基于矢量细分和占空比的模糊直接转矩控制
2010-07-09 13:31蔡斌军孙耿丽
湖南工程学院学报(自然科学版) 2010年1期
蔡斌军,孙耿丽
(1.湖南工程学院应用技术学院,湘潭411101;2.湖南工程学院应用技术学院电气工程0783班,湘潭411101)
0 引 言
传统的直接转矩控制以转矩和磁链的独立跟踪自调整,借助于转矩Bang-Bang控制来实现PWM控制策略和高动态性能.逆变器的器件开关频率决定于转矩和磁链滞环比较器的环宽和翻转速度,因此开关频率不固定.不固定的开关频率会使器件的开关能力得不到充分的利用[1].在一个采样周期只有单一电压矢量作用,且只有有限且不连续的电压空间矢量的选择,不可避免会引起转矩急剧的增加或减少[2].为了固定开关频率,减小转矩脉动,选用一种空间矢量细分的直接转矩控制新方案,将六个基本的空间矢量细分为12个空间矢量,对12个空间矢量重新优化组合,得到直接转矩控制优化开关表.通过磁链偏差和转矩偏差得到的开关表结果,并不是直接地指示逆变器的下一个开关状态,而是采用空间矢量脉宽调制的方法得到固定频率的开关信号.并且使用占空比方法控制空间矢量在一个采样周期内的作用时间,由模糊控制器得到空间矢量的占空比[3].
1 直接转矩控制原理
直接转矩控制系统采用空间矢量的数学分析方法,以定子磁场定向,建立在静止的α-β正交定子坐标系上,异步电动机在α-β坐标系上的数学模型如下:

图1 传统直接转矩控制系统框图
磁链方程为:

其中 ,np为电机的极对数;和为的α轴和β轴的分量;和为的α轴和β轴的分量.
2 空间矢量细分原理
为了增加有效的空间矢量,本文利用空间矢量调制的方法生成六个新矢量.空间矢量合成的表达式为:

