“神舟号”载人飞船开伞控制方案设计
2010-06-11 01:53李惠康
航天返回与遥感 2010年3期
荣 伟 李惠康
(北京空间机电研究所,北京100076)
1 引言
降落伞的开伞作为航天器回收着陆系统工作中的第一步,是关系到回收着陆系统工作成败的一个关键环节。如何选择一个合适的开伞时机、采用何种开伞控制方法、怎样控制好开伞时机等问题都是航天器回收着陆系统开伞控制技术中的关键环节。如果开伞点太高,则有可能导致开伞动压太大,降落伞开伞后被冲破;若开伞点太低,则有可能发生回收着陆系统的工作程序还没完全完成,返回舱或着陆器就已着陆的情况。因此,降落伞的开伞控制技术是航天器回收着陆系统中的一项关键技术。
航天器回收着陆系统中的开伞控制方法因其任务特点和需求的不同而各异。由于载人飞船存在着多种返回和救生方式,因此必须确保其开伞控制方案能适应各种返回和救生状态。本文根据“神舟号”载人飞船的特点,制定了开伞控制方案,介绍了该方案的设计思路以及仿真试验和飞行试验的验证情况。
2 载人飞船开伞控制方案
航天器回收或着陆系统中常用的开伞控制方法主要有[1-2]:纯时间控制法、过载-时间控制法、静压高度控制法、雷达高度控制法和自适应过载控制法。其中,纯时间控制法是指在轨道舱与回收舱分离后按预先确定的时间控制开伞;过载-时间控制法是利用过载开关和时间控制器进行控制的方法;静压高度控制法是利用大气静压和高度的对应关系控制开伞;雷达高度控制法是指通过着陆雷达提供的高度和速度信息控制开伞;自适应过载控制法是一种以动压为控制目标的开伞控制方法[3]。
由于载人飞船需要考虑到航天员返回过程中的安全性和舒适性,为了改善返回舱的进入状态,减小返回过程中的最大过载值和热流密度峰值,减小返回舱的落点散布等,返回舱的再入一般采用弹道-升力式的返回方式。这样,当采用弹道-升力返回时,返回轨道有一定的机动性,返回舱到达某一高度的时间相对于返回再入点存在很大的偏差。同时,在某些应急情况下,为了保证航天员的紧急、安全返回,又需要采取弹道式方式返回,这和正常的弹道-升力式返回轨道又存在着很大的差异。因此在飞船上采用纯时间控制法和过载-时间控制法来控制开伞都是不合适的。
考虑到飞船返回时可能出现不同状态,为了确保飞船按预定高度开伞,可以利用大气静压和高度的对应关系,采用“气压高度”法来控制开伞高度,也就是通过高度控制装置感受返回舱取压孔表面的气压(包括动压和静压)来控制开伞高度。由于目前对于地球大气环境具有较好的认识,特别是对于地球大气压力随高度的变化情况或规律早已制订了相应的标准。因此,利用大气静压和高度的对应关系,并结合风洞试验获取返回舱返回过程中取压孔处动压的影响规律来控制开伞,可以比较精确地控制开伞高度,也可以适应飞船的各种返回方式。
由于返回舱取压孔一般设置在返回舱的侧壁上,返回舱在返回过程中,处于高速运动的状态,取压孔表面的压力并不单纯是返回舱所处当地的大气静压,而是一个包含动压影响的总压,即:

式中 P0为高度控制装置敏感到取压孔表面的总压;P∞为大气静压,其值受着陆场地理位置及季节的影响;Q为动压,取决于返回轨道参数;Cp为压力修正系数,其值受取压孔位置、返回舱姿态以及飞行马赫数的影响。
因此,静压高度控制的工作原理是,先给高度控制装置装订工作压力,其值等于所需高度对应的大气静压力(P∞)与返回舱下降至该高度时取压孔表面的动压修正值(Q◦Cp)之和。这样在实际使用中,当返回舱下降至高度控制装置发出接通信号(即达到工作压力),此时返回舱所处的高度即接近所需的高度。由此可见静压高度控制适用于动压基本不变或变化缓慢的环境中,因此,应在返回舱达到稳定下降状态后使用静压高度控制,且取压孔的压力修正系数受返回舱运动的影响应尽可能小,才能减小静压高度控制的使用误差,所以静压高度开伞控制需通过精心选择取压孔的位置、多状态风洞测压试验获取压力修正系数、合理选取名义开伞高度、精心设计高度控制装置等步骤才能实现。
