
单目仿生眼控制系统
2010-07-09 11:29谢少荣郑丽丽
制造业自动化 2010年1期
山 峰,谢少荣,郑丽丽,罗 均
(上海大学 机电工程与自动化学院,上海 200072)
0 引言
仿生眼系统是近年来国内外研究的热点[1],它可以根据摄像头采集回来的图像信息以及各传感器的信号,不断调整运动跟踪平台的转动,使摄像头视轴跟踪目标物体运动。通过一定的仿生模型,可以使仿生眼系统模仿人眼的前庭动眼反射、视动反射、平滑追踪以及急动等功能。
鉴于仿生眼系统体积小、重量轻,可以搭载在各种移动机器人、水下机器人以及飞行器上,用于交通、军事、反恐防暴、勘察、救灾等多种危险或者不适合人近距离观察的环境。
本文设计了一个仿生眼的运动控制系统,实现了与课题组其他成员所设计的眼球机构控制单元和图像处理系统的接口对接。通过实验调试,验证了系统可以满足仿生眼运动控制的实时性要求。
1 仿生眼系统与人眼的对应关系
人们通过支配6条眼外肌使之产生协调运动,使目标物体在视网膜的中央凹上成像。该类运动可视为视觉-眼动系统在一定刺激下的输出,表现为不断地视轴运动。

图1 单眼眼动简化模型
根据人眼的运动模型[2]提取出单眼运动的简化模型如图1所示。
2 硬件设计
整套仿生眼系统由控制系统、图像处理系统、眼球机构、三轴陀螺仪、无线通信模块组成。
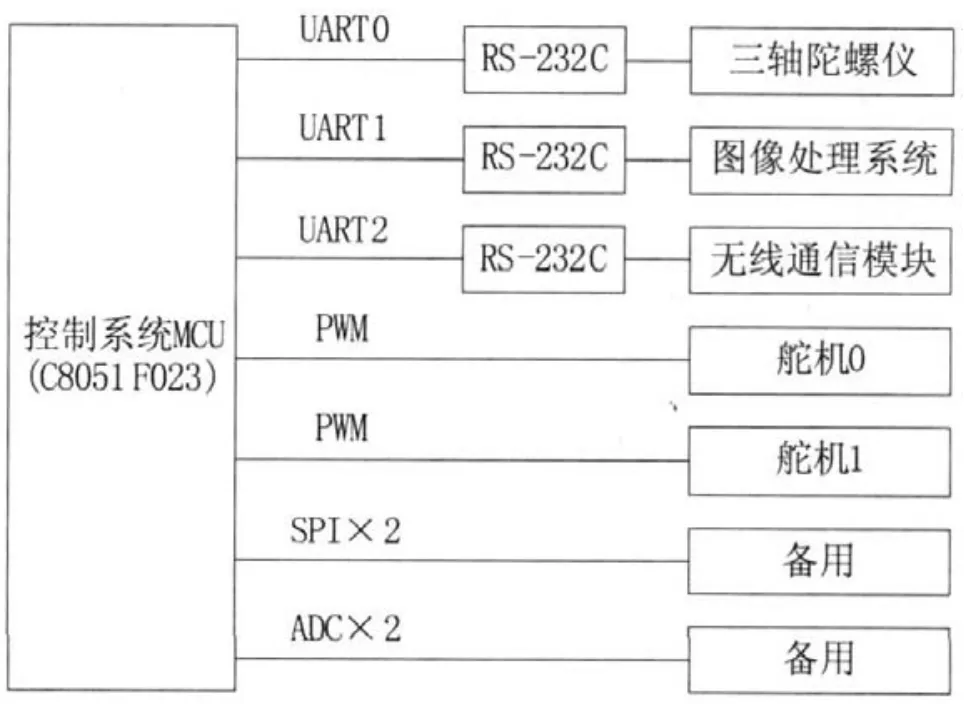
图2 硬件系统图
2.1 眼球机构
微型摄像头置于眼球内,该机构具有两个自由度的转动[3]。
利用两台舵机控制眼球的转动。这里选用韩国HiTEC公司型号为HSG-5084MG的舵机作为眼球机构的驱动器。该舵机采用4.8V电源供电,最高可输出1.5kg.cm的扭矩,空载转速达到0.07s/60°,体积为29×13×30mm,满足了对运动机构的微型化和高速响应的要求。
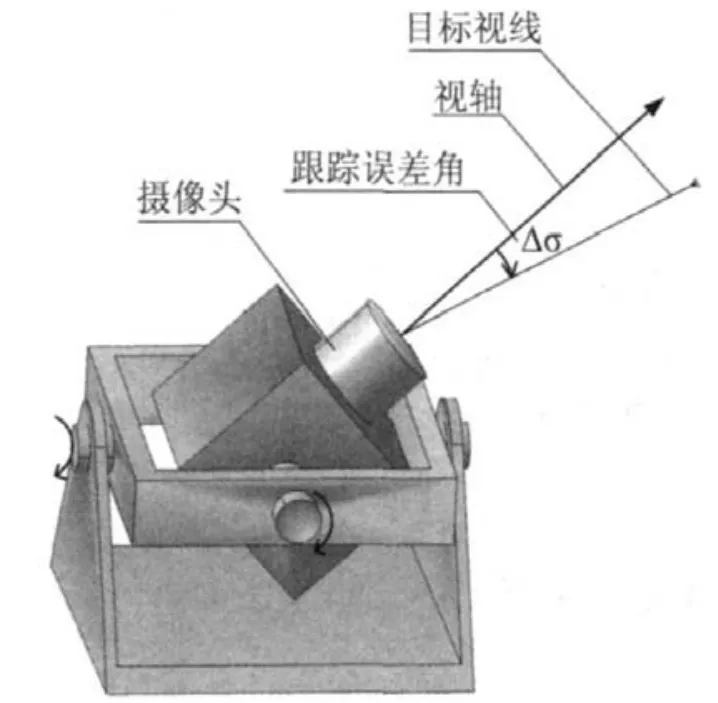
图3 眼球机构原理图
2.2 MCU
