基于光栅扫描的雷达P显余辉的一种实现方法
2010-06-28 03:04谢永亮席泽敏毛德广
舰船电子对抗 2010年2期
谢永亮,席泽敏,毛德广,戴 路
(海军工程大学,武汉 430033)
0 引 言
传统雷达P显的目标回波信号是借助显示器内部荧光材料的余辉效应,通过电子束扫描线圆周扫过屏幕留下的逐渐消隐的余辉来判断目标。
但光栅显示器无法自动产生随机扫描中荧光粉的余辉效应,因此必须人为地模拟扫描线的余辉效应。
在建立雷达虚拟操作系统或维修训练系统时,显示器的仿真效果直接影响模拟器的训练效果。
目前基于光栅扫描的余辉仿真的方法主要有画线法、固定扇扫法、逐点消隐法。前两者图像会出现辐射状花纹及扫描速率不稳定的现象,后者应用较多,效果也明显强于前者。
本文在逐点消隐法的基础上提出了亮度比较法,在光栅显示器上得到了余辉效果逼真、画面流畅的仿真图形。
1 P型显示器特性及余辉仿真的方法
P型显示器,有时也称为平面型显示器或环视显示器,是雷达装备常用的显示器之一。它显示目标的斜距离和方位2个坐标,是极坐标形式的二度空间显示器。它用平面上的亮点位置来表示目标坐标,属于亮度调制显示器。P显荧光屏中心代表雷达站位置,距离扫描线随着天线的方位扫描在画面上同步转动。目标呈现为一段亮弧,其斜距离表示为亮弧与扫描起点的径向间隔,方位取决于亮弧中心在屏上的方向。
P型显示器进行工作时,主要分为3个过程:上电过程、扫描过程和断电过程。在这3个过程中都存在有亮度的变化:上电过程有扫描线渐亮的过程,扫描过程有移动的余辉现象,断电过程有扫描线渐暗的余辉过程。对余辉等级的逼真模拟是雷达模拟器研制过程中需要解决的首要问题。
在仿真系统中,显示器件及其扫描方式的选择决定了仿真的方法。按照所使用的显示器的不同,雷达显示系统的仿真方法可分为两大类:一类是硬模拟,以实际雷达所使用的示波管为终端来实现显示仿真;另一类是软模拟,以光栅显示器为终端来实现显示仿真。
硬件实现法一般采用单片机或工控机作为仿真运算单元(如图1),由于管头的使用,硬模拟实现随机扫描显示。该类仿真器具有原理简单、余辉效果逼真、辉亮调节容易等特点;主要缺点是仿真器的结构较复杂,硬件成本较高,维护要求也高,通用性和可移植性差。
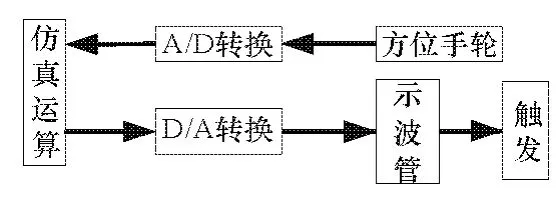
图1 半实物仿真结构
软模拟通常采用如图2所示的仿真结构,这类仿真器的特点是开发方便、构成简单,同时由于采用全数字处理,因而不需要产生高精度的仿真信号,也不需要特定的硬件,具有良好的可靠性、适应性、通用性和可移植性。
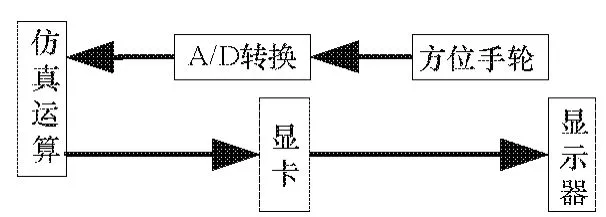
图2 计算机仿真结构
软模拟通常采用光栅显示器,用计算机编程实现。光栅扫描显示器具有高亮度、高稳定度、大容量显示的图文处理能力、丰富的色彩及多灰度等级的优点。但光栅扫描无法自动产生随机扫描中荧光粉的余辉效应,因此必须人为地模拟扫描线的余辉效应。一般采用如下3种方法实现:
(1)画线法。该法较易实现,原理是在屏幕上以画直线的方式画出每一角度的扫描线。每次画一个扇面灰度递减的直线簇。但当程序运行时,扫描线轨迹不断地在屏幕上转动,该方法不能无缝地覆盖整个扇扫区域,从而产生一个辐射状的固定花纹。
