一种城市单路口交通两级模糊控制方法
2010-09-27 01:40卫小伟
电子设计工程 2010年1期
卫小伟 , 常 博
(1.陕西交通职业技术学院 陕西 西安 710018;2.长安大学 电子与控制工程学院,陕西 西安710064;3.长安大学 信息工程学院,陕西 西安 710064)
一种城市单路口交通两级模糊控制方法
卫小伟1,2, 常 博1,3
(1.陕西交通职业技术学院 陕西 西安 710018;2.长安大学 电子与控制工程学院,陕西 西安710064;3.长安大学 信息工程学院,陕西 西安 710064)
依据单路口4个方向车流信息,提出一种单路口交通两级模糊控制方法,采用模糊控制技术,无需建立精确的数学模型,对两相位的交叉路口,是一种基于车辆等待长度的单点信号交叉口交通实时模糊控制方法。根据城市交通实际状况,在考虑每个相位的关键车流和非关键车流的车辆到达交叉口信息的基础上,提出更有效的单路口交通实时模糊控制方法,并对该控制器进行仿真研究,仿真结果达到预期要求。
交通网络;单路口;两级模糊控制
解决交通问题最直接最有效方法是提高交通运行能力。但不可能无限制地修建道路。因此必须利用各种高新技术解决各种道路交通问题。Pappis和Mamdani曾将模糊控制方法用于单交叉口的交通控制,仿真结果表明比传统的控制方法平均减少车辆延误7%左右。徐冬玲等[1]把模糊控制用于单路口信号灯控制,并用神经网络实现模糊控制,仿真表明控制结果合理、迅速。但从其控制规律来看,仍未摆脱感应式控制方式。由于城市道路的交叉路口通常有4个进口,就单车道而言,也有4股车流,若进口道为双车道或3车道,则通过交叉路口的车流便多于4股。显而易见,Pappis法研究的是理想化的十字交叉路口,这实际应用很少,因此,有必要加以改进[2]。这里据城市交通实际状况,在考虑每个相位的关键车流和非关键车流的车辆到达交叉口的信息的基础上,提出更为有效的单路口交通多级模糊控制方法的系统设计方案。
1 单路口交通两级模糊控制
所谓的单路口交通控制即是选择适当的信号配时(或绿灯时间),使交叉口车辆平均延误时间尽可能小。单路口交通控制系统受2个相位的4个方向车流到达率的影响,即该系统含多个系统变量。因此,单路口交通控制系统是一个典型的多变量模糊控制系统。由于模糊控制规则的条数是系统变量个数的指数函数,当系统变量个数较大时,要构造常规的基于规则的模糊控制器十分不易[3]。为此,引入两级模糊控制结构。把对系统性能影响最大的变量视为一级变量,对系统性能影响次之的变量视为二级变量。选择对单路口交通控制系统控制效果影响最大的两相位的关键车流的车辆到达数和绿灯延长时间作为一级变量,由其组成一级模糊控制器;选择两相位的非关键车流的车辆到达数和绿灯延长时间修正量作为二级变量,并组成二级模糊控制器。
