
基于冗余容错技术的轨道运输监控终端的设计
2010-10-25 05:31史久根韩江洪
合肥工业大学学报(自然科学版) 2010年7期
史久根, 徐 杨, 韩江洪
(1.合肥工业大学 安全关键工业测控技术教育部工程研究中心,安徽合肥 230009;2.合肥工业大学 计算机与信息学院,安徽合肥230009)
冗余容错技术就是利用硬件冗余法(Hardware Redundancy)或软件冗余法(Software Redundancy)来处理故障,提高系统的可靠性[1-4]。井下机车运输监控系统主要用于对矿井大巷轨道机车运输进行指挥调度、安全监控和生产管理[5]。本文在分析煤矿井下轨道运输监控系统工作现状及存在问题的基础上,提出和设计了一种基于冗余容错技术的监控终端。监控终端构建于嵌入式平台上,通过检测轨道道岔位置来分析井下轨道状态,地面监控中心再发送控制信息对井下轨道运输实施控制,实现轨道运输的优化调度。
1 监控终端工作原理及功能
轨道运输监控终端是一个自带单片机(MC9S08DZ60)的嵌入式设备,设计目标是检测获取的状态信息,对驱动方式做出识别和选择,并接受分站的控制信息,排除井下恶劣环境所引起的干扰,准确完成对轨道转辙机的转动控制以及其它相应的操作。系统原理,如图1所示。
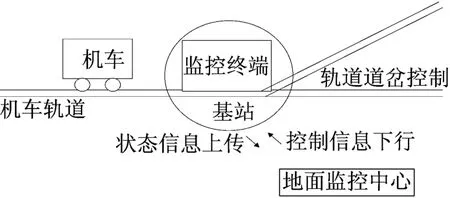
图1 系统原理
监控终端应具有以下基本功能:①正确驱动转辙机的电机,正确判断转辙机的各个工作状态并与一些其它有用状态信息一起,按一定数据结构组织成数据包。②正确接收分站的控制信息,进行控制操作;也可以把状态信息上报给控制分站。③控制终端周期性地发送终端系统的相关信息,并上传到监控中心。如果监控中心确认该信息无需更新时,就不用上传任何状态信息;如果监控中心确认信息需要更新时,即将新的数据返回[6]。④具有一些必要的指示和报警电路,方便本地了解监控终端的工作状态。
2 监控终端硬件的冗余容错设计
设备的硬件设计原理如图2所示,其控制核心采用Freescale公司的MC9S08DZ60单片机。
2.1 电源的安全性设计
CAN(Controller Area Network,简称 CAN)总线是一种非防爆总线,根据本安防爆技术,解决CAN总线电器防爆基本有2种方法:统一供电法和隔离供电法。
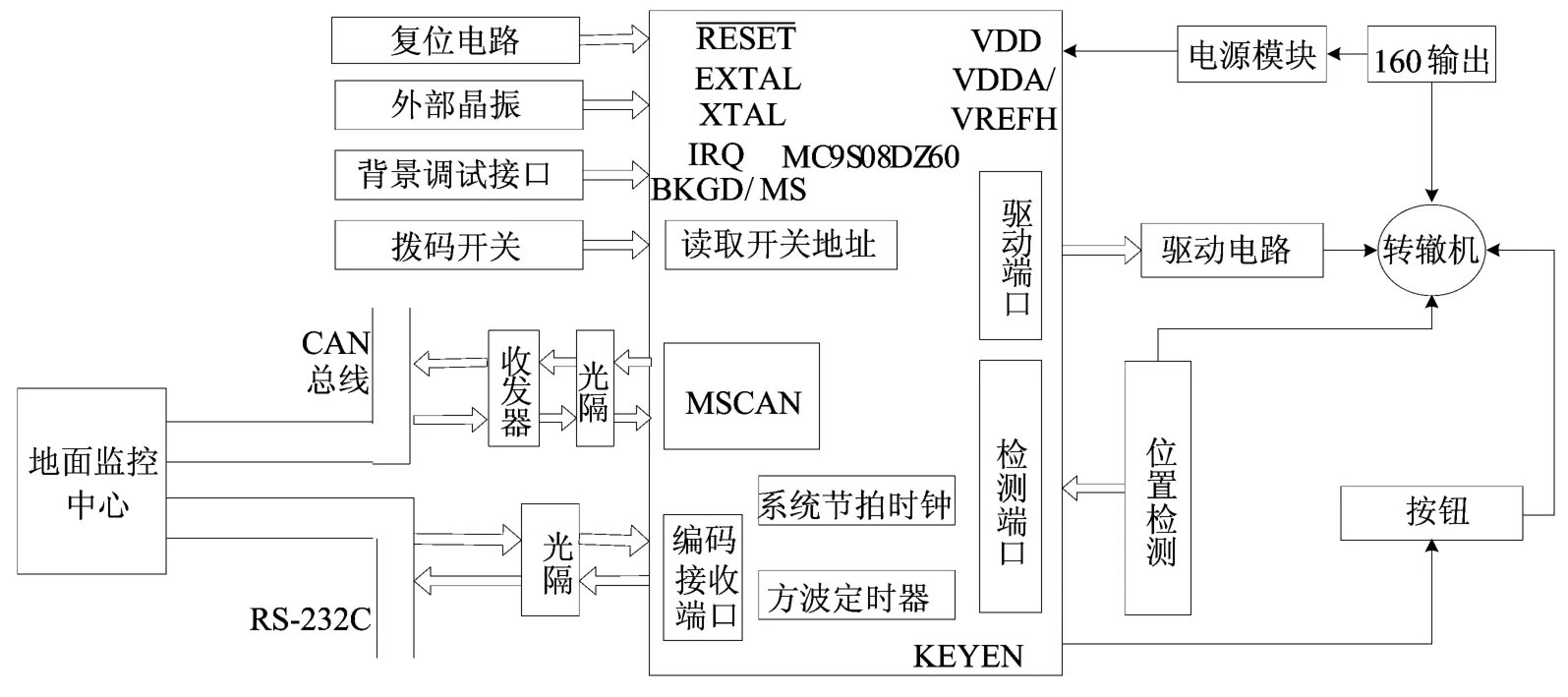
图2 监控终端硬件框图
统一供电就是节点设备的工作电流和传输电流均由总线供给隔爆本安电源。隔爆本安电源是一种允许在瓦斯、煤尘爆炸危险环境中使用的通用本质安全型电源,适用于向矿用本质安全型设备提供电源。隔离供电是将节点设备的工作电源与传输电源分隔开,总线仅提供传输电源,而节点工作电源可就地供给。