(2)固定扇扫法。这是在画线法基础上改进的一种仿真方法,控制扇形区域的圆心角,依次使不同扇形区域亮度减少。它虽然消除了辐射状花纹,但在没有目标到有目标信号时,由于数据量的增加会造成扫描线的转速不同。
(3)逐点消隐法。其主要原理是:在一定的时间内,随机将视频存储器中的内容降低1个灰度等级,每个点都必须被修改,这样整个屏幕画面亮度逐渐衰减。其产生的余辉效果比较逼真,扫描线转速也较稳定。近距离区域多个角度的距离单元会对应相同的像素点,中心部位被消隐的次数明显要比其他部位多,导致效果有些失真。
2 基于光栅扫描的余辉等级亮度比较法实现方法
余辉处理是雷达显示器一种重要的显示方式,通过余辉雷达操作员可以得到额外的信息,作为目标判性的重要依据。雷达PPI显示器的电扫描线是圆周扇扫,而微机显示器显示机制是电子束自左向右、自上向下进行光栅扫描,因此必须进行坐标变换。现代雷达天线转速通常为每分钟几转至几十转,一般导航雷达天线转速约为10转/分,那么扫描线转动一周的时间为6 s,这也就意味着要实现扫描线的平滑显示,则必须在6 s内完成扫描线覆盖整个圆周的显示。
为得到稳定的不闪烁画质,每秒显示画面需要大于25帧,即图像刷新频率必须达到1帧/40 ms,对于一个800×800像素的PPI显示器,要求达到的处理速度是640 k Pixel/40ms,即16 M Pixel/s。对于现在主流配置的电脑来说,双核主频2.8 GHz、内存2 GHz,9 800 GT 1 G独显,处理16 M Pixel/s的速度还是轻而易举的。
逐点消隐首先要得到整个P显上的像素点,为产生不同方位的扫描线,将方位角量化,量化标准是能覆盖圆域中所有点,由于扫描区域的分辨率为800×800,所以半径为400像素。把圆周映射成极坐标,在角度上划分成[2π×400]等分,实际上可取3 600等分,在距离上划分成400等分,基本可无缝覆盖整个圆周,这样初始生成了3 600×400个像素的圆域。这样扫描线的角度步进值为360/3 600=0.1°。设雷达扫描速度为10圈/min,屏幕刷新频率为60 Hz,则每一帧时间内扫描线将经过360×10/60/60=1°,相当于扫描线步进10格。考虑到近距离区域,多个角度的距离单元会对应相同的像素点,首先为每个像素点定义一个属性的结构体:
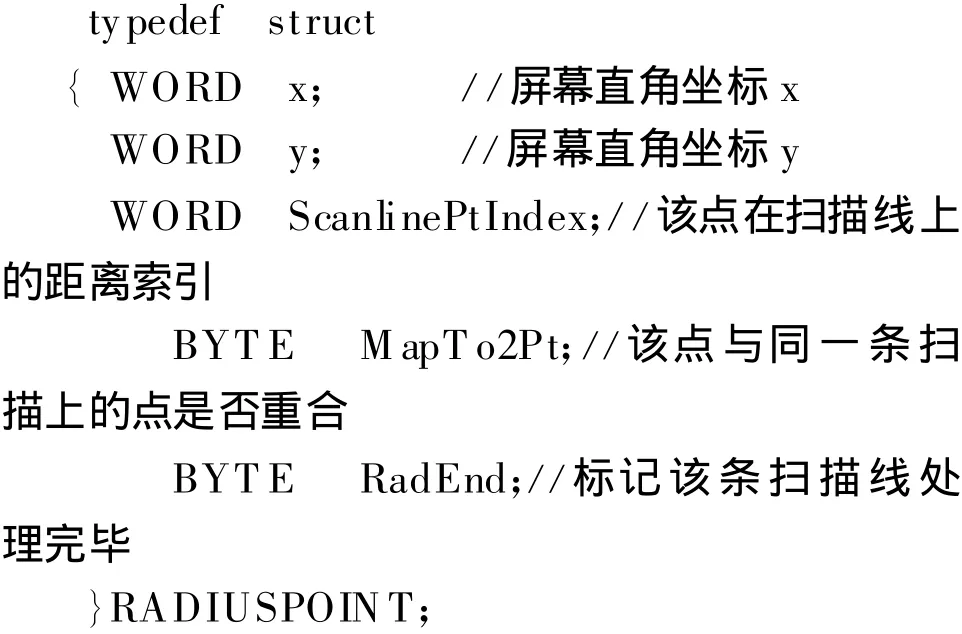
为圆域内的点分配内存空间:

将圆域内的点由P显极坐标转换成光栅显示器所采用的直角坐标,如图3所示。
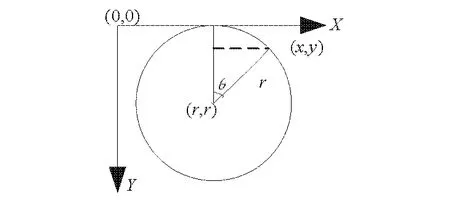
图3 极坐标转换成直角坐标示意图
对同一条扫描线上相邻的两点,如直角坐标相同,就把MapTo2Pt设为1,标记为相同的点;如相邻两点的直角坐标不相同,则把距离索引值赋给ScanlinePtIndex,每条线最后一个点设置 RadEnd为1来标记每条线已处理完毕。对于相邻两条线上的点,若当前线上点与前一条线上相邻4个点的直角坐标相等,设置为m_pPixelOverlap[i]=1,否则设为0。
