mode Control Using RBFN for Magnetic Levitation System[J].IEEE Transactions on Industrial Elect ronics,2007,54(3):1752-1762.
[8]Wai R J,Lee J D.Backstepping-based levitation control design for linear magnetic levitation rail system[J].IET Control Theory & Applications, 2008,2(1):72-86.
[9]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[10]姚琼荟,黄继起,吴汉松.变结构控制系统[M].重庆:重庆大学出版社,1997.
[11]宋立忠,姚琼荟,蔡汉强.离散变结构系统的组合控制策略研究[J].海军工程大学学报,2000,90(1):24-27.
Sliding mode control of magnetic levitation system based on variable rate reaching law
CHEN Wei-bing1, MAO Jing-feng2
为了抑制常规滑模控制在磁悬浮系统控制中的抖振问题,应用一种变速趋近律方法设计磁悬浮系统滑模控制器。控制器将系统的状态范数引入滑模控制律,以自动调整变结构切换控制项的增益,控制信号抖振幅值能够逐步衰减,并引导系统渐近稳定到原点;利用Lyapunov稳定性理论验证了系统的稳定性,并给出了控制器参数设计的依据;仿真实验结果表明,基于变速趋近律的磁悬浮系统滑模控制策略具有良好的动、静态性能和较强的鲁棒性。
磁悬浮系统;滑模控制;变速趋近律
陈卫兵(1966-),男,副教授,硕士,主要从事计算机工程和智能控制的教学和研究工作。
TH133;TP273
A
1009-0134(2010)06-0080-04
10.3969/j.issn.1009-0134.2010.06.28
2009-07-16
国家自然科学基金项目(60974049);江苏省高校自然科学研究项目(07KJD460176);南通市应用研究项目(K2008020);南通大学博士科研启动基金项目(09B06)
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
华人时刊(2021年19期)2021-03-08
华人时刊(2020年19期)2021-01-14
纺织报告(2020年9期)2020-12-18
语数外学习·初中版(2020年2期)2020-09-10
现代苏州(2019年16期)2019-09-27
军事文摘(2017年16期)2018-01-19
中国科技教育(2016年12期)2017-08-11
中国船检(2017年3期)2017-05-18