采用Silicon Laboratories公司的C8051F023单片机作为运动控制系统的核心处理器。C8051F023是完全集成的混合信号系统级MCU芯片[4],其内核采用流水线结构,70%的指令的执行时间只需要1个或2个系统时钟周期,加上C8051F023最高可达25MHz的系统时钟频率,与标准的8051结构相比处理速度大大提高。同时C8051F023内置64K字节的程序存储器和4352字节的数据存储器,在大多数的应用中无需再另外扩展存储器。
在控制系统中,利用UART,通过MAX3232进行电平转换,与外部的三轴陀螺仪、图像处理系统以及无线通信模块进行通信连接。由于C8051F023内部只带有2个UART,因此,还需要扩展一个UART。这里采用软件UART,下文会有详细论述。
采用周期为20ms的PWM对舵机进行控制。本文中所使用的HSG-5084MG舵机,PWM控制信号的高电平时长为1.1ms~1.9ms,对应于舵机的转动角度-35°~+35°。当高电平时长为1.5ms时,舵机的转角位于中心位置。
除此之外,还预留了2个SPI接口和2个ADC输入通道,用于系统将来的扩展。如可利用SPI与所搭载的机体的控制器进行通信;也可利用ADC来观测供电电池的电压信号,可在电压不足的情况下进行报警。
2.3 UART的扩展
本控制系统中,由于C8051F023本身只带有2个UART接口,但系统的应用中却需要3个UART,因此还需要另行扩展一个UART。
扩展UART的方法不外乎两种:使用扩展芯片或者软件模拟。采用扩展芯片方式增加UART最大的缺点就是需要增加成本,这在成本敏感的项目里面是不可取的。通过充分挖掘MCU片上硬件资源,使用软件模拟方式生成UART,不但能够降低成本,还能简化电路。考虑到C8051F023本身自带的PCA(可编程计数器阵列)就能为软件UART提供一个很好的解决方案[5],因为PCA计数器在产生中断的情况下不会停止计数,即不会因为中断而产生延时的积累,利用这一点能够产生精确波特率,这是传统的使用定时器产生软件UART的波特率所不能比拟的。
在这里利用两个PCA模块分别产生软件UART的接收和发送波特率,并利用PCA的下降沿捕获功能判断数据接收的起始位。所有的接收和发送过程是在PCA中断服务程序内完成的。
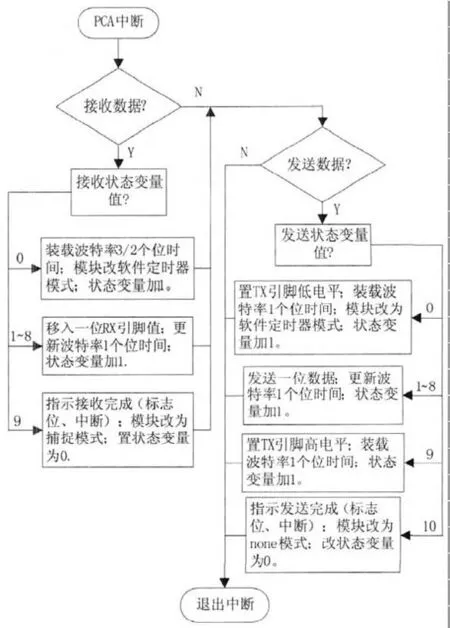
