
LZD算法程序实现及其在DEM匹配中的应用研究*
2010-05-24 02:16许荣刚
山西建筑 2010年24期
许荣刚
数字高程模型作为地球表面地形的数字描述和模拟已成为空间数据基础设施和“数字地球”的重要组成部分,目前广泛用于自动绘制等高线、制作坡度、坡向图、立体透视图、制作正射影像图、立体匹配片、立体景观图、立体地形模型及地形图修测等领域[1]。
1 基于LZD算法的DEM匹配基本原理
LZD算法基本思想是:先以两个表面上的平面坐标相同的点为对应点(如果不存在对应点就内插一个临时点),然后利用对应点之间的z坐标差(在DEM表面上就是高差)的平方和最小为原则来建立目标方程,最后根据最小二乘原理来求解转换参数向量,这组参数能够拉近两个表面。反复迭代上述过程,就可以正确完成匹配。LZD算法结合规则格网DEM自身数据结构特点进行匹配,适合以规则格网DEM形式表述的地形表面和其他对象三维表面的匹配[2]。
2 基于LZD算法的DEM匹配方法程序实现
1)算法流程分析。
a.建立匹配模型间对应关系:对于待匹配模型中的每一格网点(x,y,z),如果在基准模型中能找到格网点(X,Y,Z)满足(X,Y)与(x,y)相等,则这两点相互对应;否则,根据(x,y),在基准模型中内插对应点(x,y,Z)。
b.建立观测方程:
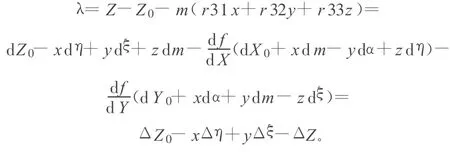
c.求解转换参数:利用最小二乘法原理,取初值为 ξ=η=α=0,m=1。由n(待匹配模型格网点数)个观测方程,建立最小二乘误差方程,求解七个未知参数,逐次迭代求解最优值。
d.用所求参数,对匹配模型进行转换:
2)算法模块实现。
a.DEM数据处理。由于所给的DEM数据是规则格网数据,只有高程序列、格网距离和起始坐标,首先需把一维高程序列转换成二维矩阵。高程矩阵元素下标与其X,Y的平面坐标相对应。
b.方程式的列出和求解。参数初始值选择为无平移(X0=Y0=Z0=0)、无旋转(ξ=η=α=0)和比例系数m=1。也即是说所有计算的转换信息,将被作为误差处理,对于精度较差的原始数据,在此没有对此方法的灵敏度进行详细的调查研究。
DEM中高程已知的这些点,能够列出其观测方程并采用最小二乘原理通过迭代进行计算,这些离散点的一阶导数也都能够通过立体模型来计算[4]。具体流程如图1所示。

3 LZD算法在DEM匹配中的应用研究
1)应用实例的设计。
针对LZD方法的DEM匹配问题,进行了模拟实验:
a.实验数据:采用的原始 DEM 大小为160×200,格网间距为xcell:4.522 6,ycell:4.402 5,其X轴,Y轴,Z值单位均为 m。
b.迭代限差:在匹配过程中,迭代终止条件由各参数相邻迭代值之差来判定,即七个转换参数的增量,七个转换参数的限差值由各个观测值的精度决定。在本篇论文中,各个参数的迭代限差如表1所示。在实际匹配应用中,各个参数的限差选取则依靠其对应的观测精度、经验值确定,在此不再做进一步讨论。

表1 参数限差表
2)实例设计:
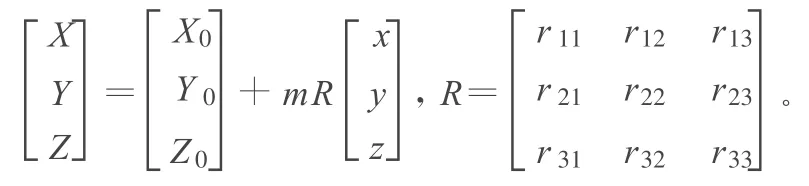
a.待匹配模型建立:为了验证LZD算法的实际匹配能力,首先对三维模型即标准模型进行了一定大小的平移、旋转和缩放,来产生具有不同旋转、平移和缩放系数的变换后模型即目标模型。在本次实验中选择的参数如表2所示。