以图1路口示意图所示,设十字路口的进口道路均为单车道,有4股车流,每条道路进口装有一个信号检测器,分别检测4个方向的车辆到达信息,且在整个周期保持该信息。由绿灯变为红灯过程中有3 s的黄灯时间,绿灯在黄灯点亮1.5 s后熄灭。检测器和停车线间保持足够距离,能在后续的11.5 s内的4个方向的车辆到达情况传送至控制器[4]。
再假定各方向的车流到达率如图1所示,其中由北向南、由东向西的车流为两个相位的关键车流。根据检测器检测到的两关键车流的车辆到达信息,由模糊控制可得到信号灯延长时间初值e s。
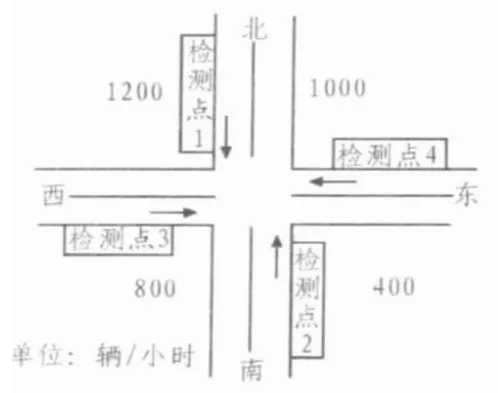
图1 路口示意图
由图1看到:由南向北、由西向东车流为两个相位的非关键车流。若南北方向绿灯,由西向东方向来车比由南向北方向的来车多,当信号灯延长e s,则东西向车辆延误较大。为了使通过交叉口的车辆总延误尽量减小,应适当减少南北向绿
灯时间。若东西向为绿灯,而在e s内,东西向车辆还未通行,则应适当增加东西向绿灯时间,以减少拥挤现象。
单路口多级模糊控制过程:根据4个检测器检测到的各方向车辆到达信息,确定两相位的关键车流和非关键车流。对两相位的关键车流的车辆到达情况实施模糊控制,即经过模糊化、模糊控制规则、模糊判决得到有通行权相位的绿灯延长时间初值e;对两相位的非关键车流的车辆到达情况实施模糊控制,得到绿灯延长时间的修正时间Δe。从而得到控制策略 E,即绿灯延长时间(e+Δe)(这里 0≤e+Δe≤10 s)。 单路口交通多级模糊控制系统结构如图2所示。
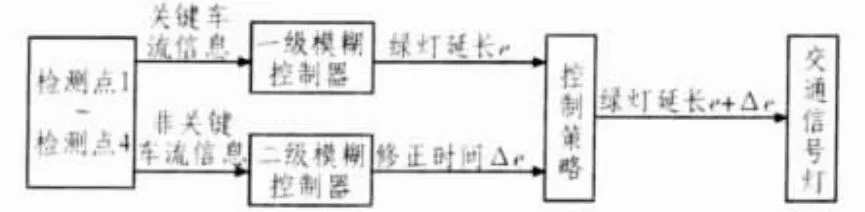
图2 单路口交通多级模糊控制系统结构
图2中,绿灯基本延长时间e由Pappis法确定,即确定构成的论域上的模糊关系;绿灯附加延长时间Δe由有通行权方向的非关键车流确定[5]。
2 模糊控制器的设计
采用两个模糊控制器进行设计,每个模糊控制器由模糊化、模糊控制规则、模糊判决3部分组成,如图3所示。

图3 模糊控制器结构
2.1 一级模糊控制器的设计