图4 软件UART程序流程图
2.4 图像处理系统
图像处理是仿生眼系统的核心[6]。通过图像处理,可以获取运动的目标物体与图像中心的偏角,并把偏角数据通过RS-232C传给运动控制系统。运动控制系统根据所收到的数据信息,再控制眼球机构的转动,使目标物体始终处于图像中央。
2.5 三轴陀螺仪
当仿生眼系统搭载在非固定机体上时,由于机体自身受到发动机振动、空气阻力等外界因素的影响使得的机体自身姿态发生改变,这势必严重影响对移动目标视频跟踪的稳定性。所以需要能够实时的采集到机体姿态的变化,并根据采集到的变化量给予反向控制,从而减少机体姿态对跟踪仿生眼系统的影响,避免了跟踪摄像头视轴经常偏移移动目标。
本系统中考虑到控制跟踪的连续性和稳定性,采用了具有高速度、高精度、多功能的传感器3DMGX1[7]。3DM-GX1可以综合三个角速率陀螺仪,三个正交的加速度计和三个正交的磁力计的测量数据,从而在静止或动态的条件下提供稳定的方向信息。当三个轴都在360°的范围内进行旋转时,该产品可以输出为矩阵、四元数或欧拉角度方程格式的方向信息;它的数字式连续输出还可以为所有传感器提供温度补偿信号;其拥有一个嵌入式处理器,自带了可调滤除算法,以提供稳定的输出信号;内置RS-232C接口。
2.6 无线通信模块
由于仿生眼系统是搭载在移动机器人、水下机器人或飞行器上的,它与上位机势必只能通过无线通信取得联系。
无线通信模块连接机载的跟踪控制系统和地面控制站,在向地面发送实时的跟踪数据的同时,实现地面操作人员对跟踪控制系统的远程操作和人工干预。根据其工作任务和环境特点,要求无线通信模块串口传输、通信距离远、功耗低、稳定可靠。为此,选用了可工作在900Mhz或2.4Ghz不需认证的ISM波段的XStream-PKG-R[8]无线数传电台,它具有如下主要功能:
支持RS-232/485(多端口总线)协议;
与主机接口波特率 :1200bps~57.6Kbps,空中传输速率9600bps或19.2Kbps,户外传输距离可达11km。
3 软件设计
控制系统主要实现的功能如下:
1)与上位机进行无线通信,获取命令数据;
2)与图像处理系统进行通信,获得摄像头视角偏移数据;