本文利用相邻的2个矢量进行合成,合成矢量的方向为相邻2个空间矢量的角平分线.例如用电压矢量V4和V6合成V 46.这样共有12个有效矢量,6个基本矢量,6个合成矢量.空间电压矢量如图2所示.为了便于选择不同的矢量电压,将整个空间分为12个扇区,分别用s1~s12表示.
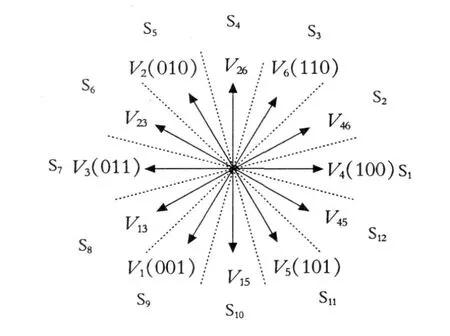
图2 空间电压矢量及其对应扇区示意图
3 优化开关选择表
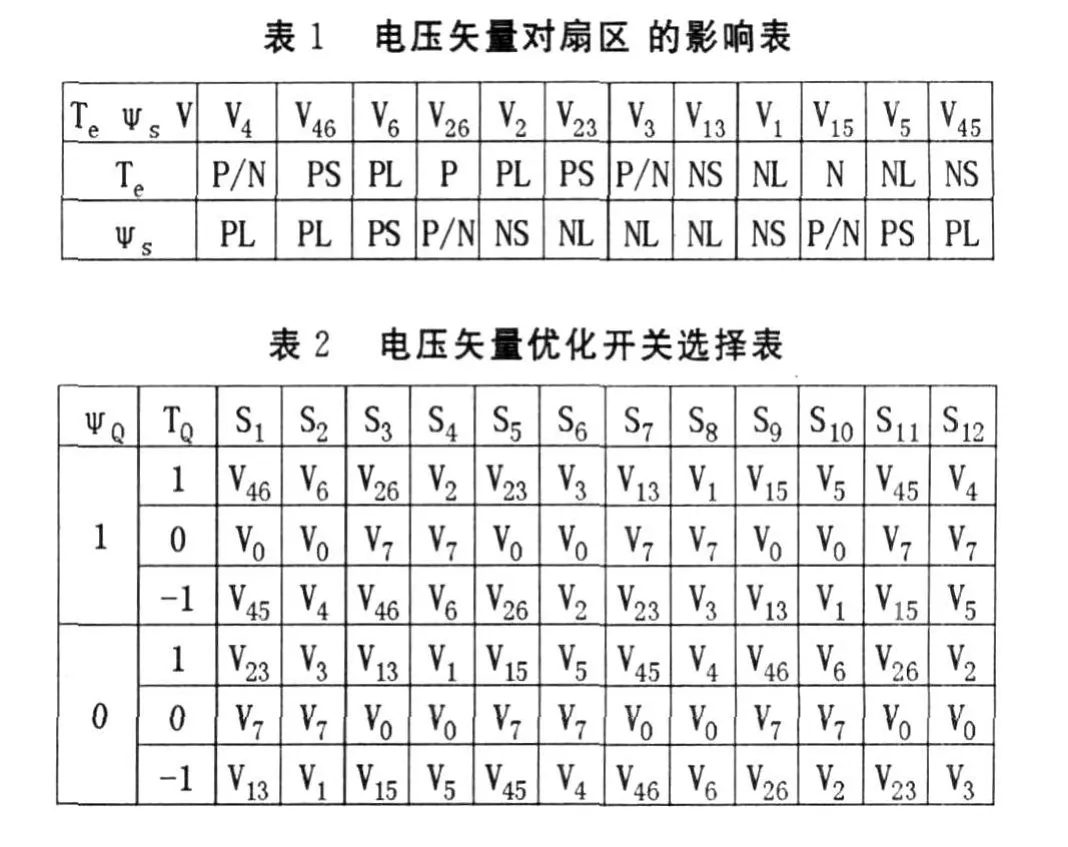
首先分析有效电压矢量对磁链和转矩的影响[4].假设磁链位置在扇区s1,且逆时钟旋转,运用模糊控制的模糊子集(PL、PS、NS、NL 、P/N)来表示影响程度.PL:控制量增加大;PS:控制量增加小;NS:控制量减少小;NL:控制量减少大;P/N:影响不确定.各电压矢量对扇区的影响如表1所示.根据表1确定优化的电压矢量,优化开关选择表如表2所示.当有两个矢量同时满足要求时,选取转矩改变小的矢量.零电压矢量V0、V7的选择以减少开关切换次数为原则.转矩调节器采用三点式调节,TQ=1、-1、0分别表示需要增加转矩、减小转矩、和保持转矩不变.磁链调节器采用二点式调节,ψQ=1、0分别表示需要增加磁链、减小磁链.
?
4 占空比的模糊实现
在占空比控制中,所选的工作电压矢量只在该采样周期中作用一部分时间,使转矩增加到其参考值,而剩余的时间选择零电压矢量,防止转矩过大的增加,产生转矩脉动.工作电压矢量作用时间占采样周期时间比率称作占空比δ,其取值范围是0~1.如何确定占空比δ是占空比控制技术的核心问题.因为每一个开关状态的占空比数学模型非常难建立,是转矩误差(Ete=te-tref)、磁链误差(Eψ=ψs-)的非线性函数.所以使用模糊控制确定 δ.为模糊控制器的输入变量,占空比δ为输出变量.本文对和δ在论域上各定义了三个模糊子集(LE,ME,SE)属度函数如图3所示.
模糊规则采用IF-THEN形式表示,第i条规则可以表示为:

式中:A、B、u为磁链误差、转矩误差、以及占空比的子集变量.
本系统共有 9条这样的推理规则,采用Mamdani模糊推理法,取最大隶属度对应的输出量为逆变器的开关量输出,其输出的隶属度如式(8)所示

本系统的模糊控制表如表3所示.

?

5 仿真实验
5.1 仿真模型
MATLAB组成异步电动机调速模型如图4所示.