每帧扫描线步进10格,将当前扫描线设为初始亮度,其后每条扫描线的亮度按与当前扫描线角度差 m_anglediff取 m_wAttenuation[m_anglediff]的亮度,其中亮度小于或接近零的设为零。由于近距离区域多个角度的距离单元会对应相同的像素点,中心部位被消隐的次数明显要比其他部位多,导致效果失真。需对这些坐标相同的点进行处理,对属性MapTo2Pt为1的点,比较坐标相同的点处于不同距离时的亮度,取其大者显示。对于属性 m_pPixelOverlap为1的点,比较处于各个角度时的亮度,取其大者显示。这样对于同一个点,只显示一次且取其亮者显示,较好避免了中心部位被消隐次数过多的情况。对于实现余辉等级的情况,只需设置m_wAttenuation的大小就可调节余辉等级。如有雷达回波进来,只需比较其与扫描线上点的亮度就可以,取其亮度大者显示,较好实现了图像的融合,易于实现后期程序的扩展。
3 仿真实现与结果分析
通过使用Visual C++编程仿真,得到如下仿真结果。图4~图6为不同余辉等级下的P显仿真图形,图7为画线法得到的仿真结果。

图7 画线法得出的仿真结果
通过两种实现方法的结果比较,画线法生成的仿真图形由于扫描线不能完全覆盖整个圆域内的点,出现了严重失真。本文提出的亮度比较法有效解决了由于近距离区域内多个角度的距离单元对应相同的像素点,使得中心部位被消隐的次数明显要比其他部位多,导致效果图像失真的问题。该方法得到的余辉效果逼真,画面流畅,扫描速度达到了预定的10转/s的要求,且程序便于扩展,易与雷达回波信号叠加,得到完整雷达显示画面。
4 结束语
在雷达模拟器中,余辉实现的逼真程度很大程度上决定了模拟器的效果。本文实现的多级余辉效果克服了图像出现辐射状花纹的现象及扫描速率不稳定的现象,得到了画面流畅、效果逼真的仿真图形。而实现仿真效果逼真的余辉一般会给处理器带来很大的运算量,且必须充分考虑扫描线与回波的叠加方式。本文采用的亮度比较法对冗余点进行了处理,并且易与雷达回波信号叠加,便于程序的扩展,可应用于模拟器的设计及雷达技术的研发。
[1]杨万海.雷达系统建模与仿真[M].西安:西安电子科技大学出版社,2007.
[2]米切尔 R L.雷达系统模拟[M].北京:科学出版社,1986.
[3]朱兵.基于余辉地址表的雷达显示余辉模拟方法[J].舰船电子对抗,2007,30(3):37-39.
[4]樊世友,杨作宾.基于余辉模型的P型雷达显示器计算机仿真[J].计算机仿真,2003,20(4):6-8.
[5]刘翠海,温东.光栅扫描显示器上实现PPI雷达长余辉仿真[J].计算机仿真,2002,19(2):25-27.
[6]张泽润.船舶导航雷达[M].北京:人民交通出版社,1990.
猜你喜欢
南昌工程学院学报(2022年4期)2022-12-18
陕西教育·高教版(2022年3期)2022-03-14
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
现代电子技术(2021年1期)2021-01-17
趣味(数学)(2020年12期)2020-06-09
浙江工业大学学报(2019年6期)2019-11-01
微型电脑应用(2019年1期)2019-01-23
科技创新与品牌(2018年9期)2018-10-24
电脑知识与技术(2018年35期)2018-02-27
小学生导刊(低年级)(2016年2期)2016-02-24