3)获取仿生眼所搭载的机体的姿态变化率;
4)实现对眼球机构的运动控制率。
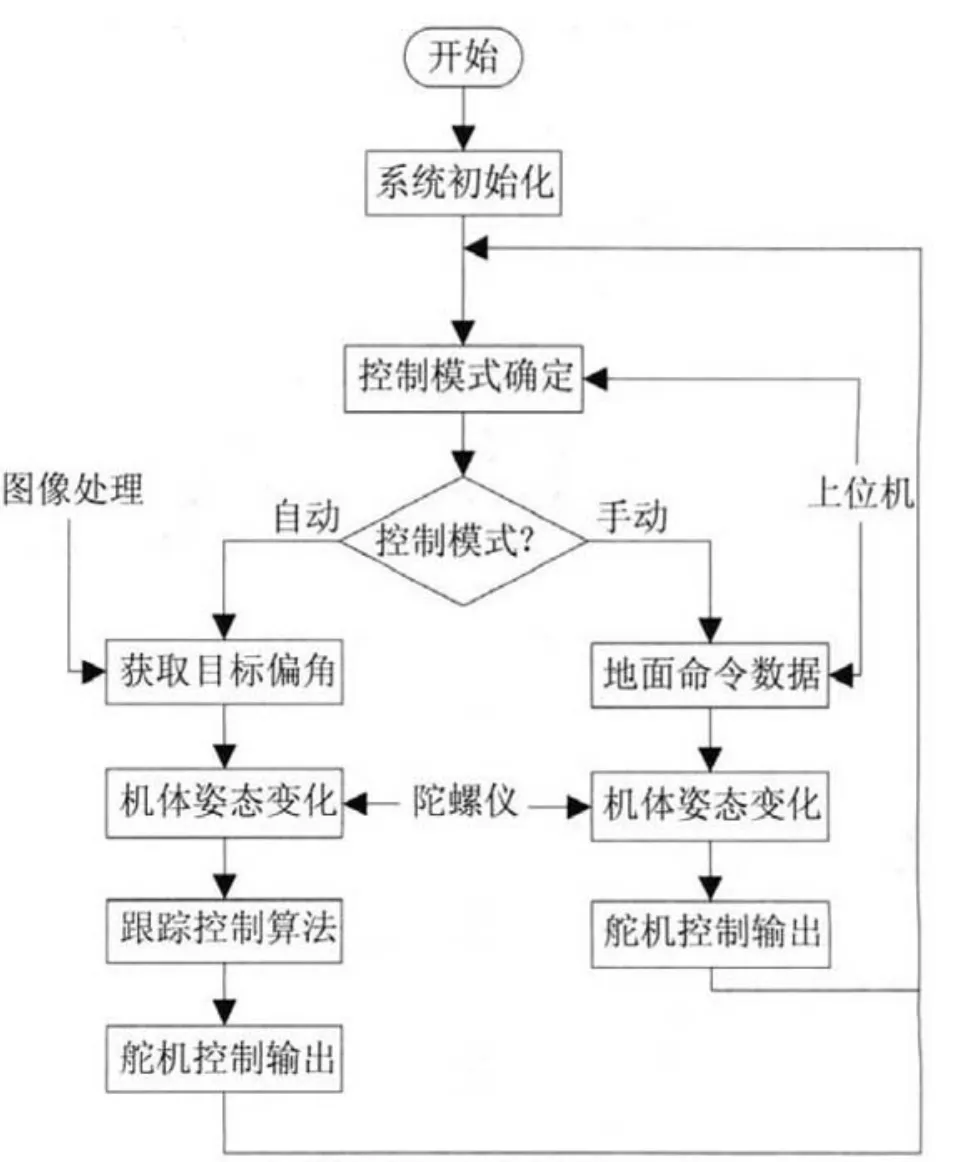
图5 系统软件流程图
4 实验调试
主要从软件UART和控制系统两个方面进行了实验。
4.1 软件UART
由于本系统中采用软件模拟方式扩展了UART,而软件UART的运行需要占用一定的机时,因此需要平衡通信速度和硬件机时占用。
实验条件:跟踪控制板上采用了22.1184Mhz的晶振。
实验方法:上位机对控制板的软件UART连续不间断地发送数据。MCU采用查询方式,软件UART在接收到每个字节数据的同时,把接收到的每个字节数据立即用软件UART的发送端回发给上位机,然后对比上位机发送的数据和接收到数据。如图6所示。
根据实验结果可知,在时钟频率为22.1184Mhz的条件下,该软件UART可对绝大多数的应用提供全双工模式下38.4Kbps的波特率支持。
而本系统对系统的实时性要求很高,为此,将此软件UART配置给数据传输压力最小的无线通信模块,同时将波特率设为19.2Kbps,以满足系统的响应速度。
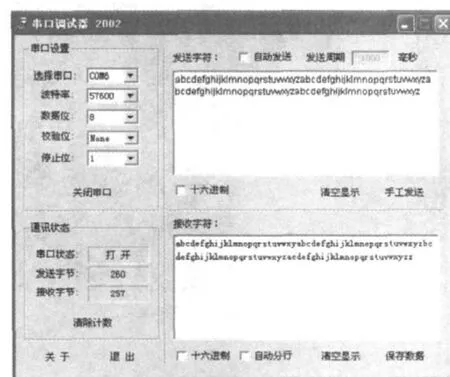
图6 实验时用到的串口调试器

表1 实验结果表
4.2 控制板调试
控制板的调试采用上位机定时发送目标偏角数据给跟踪控制系统,由控制系统根据偏角数据控制舵机的转动。
考虑到我国电视采用PAL制式,每秒钟能产生25帧图像。这里就假设图像处理系统能够每秒处理25帧图像,即每秒钟给出25组目标物体的偏角数据。
实验方法:上位机每隔40ms发送一组偏转数据给运动跟踪控制板,观察舵机的运动。
结果表明,舵机反应迅速,无滞后响应现象。
5 结论
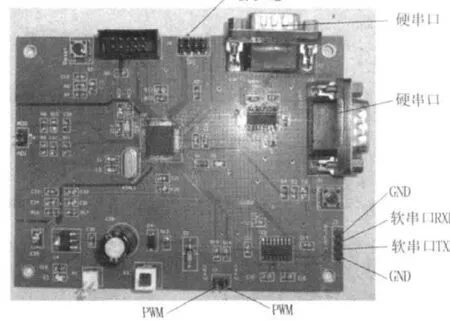
图7 运动跟踪控制板
结合仿生眼运动的建模和对模型的离散化控制,该系统能够很好模仿人眼的运动,且能够达到很高的精度。同时通过实验,初步表明,该跟踪控制系统能够满足仿生眼系统对实时性的要求。
[1] 邹海荣,龚振邦,罗均.仿生眼的研究现状与发展趋势[J].机器人,2005,27(5):469-474.