3 开伞控制的实现
根据静压高度控制的工作原理,制定其开伞控制的设计流程,如图1所示。
3.1 取压孔位置的确定
根据静压高度控制的工作原理,由于压力修正系数受取压孔的位置、返回舱姿态以及飞行马赫数的影响,因此,为了尽量减小返回舱返回过程中弹道参数对压力修正系数影响的变化,取压孔位置一般选择在返回舱的背风面。取压孔的具体位置可以通过计算流体力学(Computational Fluid Dynamics,CFD)数值仿真和风洞试验来确定。
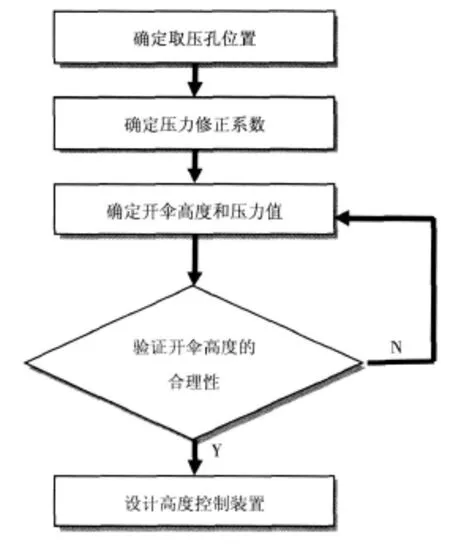
图1 静压高度开伞控制设计流程
3.2 压力修正系数的确定
如上文所述,由于返回舱在返回过程中处于高速运动状态,受动压的影响,取压孔表面的压力并不是返回舱所处当地的大气静压,而是一个总压,是静压与动压综合作用的结果。因此,在考虑高度控制装置所感受的压力时,必须修正返回舱动压的影响。压力修正系数即是对动压的修正,可见压力修正系数的确定是确保飞船按预定高度开伞的一个关键环节。
取压孔位置确定后,压力修正系数的确定主要是考虑返回舱姿态以及飞行马赫数的影响,即寻找 Cp与飞行马赫数(Ma)、攻角(α)、侧滑角(β)的函数关系(取压孔位置已定)。即

为了获得压力修正系数Cp,可以通过CFD计算和缩比模型的风洞试验相结合进行研究。由于风洞试验只能测得若干特征点状态下的Cp值,要想获得连续的函数关系,仅靠风洞试验是不够的,或者说如果单纯依赖于风洞试验必然要进行大量车次的试验,费用过高。因此可借助于计算机数值计算的方法来模拟取压孔的压力特性,获取压力修正系数Cp。同时CFD数值计算的准确性和可信度必须通过风洞试验的数据来进行对比验证。
3.3 开伞高度和压力值的确定
开伞高度和高度控制装置的接通压力值是飞船开伞控制中的两个关键参数。
开伞高度的确定也是开伞时机的选择,主要是根据飞船返回轨道和开伞后回收着陆段的弹道来确定的。选择合适的开伞时机实际上是设计合适的开伞高度、开伞速度、开伞马赫数、开伞动压等参数,以确保降落伞工作的可靠性和着陆系统工作的完成。在实际工程设计过程中,开伞高度的设计需要考虑到各种可能的返回轨道,包括标准返回轨道和各种偏差轨道,同时还要考虑到可供选择的控制方法和器件,确保在所有的设计偏差轨道范围内,开伞后的各个程序动作均能及时、可靠地完成,并在控制器件误差允许的情况下,降落伞系统都能正常工作,不允许因开伞时温度、动压的变化造成开伞高度超出设计要求。对于“联盟号”和我国的“神舟号”飞船来说,一般开伞高度设计在10km左右[4-5]。
高度控制装置的接通压力值即为高度控制装置敏感到取压孔外的气压P0,也是高度控制装置的预调设计指标,主要由事先设计的开伞高度所确定。其主要设计思想为:
1)根据着陆场的气象数据确定大气静压P∞(标称值)与高度之间的关系;2)根据飞船的返回轨道确定返回舱到达不同高度时的动压Q;
3)根据公式(1)(其中Cp由风洞试验结果结出)确定P0与高度之间的对应关系(标称值);
4)根据回收着陆段的弹道计算情况确定一个开伞高度(H1);
5)从上述所得到的P0与高度之间的对应关系确定开伞时(对应高度H1)取压孔处的压力P1,即为初步确定的高度控制装置设计的压力指标值,如图2;
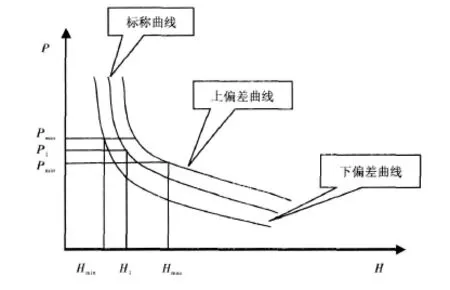
图2 取压孔压力与开伞高度间的关系示意图
6)由于大气压力受各种因素的影响,使得飞船的实际开伞高度也存在着一定的变化,因此为了确保回收着陆系统工作可靠,还需知道因大气静压变化所引起的开伞高度变化范围,即P0与高度之间的对应关系的上、下偏差曲线;
