
复杂钢结构体高空吊装定位技术研究
2010-05-13 09:56陈科唐华罗家望
重庆建筑 2010年7期
陈科,唐华,罗家望
(1四川蜀渝石油建筑安装工程有限责任公司 四川江油 621709 2西科测绘公司 四川绵阳 621000)
1 概述
嘉峪关气象塔位于甘肃省嘉峪关市东湖风景区,由裙楼和混凝土核心筒塔楼组成,塔楼外环绕钢结构“海豚”造型网壳。网壳总高度为95m,由2731根直径18~24cm的钢管对径焊接而成。网壳以24根竖杆为造型主体,竖杆之间连接横杆和斜杆,以空中折线状的钢管构成海豚造型。每一根竖杆由35段直伸钢管对口焊接而成,每段钢管构成为网壳的一“层”,网壳底部通过预埋钢板连接在裙楼顶部环梁上,网壳与混凝土核心筒在3、6、9、11层通过多点拉杆与钢筋混凝土塔楼连接。嘉峪关气象塔外形如图1所示。

图1 嘉峪关气象塔外形
2 网壳安装方案
为了提高作业效率,保证安装精度和作业安全,尽量减少高空作业,网壳安装施工采用的方法是:综合考虑吊车起重能力、组装场地大小、组装困难程度、吊装定位是否方便及现场施工干扰等诸多因素,将钢结构网壳拆分成适当大小的吊装组件。在地面焊接为一体后,再整体吊到高空中进行拼装焊接。整个网壳由下而上逐层安装,当下层吊装组件安装到位并焊接牢固后,再进行上一层组件的吊装。网壳主体拆分的吊装组件如图2所示。

图2 网壳主体拆分的吊装组件
3 吊装组件的安装定位
3.1 测量定位需要解决的问题
安装定位设计值是构成网壳的立杆、横杆和斜杆中心线在连接处交点的三维坐标。理论上讲,定位时应在吊装组件设计点安置测量标志,通过对标志的观测,指挥移动吊装组件到正确位置。具体操作步骤为:
(1)用塔吊将吊装组件吊到大致位置后,首先将组件竖杆下端与已安装好的下层组件竖杆上端对准。此时组件的上端已基本到位,只能在正确位置附近的小范围内移动。
(2)观测位于组件上端的测量标志,用葫芦链条移动组件上端,直至观测坐标等于设计坐标。当吊装组件各竖杆均处于正确位置时,安装定位测量工作即完成。
实际上,网壳定位设计点是无法直接观测到的。经过文献查阅,处理这种问题的一般思路是另行设置观测点,在定位物体上粘贴平面反射镜片或安装反射棱镜,通过获得观测点坐标来推算设计点坐标。
这种思路适用于定位点数量不多、定位物件空间方位单一的情况。嘉峪关气象塔网壳工程安装项目,存在下列问题:
(1)安装操作平台作业空间狭窄且支撑钢梁纵横交错,安装定位时常有障碍物遮挡观测视线,而在高空中重新安装、变更测量标志的位置或方向都比较困难。
(2)定位杆件众多,其空间方位角各不相同,加之观测站和观测点之间不通视时,还需变更地面观测站位置,使得设计点与观测点之间的空间几何关系复杂而难以确定。
(3)相对于一般项目,本工程定位点数量非常多。若观测点与设计点间的关系复杂,会因定位误差大、操作困难而无法保证作业效率。