[2] Zhang X L,Wakamatsu H. An Unified Adaptive Oculomotor Control Model[J].International Journal of Adaptive Control and Signal Processing,2001,15(7):697-713.
[3] 傅湘国.地面目标低空跟踪伺服云台控制系统研究[D].上海:上海大学,2007.
[4] 潘琢金.C8051F020/1/2/3混合信号ISP FLASH微控制器数据手册[Z].Rev 1.4.新华龙电子有限公司.2005.
[5] 潘琢金,孙德龙,夏秀峰.C8051F单片机应用解析[M].北京:北京航空航天大学出版社,2002.
[6] Xie S R,Gong Z B,Ding W,et al.Detection and Tracking of Moving object in Visual Tracking from a Low-Altitude Flying Helicopter[A].Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics[C].Sanya:IEEE,2007:178-182.
[7] MicroStrain Inc.3DM-GX1 Datasheet[Z].2005.
[8] MaxStream Inc.XStream-PKG-RTM RS-232/485 RF Modem Product Manual[Z]. 2006.
猜你喜欢
现代电子技术(2022年20期)2022-10-15
智能制造(2020年5期)2020-07-03
自动化学报(2019年6期)2019-07-23
电子制作(2019年23期)2019-02-23
科教导刊·电子版(2018年27期)2018-10-31
电子制作(2018年1期)2018-04-04
计算机系统应用(2018年1期)2018-02-07
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
制造业自动化(2017年2期)2017-03-20