图4 直接转矩控制系统仿真模型图
仿真实验中电机的主要参数为:Pn=22 k W,

5.2 仿真结果及分析
在图5(a),图5(c)显示了传统直接转矩控制的仿真结果.图5(b),图5(d)显示了改进了的仿真结果.图5(a)中的磁链轨迹近似圆形,但是有较大的波动,图5(b)中的磁链轨迹有明显改善,较好的逼近圆形,且波动较小.图5(c)中的转矩脉动较大,图5(d)中的转矩脉动大大减小.
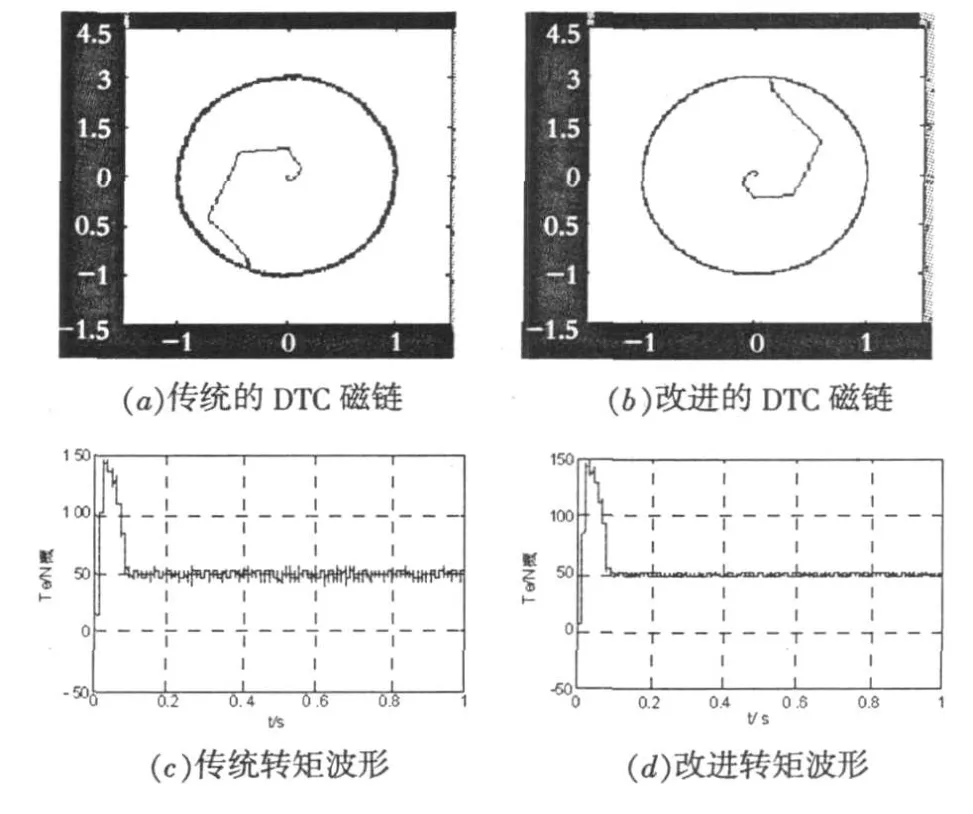
图5 仿真结果波形图
6 结 论
针对异步电动机传统直接转矩控制系统存在的问题,提出了一种基于空间矢量细分和占空比控制的直接转矩控制方法,并将此方法应用到异步电动机调速系统中.通过系统仿真研究,较大的减小了直接转矩控制的转矩和磁链脉动,使调速系统获得了较好的静动态性能和较高的调速精度.另外,逆变器开关频率固定化.
[1]祝龙记,王汝琳.采用矢量细分的异步电动机直接转矩控制系统[J].微特电机,2004,(6):29-32.
[2]魏 欣,陈大跃,赵春宇.一种基于占空比控制技术的异步电机直接转矩控制方案[J].中国电机工程学报,2005,25(14):93-97.
[3]Mir S,Elbuluk M E.Precision Torque Control in Inverter-fed Induction Machines Using Fuzzy Logic[C].Atlanta,GA,USA:26th IEEE Power Electron Spec Conf(PESC),1995.
[4]郭前岗,李耀华,孟彦京,陈 明.电压矢量对直接转矩控制中电磁转矩的影响及其仿真研究[J].电气传动,2005,35(8):9-12.
[5]杨家强,黄 进.感应电动机直接转矩控制转矩脉动最小化方法研究[J].电工技术学报,2004,19(9):23-29.
[6]李 夙.异步电动机直接转矩控制[M].北京:机械工业出版社,1999.
[7]李永东.交流电机数字控制系统[M].机械工业出版社,2002.
猜你喜欢
南北桥(2022年2期)2022-05-31
华人时刊(2020年23期)2020-04-13
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15
电测与仪表(2016年10期)2016-04-12
专用汽车(2016年9期)2016-03-01
计算机技术与发展(2016年10期)2016-02-27
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
专用汽车(2015年2期)2015-03-01
电测与仪表(2014年23期)2014-04-04