InertiaCube2在训练仿真系统中的应用研究
2010-08-18 00:59史连艳宋文渊姚志敏
电子设计工程 2010年1期
史连艳,宋文渊,姚志敏
(军械工程学院 导弹工程系,河北 石家庄 050003)
某型防空导弹装备系统复杂,技术含量高,价格昂贵。导弹射手在面对广阔的空域、复杂的敌情,各种类型的高速飞行目标时应具备超强技能。而导弹本身是一次使用性产品,因此导弹射手日常训练都是在模拟训练仿真系统中进行,故训练仿真系统的逼真程度决定导弹射手的训练效果,而正确、合理评定训练成绩也为受训射手改进操作提供依据[1]。由于,该型防空导弹装备是“发射后不管”的,因此该装备的训练是以发射前的一系列操作为主,包括武器系统展开、搜索目标、瞄准目标、系统供电、发射等,其中主要采集两类数据:受训射手各个动作的时间量和导弹发射前给定的前置量(角度量)。为使导弹出筒后便于控制,导弹弹道起始偏差减小,导引精度和命中概率提高,在发射前应施加一定的角度前置量,即目标瞄准点的提前量,该前置量分为高低角和水平角。这里给出基于InertiaCube2的前置量测量系统设计方案。
1 InertiaCube2传感器
1.1 InertiaCube2参数
InertiaCube2是三自由度方向的跟踪系统[2],具有反应快、跟踪范围广以及跟踪过程连续平滑等优点,能够在3个垂直坐标轴上探测旋转角速度、重力和地球磁场。综合旋转角速度得到传感器的测量方位信息,包括偏航角,俯仰角,滚转角。InertiaCube2主要性能指标如下:质量为 25 g;体积为(28.89×24.38×33.91)mm3;角分辨率为 0.01°~0.05°RMS;最小反应时间为2 ms;静态精度为1°;动态精度为 3°;串行口更新速率为 180 Hz;最大角速率达到 1 200(°)/s;测量范围为 0°~360°。
1.2 InertiaCube2工作原理
图1为InertiaCube2功能示意图。在3个互相垂直的坐标轴上分别安装3个速率陀螺、3个加速度计和3个磁传感器。角度测量是由惯性陀螺和线加速度计实现,而磁传感器用于偏航漂移校正。
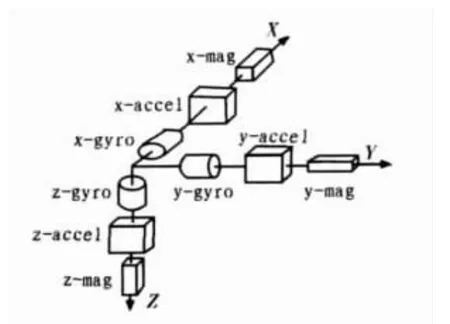
图1 InertiaCube2功能示意图
2 训练仿真系统硬件组成
图2为训练仿真系统的硬件组成框图。
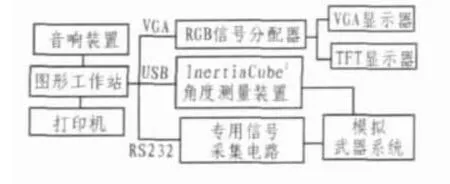
图2 训练模拟器硬件组成框图
图2中,图形工作站运行训练仿真软件[3-4],通过多媒体技术控制音响系统模拟背景声音和导弹声音,视景画面通过RGB信号分配器送到监视器和液晶显示器上,供射手瞄准,通过专用信号采集电路采集射手训练过程中所有动作,并以命令码方式由RS232串行接口发送到图形工作站,仿真软件记录命令码[5],以作为成绩评定依据;InertiaCube2角度测量装置将导弹方位、高低角等数据实时发送至图形工作站,软件根据导弹瞄准方向与飞机位置进行计算,如果落入瞄准区内即可控制产生声光信息通知射手已发现目标。
3 基于InertiaCube2的角度测量系统
3.1 InertiaCube2模块安装
InertiaCube2有RS232或USB两种简单电气连接方式与主机连接,而使用螺丝或螺钉将其紧固在模拟装备上,其基面应与地面平行。这里针对仿真武器系统的特点,并考虑到InertiaCube2需测量弱地磁信号,因此将其安装在发射筒尾部。这样可避免筒内中前部电子元件与线路的电磁效应影响到InertiaCube2测量,若将其安装在中部,则转动中心间距r较小,而待测角度ω=v/r,故测量结果将受到影响。
3.2 基于InertiaCube2的数据采集
随InertiaCube2配套提供有驱动程序、用于读取测量数据的函数库以及其他文件[6]。其中,main.cpp为主循环程序,所有应用程序调用都从该程序开始;isense.cpp为动态链接库的入口程序,与所有编译器接口兼容,不仅仅是VC++6.0的入口程序;isense.h为头文件,包含InterSense所有跟踪器的函数定义和描述;types.h为头文件,定义数据类型;isense.dll为InterSense动态链接库,安装于Windows系统目录或应用程序工作目录下。动态链接库中的主要函数及其功能如下:
1)ISD_TRACKER_HANDLE ISD_OpenTracker (HWND hParent, DWORD commPort, BOOL infoScreen, BOOL verbose)当打开跟踪器成功时,函数返回非零的句柄,用于其他函数功能指向该跟踪器;当打开跟踪器失败时,函数返回负值。其中,hParent为扩展功能时使用,目前未用;comport为当参数非零时,函数查找相应的RS232接口,否则查找USB接口;infoScreen为未用;verbose为TRUE时,函数打印动态链接库版本信息。
2)BOOL ISD_CloseTracker(ISD_TRACKER_HANDLE handle)该函数用于关闭跟踪器,释放打开时所申请的资源。其中,Handle为打开跟踪器函数返回的句柄。
3)BOOL ISD_GetTrackerData(ISD_TRACKER_HANDLE handle,ISD_DATA_TYPE*data)得到跟踪器测得的3坐标数据。其中,Data保存3个坐标数据,符合ISD_DATA_TYPE数据结构定义。
4)BOOL ISD_GetCommInfo(ISD_TRACKER_HANDLE handle, ISD_TRACKER_INFO_TYPE*tracker)可得到跟踪器的设备的信息和通讯信息。其中,Tracker符合ISD_TRACKER_HANDLE定义的结构。
测量过程如下:在程序进入时用ISLIB_OpenTracker函数打开跟踪器;在Timer定义的事件中用ISLIB_GetTracker-Data函数读取当前角位置;程序退出时采用ISLIB_Close-Tracker函数关闭跟踪器。
3.3 角度前置量的解算方法
InertiaCube2角度测量以三自由度速率陀螺仪的测量解为主。三轴加速度计和三轴磁传感器用来敏感地球重力场和地球磁场,进而消除陀螺仪的累积漂移误差。速率陀螺仪测得的数据与加速度计测得的数据送入Kalman滤波器进行误差估计,经角度综合后补偿,从而得到精度较高的俯仰角和偏航角数据。InertiaCube2磁场传感器输出数据,经航向误差估计,补偿陀螺仪解算得到的航向角误差,最终得到综合的角度数据,这里由于模拟训练装备无自旋状态,故对滚转角不予测量、解算。图3为角度解算方法框图。
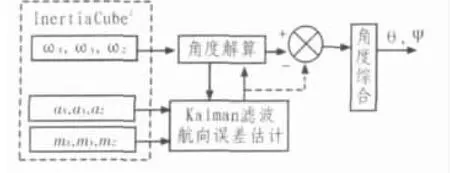
图3 角度解算方法框图
从InertiaCube2磁场传感器输出到Kalman滤波器的虚线表示磁传感器的使用可能会随时失效,即只有当陀螺仪失效或陀螺仪航向误差较大时该项补偿起作用。对于俯仰角的误差补偿加速度计的测量已足够,地磁传感器的测量仅仅用于偏航方向的校正。转台实验数据见表1。
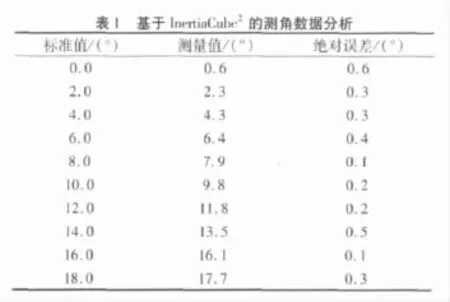
因为导弹射手应给出的前置量是一个估计值,故测角精度达到1°。由表1可见,该测角系统满足模拟训练的要求。
4 结论
程序对所有测量、解算得到的俯仰角和偏航角数据按表1中的标准对照给出评分成绩,并以数据库的形式存储在硬盘上。其中误差在2°以内为优秀,2°~3°之间为良好,超过3°为不及格。最后再综合时间量成绩评定给出导弹射手完整的训练成绩。该型号导弹武器装备训练仿真系统已投入使用。从使用效果及用户评价来看,无论是仿真的逼真性,测量系统的精度,或是成绩评定的科学性均满足训练使用要求。
[1]史连艳,宋文渊.便携防空导弹训练仿真系统成绩评定方法[J].计算机仿真,2004,22(5):25-27.
[2]InterSens.Product manual for use with InertiaCube2serial and USB interfaces[R].InertiaCube2Manual Doc.No.072-IC210-0J01.
[3]马立元,李增瑞,王 妍.战术导弹概论[M].北京:兵器工业出版社,1997.
[4]郝永生,李洪儒,史连艳.仿真与模拟训练技术[M].石家庄:军械工程学院,2003.
[5]郭齐胜.系统仿真[M].北京:国防工业出版社,2006.
[6]祝常红.数据采集与处理技术[M].北京:电子工业出版社,2008.
猜你喜欢
太阳能(2022年3期)2022-03-29
中学生数理化·八年级物理人教版(2021年5期)2021-11-22
军事文摘(2020年14期)2020-12-17
太阳能(2020年3期)2020-04-08
当代工人·精品C(2019年2期)2019-05-10
兵器知识(2019年1期)2019-01-23
小哥白尼(趣味科学)(2018年5期)2018-06-21
足球周刊(2017年22期)2018-04-03
计算机应用与软件(2017年7期)2017-08-12
军营文化天地(2017年12期)2017-03-01