一级模糊控制器控制的变量是绿灯延长时间。绿灯时,每10 s控制一次,最多控制5次。本控制器基本思想类似于Pappis和 Mamdani的设计[6]。 其中,模糊输入量为 T(时间),Q(等候车辆数),A(到达车辆数);而模糊输出量为E(绿灯延长时间)。控制规则共25条,每次控制使用5条规则,每个规则是T,Q,A和E间的模糊关系。按最大-最小运算,计算(t,a,q,e)的隶属度。 t为考虑后面第 t s;a 为在后续 t s中,如交通灯不变,则有a辆车通过;q为在后面t s中,如交通灯不变,有q辆车等候;e为交通灯再保持e=t不变。
模糊判决采用最大隶属度原则,即选择使隶属度u最大的绿灯延长时间e为该模糊控制器的输出。
2.2 二级模糊控制器的设计
该控制器的控制变量是由绿灯延长时间的修正量Δe。绿灯时每10 s控制一次。
模糊输入量:Q1(无通行权相位的非关键车流的等候车辆数),Qe(有通行权相位的关键车流在绿灯延长时间e后尚未走完的车辆数);模糊输出量:Δe(绿灯延长时间修正量)。以上模糊集采用语言变量定义。
二级模糊控制器输入红灯相位非关键车流的等候车辆数,绿灯相位关键车流在一级模糊控制器的输出绿灯延长时间e后的等候车辆数的模糊量,通过模糊控制规则,就可得到一个模糊控制策略。模糊输出Δe的模糊量采用最大隶属度原则反模糊化,得到Δe的精确值。
3 仿真实例
假定某信号灯控制的交叉路口,设该路口4个入口的路段均为单车道,路口各方向车辆的到达是随机的,车辆的到达率为0~0.4辆/s,每10 s为一时间间隔,10 s内车流服从均匀分布,路口车辆的最大离开率取1.0辆/s。随机产生东西和南北方向的车辆在10 s内到达分布,即10 s中每秒到达的车辆数,计算各方向前n s内通过停车线的车辆数或等候车辆数(n=1,2,…,10)。假定某车流红灯转变为绿灯后车流以1辆/s的速率离开停车线,计算车辆延误,设:

红灯相位的车辆总延误:

式中,Q1G,Q2G分别表示前绿灯时间红灯相位两个方向未走完的车辆数;,分别表示红灯相位两方向在红灯第n1s内的车辆到达数;n表示该周期内红灯时间。
绿灯相位的车辆总延误:

式中,Q1R,Q2R分别表示绿灯相位两方向在前红灯时间等候的车辆数;,分别表示绿灯相位两方向在绿灯第n2s内车辆到达数;n表示该周期内绿灯时间;当时,z1=1,否则,z1=0;当时,z2=1,否则,z2=0。
由式(1)和式(2)计算第 i个周期车辆总延误 Di,从而计算m个周期每辆车平均延误:

式中,A为m个周期内4个方向到达车辆总数。
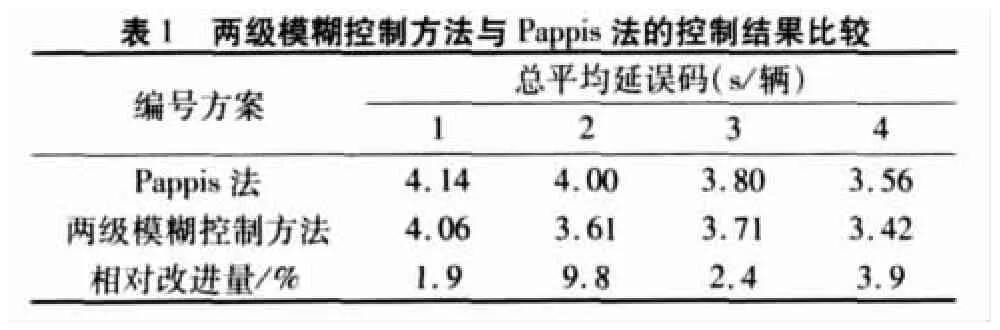
本文将单路口交通信号灯两级模糊控制方法进行仿真实验并与Papppis法相比较,比较结果如表1所示。
?