3.2 解决方法
要解决上述问题,设置观测点的位置应符合以下要求:
(1)观测点与设计点之间的空间几何关系简单、精确。
(2)观测点与设计点间的空间几何关系与观测站位置无关,由设计点坐标计算观测点坐标简单、快捷。
(3)当观测点坐标等于计算值时,设计点即已到达正确位置,无需由观测点坐标再推算设计点坐标对比检验。
显然,若观测点与设计点连线与设计点所在竖杆的中轴线存在夹角,则设计点与观测点间的几何关系会变得非常复杂,因为在实际工作中此夹角难以精确地得出。经过反复研究、权衡,要满足上述3项要求,应将观测点设置在设计点所在竖杆中轴线的延伸线上,这样观测点与设计点之间几何关系非常简单,从而能够快速、简便地由设计点坐标推算出观测点的坐标,即以已知竖杆两端点空间坐标,和其延伸线上一点距一端点的距离为参数,快速计算出延伸线上的观测点坐标。
设吊装组件竖杆上端定位交点设计坐标为P1(x1,y1,z1),竖杆下一交点设计坐标为P2(x2,y2,z2),设计点到观测点的距离为d,两交点空间距离即杆长为s,观测点坐标为Pi(xi,yi,zi),可得:
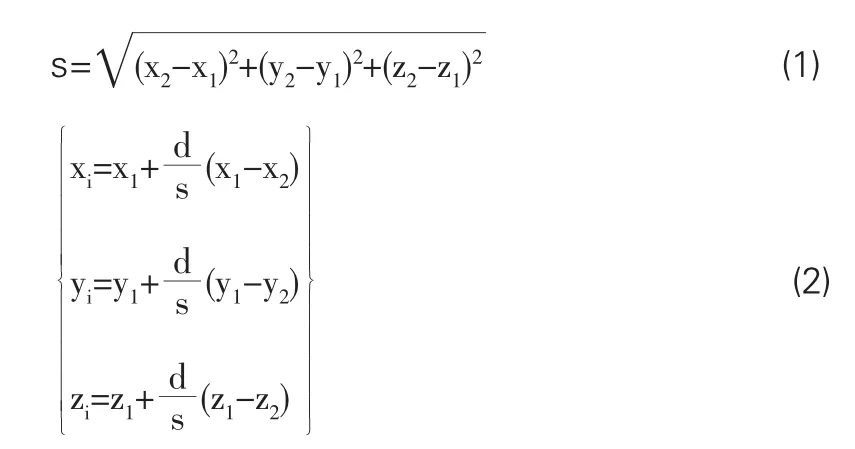
利用上述公式,根据实际情况确定参数d后,即可快速解算出观测点坐标Pi(xi,yi,zi)。
如前所述,网壳安装时首先将吊装组件竖杆下端,对准已安装到位的下一层吊装组件竖杆上端并固定,此时,吊装组件竖杆下端设计点已经到位。观测点计算坐标值是采用吊装组件竖杆设计方位角计算的,因此,当观测点坐标等于计算值时,所在竖杆轴线空间方位角必等于设计值,从而轴线上的设计点必等于设计值。由此可简单地根据观测点坐标等于计算值,来完成无法直接观测的设计点定位,使得定位工作简单快捷,很好地解决了安装定位的难题。
根据以上解决问题的思路,以及观测标志应满足的要求,结合工程实际情况,设计了如图3、图4所示的专用工具。
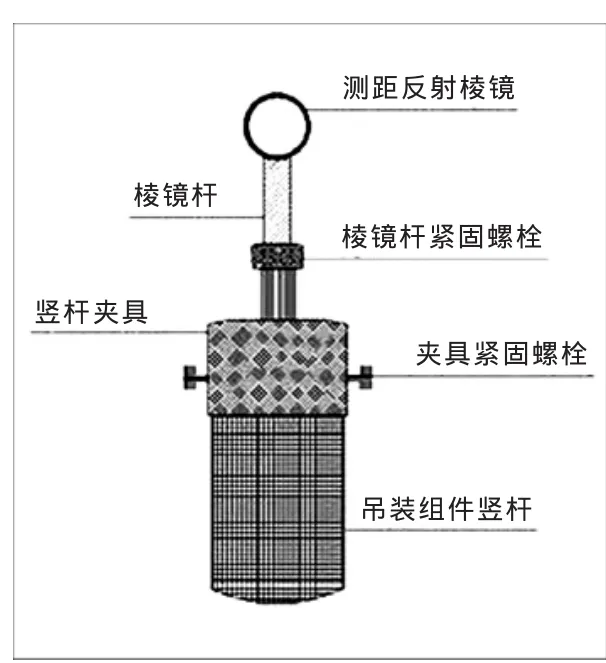
图3 扣件示意图

图4 扣件实物图
这是一种内径和竖杆外径相等的半开口圆筒状扣件,顶部正中设置可伸缩的棱镜杆,扣件制作时采用精确机械加工,以保证扣件与竖杆紧密接触。使用时,将其扣在吊装组件竖杆上端顶部并用紧固螺栓固定,这时棱镜杆轴线与定位设计点所在竖杆中轴线重合,从而棱镜中心位于定位设计点所在竖杆中轴线的延伸线上。考虑到实际观测时可能遇到障碍物影响通视,棱镜杆设计为能在5~50cm范围内拉伸的伸缩杆,定位时根据障碍物阻挡情况预先确定棱镜杆长度d,以避开脚手架等障碍物遮挡。
3.3 吊装与空间定位操作步骤
在施工现场根据实际情况确定棱镜杆长度d,并安装好反射棱镜后,就可以实施吊装组件定位工作了。由于观测定位操作时间较长,为保证定位精度,观测站均设置钢筋混凝土强制对中观测墩。塔式起重机将拼装好的吊装组件吊到相应位置后,首先对吊装组件竖杆下端进行限位,使其对接在相对应的下层吊装组件竖杆的顶部,这时竖杆上端即已基本到位(图5)。