7)最后根据高度控制装置本身的偏差以及P0与高度之间的对应关系的上、下偏差曲线确定开伞高度范围,并检查在这些高度范围内开伞是否均能满足开伞要求,否则再对开伞高度进行修正。
3.4 高度控制装置设计原则
由于开伞是回收着陆关键的第一步,高度控制装置的可靠性至关重要。因此在其设计上一般要采取以下原则:
1)采用多组高度控制开关来进行备份;
2)对每个高度控制点采用“三取二”冗余措施,以保证其工作可靠;
3)增设滤波电路,以消除在振动、冲击环境中误发信号,提高开伞信号的可靠性。
4 设计结果验证
飞船开伞高度设计的合理性和实际控制情况主要是通过仿真试验和飞行试验进行验证的。
由于飞船存在着多种返回或救生方式,除了正常的弹道-升力式返回外,还有弹道式返回和发射段故障情况下的应急救生状态,以及正常返回过程中回收着陆系统自身故障情况的工作状态。因此,为了验证设计的开伞高度是否满足各种返回和救生方式下的状态要求,仅靠空投或飞行试验是无法完全验证到的,需要通过仿真试验来验证各种工况。为此,研制了一套半实物仿真系统,对实际开伞高度的范围、开伞高度设计的合理性、高度控制装置压力值设置的合理性、以及开伞后回收着陆系统工作性能等进行仿真试验。
利用半实物仿真系统平台对飞船正常弹道-升力式返回、弹道式返回、应急救生、以及一些偏差状态下的工况和条件,进行了大量仿真试验,开伞高度范围均在9~13km左右。结果表明在各种工况和条件下,开伞高度均在设计范围内,高度控制装置压力值设置合理,开伞后回收着陆系统工作性能均满足设计要求,开伞控制方案设计合理。
根据“神舟号”飞船3次载人飞行试验结果,实际开伞高度均在设计的10km高度左右,图3为某次飞行试验中开伞前后动压随高度的变化情况,并且根据高度控制装置实际信号接通高度及相应的返回弹道参数,推算得到高度控制装置的接通压力及相应的静压高度值均与高度控制装置的设计值和单检测试时所测得的高度值相吻合。
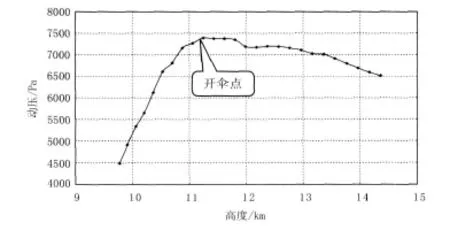
图3 某次飞行试验中开伞前后动压随高度的变化
5 结束语
经过大量的仿真试验以及多次飞行试验的结果表明:“神舟号”飞船在各种工况和条件下,开伞高度均在设计范围内,高度控制装置压力值设置合理,开伞后回收着陆系统工作性能均满足设计要求,开伞控制方案设计合理。
[1]林华宝,陆章福.弹道及弹道引力式进入器回收和着陆系统[M]//王希季.航天器进入与返回技术(下).北京:中国宇航出版社,1991:168-171.
[2]荣伟.火星探测器减速着陆技术研究[D].中国空间技术研究院工学博士学位论文,2008.
[3]荣伟,陈旭,陈国良,等.火星探测着陆系统开伞控制方法研究[J].航天返回与遥感,2007,28(4):6-11.
[4]林斌.联盟号载人飞船降落伞系统介绍和分析[C].全国第五届安全救生学术交流会.襄樊,2001.
[5]林斌.神舟号载人飞船降落伞系统[C].中国空间科学学会空间探测专业委员会第十八次学术会议.宜昌,2005.
猜你喜欢
基层中医药(2022年5期)2022-10-24
军事文摘(2022年12期)2022-07-13
中国惯性技术学报(2019年3期)2019-10-15
表面工程与再制造(2019年3期)2019-09-18
中西医结合心血管病电子杂志(2019年14期)2019-07-05
电子制作(2018年2期)2018-04-18
会计之友(2018年4期)2018-02-02
太空探索(2016年5期)2016-07-12
太空探索(2016年7期)2016-07-10
爆炸与冲击(2016年2期)2016-04-20