
异步电机直接转矩控制系统起动方法的研究
2010-09-13 13:07武德祥张爱玲许连丙王建华
太原理工大学学报 2010年4期
武德祥,张爱玲,许连丙,王建华
(太原理工大学电气与动力工程学院,太原030024)
直接转矩控制(Direct Torque Control简称DTC),是20世纪80年代首先由德国学者提出,其主要原理是根据磁链和转矩的状态选择电压空间矢量,进而决定逆变器的开关状态,把磁链和转矩控制在一定容差范围内,达到对磁链和转矩的直接控制。直接转矩控制一经提出,很快因其简单的控制思想、简洁的系统结构、快速的转矩响应得以快速发展[1,2]。
从直接转矩控制技术问世以来,人们的大量研究集中于其低速性能的改进,对起动方法的研究相对较少,文献[4]提出了三种起动方法,分别是串行、并行、混合起动。但三种方法起动电流均较大,必须插入零矢量将起动电流限制在允许的范围之内,从而使系统编程复杂。笔者提出两种简单、有效的起动方法,其中磁链优先法除了可以限制起动电流,减小起动时间外还可以改善系统的稳态性能,减小磁链和转矩脉动;斜坡函数法通过改变速度给定的斜率来调节系统的起动时间和控制起动电流。实验结果表明,磁链优先法起动电流小,起动时间短;斜坡函数法可根据负载的需要调节起动时间并有效限制起动电流。两种方法在系统实现时均无需增加系统的复杂程度。
1 直接转矩控制的基本原理
感应电机的磁链和转矩公式:
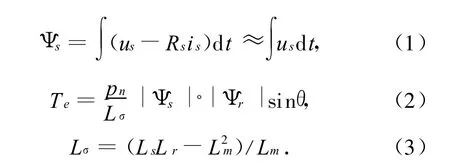
式中:us,is,Rs分别为定子电压、定子电流、定子电阻;Ψs,Ψr分别为定子、转子磁链;θ为定子磁链与转子磁链的夹角;pn为电机极对数;Ls,Lr,Lm为定、转子自感及互感。
由式(1)、(2)可知,保持定子磁链幅值近似不变,控制定子绕组的电压空间矢量u s来控制定子绕组磁链 Ψs的旋转速度,就可以改变定转子磁链夹角θ的大小,达到控制转矩的目的。

图1 直接转矩控制结构框图
图1为基于开关表的传统直接转矩控制的结构框图,从图中可以看出,在直接转矩控制系统中,首先需要计算定子磁链及其所在的扇区以及电磁转矩,然后把定子磁链和电磁转矩分别与它们的给定值进行比较,再把偏差与各自的滞环相比较,根据滞环比较器的输出和此时磁链所在的扇区确定当前输出的电压矢量开关状态,从而控制电机。
空间矢量的选择方法如表1所示,表中CΨ,CT为滞环比较器的输出,其值为0时代表给定值小于反馈值,需要减小转矩(或磁链),为1时代表给定值大于反馈值,需要增大转矩(或磁链)。例如 Ψs在Ⅰ扇区,假定磁链逆时针旋转,如图2,当 Ψs需要增大,转矩也需要增大,则选择电压矢量V2。