图5 “海豚”头部整体吊装作业
然后观测人员连续观测安置在吊装组件上端竖杆上的反射棱镜,根据仪器所显示的信息,指挥定位人员用手拉滑轮将组件顶部移动到设计位置。定位过程中角度和距离的偏差,通过对吊装组件的前后、左右移动来调整。观测点实测坐标与设计值的三维坐标差值反映了定位准确度。由于组件立杆底部已经到达设计位置,如果组件竖杆上部到达设计位置,则测量定位工作完成,可将吊装组件下端焊牢,并将吊装组件上端固定在混凝土塔楼或安装平台上,定位安装工作即完成。
实际工作中,由于杆件加工、组装、焊接过程中不可避免地存在误差,使上下吊装组件竖杆对接不会完全正确。事实上,吊装组件在地面拼装时,即使没有任何定位误差,定位完成后焊接处理不当,仅焊缝收缩引起的变形都可能达到几厘米,而要在高空将重达数吨的吊装单元定位到毫米不差,其难度可想而知。所以,要使定位精度完全达到理论上的要求,实际上是难以实现的。实践中采用的作业办法是:
(1)吊装组件地面拼装时,连接吊装组件竖杆上下端口的斜杆暂不焊牢,使竖杆有一定移动自由度。
(2)吊装时,若上下两吊装单元竖杆端口对接不上,通过手动滑轮施力,利用钢管本身的韧性,强制移动吊装单元,使上下竖杆端口完成对接。
(3)在此基础上,再定位吊装单元竖杆上端到设计位置。
实践证明,按此作业方法,竖杆交点定位误差在4cm以内时,均能顺利实现对口连接,并且定位误差不会逐层积累,不影响网壳外观和往上各层的吊装定位。
4 小结
嘉峪关气象塔海豚状网壳结构复杂,安装定位难点很多,且无任何经验可供借鉴。这一技术的成功应用,创造性地解决了安装定位中的问题,使工程进展十分顺利,达到了预期的目标。
[1]CJJ8—99,城市测量规范[S].
[2]孔祥元,梅是义.控制测量学[M].武汉:武汉大学出版社,2002.
[3]李玉宝,曹智翔.大比例尺数值化测图技术[M].成都:西南交通大学出版社,2006.
[4]李青岳,陈永奇.工程测量学[M].北京:测绘出版社,1995.
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
建材与装饰(2020年14期)2020-06-11
塑料包装(2020年1期)2020-04-09
少儿美术(快乐历史地理)(2020年4期)2020-02-24
四川水泥(2019年5期)2019-07-12
学苑创造·A版(2019年4期)2019-05-10
新能源科技(2018年5期)2018-02-15
传感器世界(2016年7期)2016-03-25
振动工程学报(2015年1期)2015-03-01
物理实验(2015年8期)2015-02-28