表2 参数表


把上式两侧均左乘旋转矩阵R的逆矩阵R-1,根据刚性旋转矩阵R的性质RT=R-1,所以R-1×R=RT×R=I,P′=RT×(P-T)/m*。
这样,通过上式可以产生具有不同平移、旋转和缩放参数的目标模型P′,然后按照本文所述方法进行DEM匹配,可以直接求出平移参数、旋转参数和缩放系数,并可直接验证匹配是否正确。
b.模型插值:利用 MATLAB函数 griddata,基于待匹配DEM,对基准DEM进行内插,使标准模型的所有点在待匹配模型中都有点与之相对应。之后便可利用最小二乘法进行模型间的匹配参数求解[3]。
3)应用效果分析。
LZD方法进行DEM匹配的模型差值和计算效率分析:
迭代次数:20次。
匹配后两个模型间的位置差:0.000 1,-0.028 0,0.000 6,1.000,-0.000,0.000,-0.000。
由上可知,迭代方法能够收敛,模型能够成功匹配。由于LZD算法建立对应关系的准则比较简单,虽然迭代速度较慢,但因其算法简单,计算量小,所以LZD算法是一种高效便捷的方法。
4)误差分析。
我们在设计匹配实验时,系数矩阵中包含的误差是由于以下两方面原因:首先,在大于两格网距离的长度时,一阶导数(斜率)取的是离散的近似值;其次,一阶导数计算时,高程中通常含有误差,观测值也会受影响。在DEM插值中,在每次进行迭代时,不是在地表做插值而是在一个数学表面做插值。事实上,从估计量模型得到的这一额外偏差是很重要的。
在最小二乘法的应用中,已假设观测值之间相互独立,尽管我们没有在最小二乘估计中引入先验协方差阵,忽视在此实验中的协方差,可能是正确统计模型中出现的最大偏差[4]。
4 结语
由本次试验可得如下结论:1)LZD算法能够成功进行模型匹配,并具有较大的拉入范围和较好的精度、速度。2)LZD算法不要求三维模型是规则格网的DEM,但规则格网不论在地面DEM中,还是在立体模型的数据简化求导中和在DEM内插方面都是一个优势。3)基于最小二乘原理的LZD算法,对于两个待匹配表面,无需任何先验信息,待匹配模型无需任何特征提取。4)本文没有对该方法的表面差异探测能力进行探讨,对于较差的初始参数,其收敛性问题有待进一步研究。
[1]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997.
[2]冯义从,岑敏仪.三维自由表面匹配及其应用[J].测绘工程,2005,14(3):36-40.
[3]郝文化.MATLAB图形图像处理应用教程[M].北京:中国水利水电出版社,2004.
[4]柴登峰,舒 宁,张剑清.动态DEM 匹配方法研究[J].国土资源遥感,2002,51(1):38-42.
[5]余祖锋,许才军.MATLAB在测量中的应用[J].东北测绘,2002(4):43-46.
猜你喜欢
数理化解题研究(2022年5期)2022-03-12
初中生学习指导·中考版(2022年1期)2022-02-09
中国科学数据(中英文网络版)(2020年4期)2021-01-20
初中生学习指导·中考版(2020年2期)2020-09-10
空间科学学报(2020年6期)2020-07-21
装备维修技术(2020年21期)2020-04-22
中小企业管理与科技·下旬刊(2019年8期)2019-11-09
中学生数理化·七年级数学人教版(2016年8期)2016-12-07
建筑工程技术与设计(2015年17期)2015-10-21
测绘科学与工程(2014年4期)2014-02-27