由表1可以看出两级模糊控制方法车辆的总平均延误为3.7 s/辆,而Pappis法的控制结果为总平均延误3.88 s/辆,两级模糊控制方法平均减少延误 4.5%,可见该方法优于Pappis法。单路口多级模糊控制的仿真程序如图4所示。
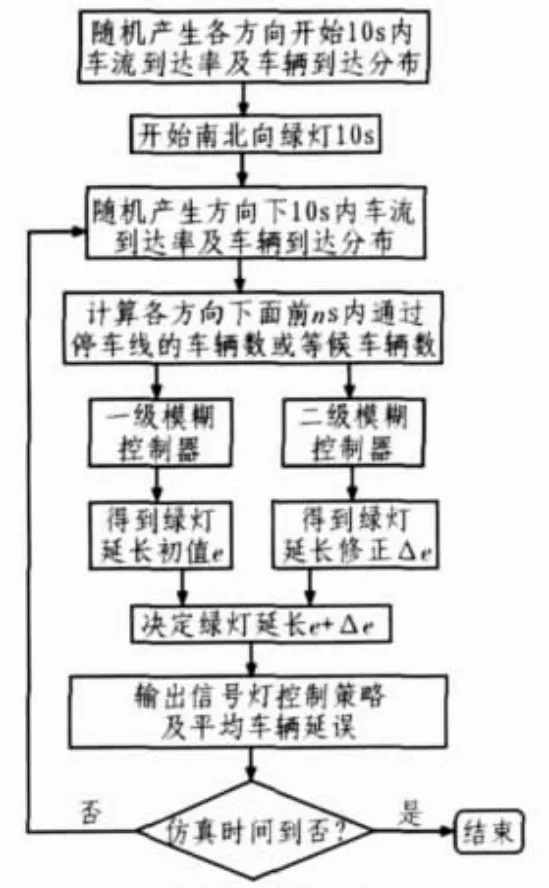
图4 仿真程序
4 结束语
本文提出的多级模糊控制方法适用于各种车流大小随机变化的单路口的交通控制,仿真结果表明该方法有效。由于控制器的输入都是单路口实时数据,无需预测车流,具有较好的实时性。模糊控制便于结合人的思维和经验,并能同时在实时性和精度两方面较好满足控制要求,因而,该方法将会是一种适于城市交通控制的控制方法[7-9]。
[1]翟润平,周彤梅.道路交通控制原理及应用[M].北京:中国人民公安大学出版社,2002.
[2]伍建国.平面交叉口控制策略及仿真系统研究[D].西安:长安大学,2000.
[3]陈小锋.城市交通信号动态优化控制技术研究[D].西安:西北工业大学,2003.
[4]马文阁.基于模糊控制的单交叉口信号控制方法与算法研究[D].大连:大连海事大学,2008.
[5]Pappis C P,Mamdani E H.A fuzzy logic controller for a traffic junct-ion[J].IEEE Transactions on Systems,Man,and Cyber-netics, 1977(7): 707-717.
[6]徐冬玲.交通系统的模糊控制及其神经网络实现[J].信息与控制,1992,21 (2):74-78.
[7]卫小伟,巨永锋.智能交通系统及其在城市道路安全中的应用[J].电子设计工程,2009,17(10):63-65.
[8]何 鹏,刘小飞.基于移动通信的城市停车诱导信息系统设计[J].电子设计工程,2009,17(9):33-35.
[9]隋晓锋,甄国涌.车载视频监控记录系统的设计[J].电子设计工程,2009,17(5):52-54.
A method of two-level fuzzy control for urban traffic single intersection
WEI Xiao-wei1,2, CHANG Bo1,3
(1.Shaanxi College of Communication&Technology,Xi’an710018,China;2.School of Electronic&Control Engineering,Chang′an University,Xi’an710064 ,China;3.School of Information Engineering,Chang′an University,Xi’an710064,China)
Based on traffic information of single-junction of the four directions,a single-junction traffic two-level fuzzy control method is proposed.The method uses fuzzy control technology,and does not need to establish a precise mathematical model.For two-phase cross-junction,the method is a real-time fuzzy control method that is based on the length of vehicles to wait on a single point of intersection traffic signals.Based on the actual situation of urban transport,at the same time critical and non-critical traffic flow of vehicles arrived at the intersection of information considered,a more effective real-time singlejunction traffic control method is proposed.The fuzzy controller is simulated,and the results are quite satisfactory.
transport network; single-junction; two-level fuzzy control
U491
A
1674-6236(2010)01-0081-03
2009-06-21 稿件编号:200906076
卫小伟(1975—),男,陕西西安人,博士研究生,讲师。研究方向:交通智能控制。
猜你喜欢
工会博览(2022年33期)2023-01-12
作文周刊·小学一年级版(2020年40期)2020-10-19
扬子江(2019年3期)2019-05-24
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
西南交通大学学报(2016年3期)2016-06-15
浙江大学学报(工学版)(2016年9期)2016-06-05
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
数学教学通讯·初中版(2015年5期)2015-06-17