图2 电压空间矢量

表1 直接转矩控制电压矢量选取
需要说明的是,在表1中,当需要减小转矩时,都选择了零矢量,而没有考虑磁链调节器的输出。原因在于:
1)磁链本身的波动很小,一两拍内不控不会对磁链的轨迹造成多大影响。
2)如果选择滞后矢量,虽然兼顾到磁链的控制,但对于转矩来说,施加的结果造成转矩波动大,从而使电流和转速的波动大,影响了系统的稳态性能。所以,一般情况下,应优先考虑转矩[5]。
2 起动方法研究
对电机起动性能得要求是起动转矩大,起动电流小,对动态性能要求高的负载还要求起动时间短,超调小。根据对磁链、转矩控制方案的不同,起动方法也不同。针对不同的负载性质提出磁链优先和斜坡函数起动两种方法,并和串行[2]起动进行对比。
2.1 磁链优先法
在直接转矩控制系统中,一般情况下应优先考虑转矩。但是,在磁场尚未建立或者磁链偏离给定值过大时,就不能优先考虑转矩了。因此在起动时,不考虑转矩控制,首先使磁场建立起来即磁链优先。
笔者采用的方法是,当磁链比给定值小很多时,采用与磁链(位于k扇区)处于同一扇区的电压矢量(V k),使磁链快速增加;当磁链比给定值大很多时,采用与磁链间隔两个扇区的矢量(Vk+3),使磁链快速减小。这样,系统运行时有两张开关表,一张是转矩优先开关表,如表1;另一张是磁链优先开关表,如表2。起动时磁链为零,选择磁链优先开关表建立磁链。当磁链满足条件时,再优先考虑转矩。
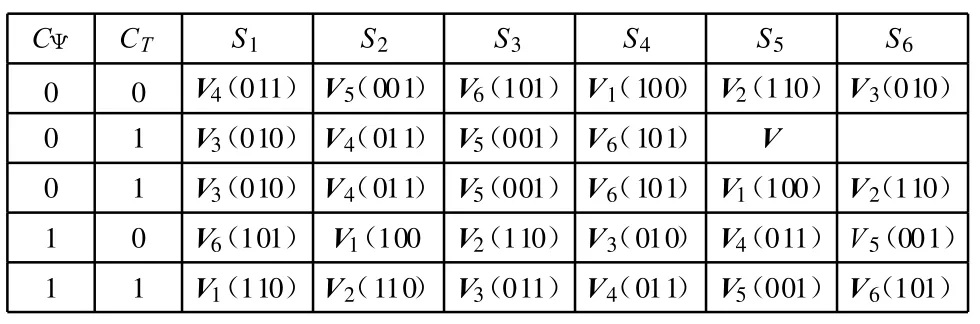
表2 磁链优先控制电压矢量选取
2.2 斜坡函数法
斜坡函数法是用斜坡函数来产生转速给定值,斜率可根据负载需要调节。与转速给定为阶跃函数的情况相比,由斜坡函数给定的转速与实际转速的偏差始终较小,根据开关表所选择的电压矢量不会使系统过流。
2.3 串行起动法[4]
这种方法是把起动过程分为两个步骤,首先调节磁链,使其幅值在最短时间内达到参考值,然后再调节转矩。在起动初始时刻,选择电压矢量 V1(100),此时磁链矢量与V1同向,幅角为零,幅值增加速率最大,直到磁链达到额定值。这期间相当于直流电压作用于电机的定子绕组上,为了限制起动电流,需要加入零矢量。实现的方法是检测定子电流将其和给定值比较,若超过给定值则施加零矢量。这个过程中磁链幅角一直为零,所以转矩为零。待磁链达到给定值后,使磁链以最大速度转动,转矩快速达到设定值。转矩调节电压矢量选择如表3所示。综上所述,该方法需要专门编制一段程序来解决起动问题。

表3 串行起动法转矩调节开关表
3 实验结果及分析
在基于TMS320LF2407 DSP的变频调速实验平台上对上述三种起动方法进行了对比。实验系统由数字信号处理器(DSP),整流模块,智能功率模块(IPM),光电编码器,霍尔电流传感器,CAN/USB通讯模块等组成,它励直流发电机作为负载。逆变器采用了日本三菱公司的PM25RSB120IPM智能功率模块。试验结果如图3所示。实验时给定定子磁链0.99 Wb,给定转速1 000 r/min。直流发电机带电阻负载起动,由直流发电机原理可知,转速上升过程中电磁转矩是变化的。实验数据通过CAN/USB接口传到上位机。
图3-a,3-b,3-c分别表示上述三种起动方法起动过程中定子磁链幅值、定子电流、转速随时间变化的波形。由图3-a可见,从磁链建立所需的时间来看,磁链优先法最短,其次是串行法。从起动过程中定子电流的大小来看,斜坡函数法最小,串行起动法在t小于0.01 s时的电流呈锯齿状脉动是由于加入零矢量限流形成的。从起动时间的长短来看,从图3-c可见,串行起动所用时间最短,但斜坡函数法起动过程最为平稳。

图3 磁链优先、斜坡函数、串行起动方法实验结果
4 结论
对比三种起动方法的分析及实验结果可知,磁链优先方法适用于对起动的快速性有较高要求的负载,系统实现时,可以将表1和2两张开关表结合起来使用,当磁链小于某一给定数值时,用磁链优先的开关表,反之转矩优先。该方法无需专门考虑起动问题,使系统简洁明了,且理论和实验都表明该方法还可以有效减小稳态运行时磁链和转矩的脉动。斜坡函数法适用于不要求起动的快速性但要求起动电流小和起动过程平稳的场合。
[1] James N Nash.Direct Torque Control,Inductioon Motor Vector Control Without an Encoder[J].IEEE Transaction On In A,1998,33(2):411-418.
[2] Isao Takahashi,Toshihiko Noguchi.A New Quick-resp onse and high-efficiency control strategy of an induction motor[J].IEEE Transaction On In A,1986,22(5):227-237.
[3] Zolghadri R,Diallo D,Roye D.Start up strategies for a direct torque controlled synchronous machine[J].Proceeding European Conference on Power Electronics,1977,9(3):689-693.
[4] 孙笑辉,韩曾晋.异步电动机直接转矩控制起动方法仿真研究[J].电气传动,2000,30(2):13-17.
[5] 李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[6] 陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2003.
[7] 李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,1999.
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
当代陕西(2019年6期)2019-04-17
商周刊(2018年25期)2019-01-08
传媒评论(2018年5期)2018-07-09
天津诗人(2017年2期)2017-11-29
中国卫生(2016年12期)2016-11-23
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
小说月刊(2014年12期)2014-04-19