该监控终端的设计具有需求上的特殊性,既要实现CAN总线通信,且实现与集散型老系统的兼容,同时又要满足电动和气动2种工作方式。考虑系统的供电较为复杂,安全性能要求较高,所以采用统一供电和隔离供电相结合的安全设计。当系统采用隔离供电法时,节点设备的工作电源使用矿井下正常传输的三相交流电,总线通信电路则使用井下防爆本安电源不间断供电。当矿井系统停止提供交流电时,系统统一使用总线提供的防爆本安电源,节点设备的工作电源由防爆本安电源通过直流转换后提供。
2.2 驱动电路的冗余容错设计
考虑井下的电磁干扰,为防止转辙机发生误动作并将监控终端的误动作率降至最低,监控终端将布尔代数应用到继电器开关电路中,实现了驱动电路的冗余设计。驱动开关电路综合应用了继电器开关电路,利用驱动电路产生的驱动方波对大功率电容进行反复的充放电;充分考虑到井下恶劣环境,大幅度提高了驱动电路的可靠性,对有可能发生的安全故障、干扰都加上了保护措施,使得系统的误动作概率由1/2降低至1/28,尽最大可能减少了道岔转辙机的误动作。
为了提高驱动效率,需选取合适的驱动频率。驱动频率是指驱动电路交替进行充放电的频率f,驱动电路充电电压与驱动频率的关系为:f=1/(2ΔT),UC=U0exp(-1/fRC)。按照表1所列的参数,通过调整ΔT的值,可以得到实际充电电容的理想电压。
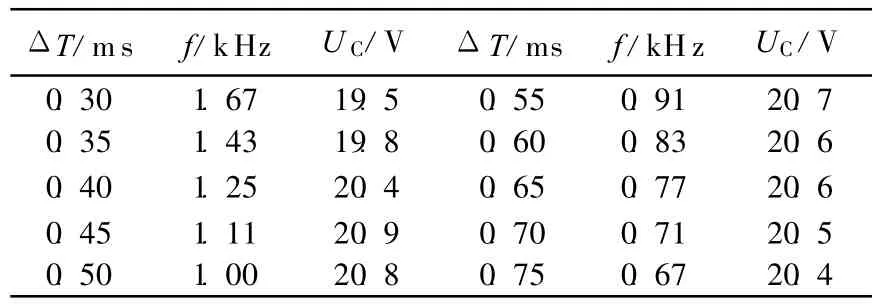
表1 试验结果
2.3 模块通信的隔离设计
通信电缆是网络系统中受干扰最大的部分,通信传输电路和系统工作电路之间要进行光电隔离。
监控终端设计了CAN通讯接口和编码通讯接口:使用CAN通讯接口时,CAN的输入输出功能由CAN收发器 TJA1040完成,将T TL电平信号转化为CAN总线上的差分信号,CAN通信接口电路与MCU外围电路采用高速光电耦合器做隔离,保证井下使用安全;使用编码通讯接口时,地面控制中心通过编码芯片发送编码信号,经过放大、去噪处理后经过低速光电耦合器做隔离,编码通讯接口接收,由软件解码,执行相应操作。
监控终端各电源模块之间还使用磁珠隔离。磁珠的功能主要是扮演高频电阻的角色(衰减器),消除存在于传输线结构(PCB电路)中的RF噪声,RF能量是叠加在直流传输电平上的交流正弦波成分。
3 监控终端软件的冗余容错设计
监控终端软件设计所要实现的是:实时采集运输轨道道岔信息,处理转辙机的各种运行信息,通过CAN协议或串行通信协议接收地面监控中心的控制信息,执行转辙机的转动控制并上报转辙机的转动结果。
监控终端程序主要有以下3部分组成:
(1)系统程序主要由μ C/OS-Ⅱ内核程序和一些内存及通信等资源管理程序构成。
(2)应用程序在这里主要是任务级的用户程序。“驱动服务任务”和“状态查询任务”是经常被激活的任务,具有较高的优先级,所以“解码任务”、“CAN命令解析任务”、“驱动任务”和“状态处理任务”的优先级分别为 3、2、1、4。如图 3所示,清晰地展示了系统任务调度和中断处理ISR之间的关系。
(3)硬件驱动程序是对各类硬件应用模块直接操作的程序,包括响应各类中断服务的中断处理子程序。
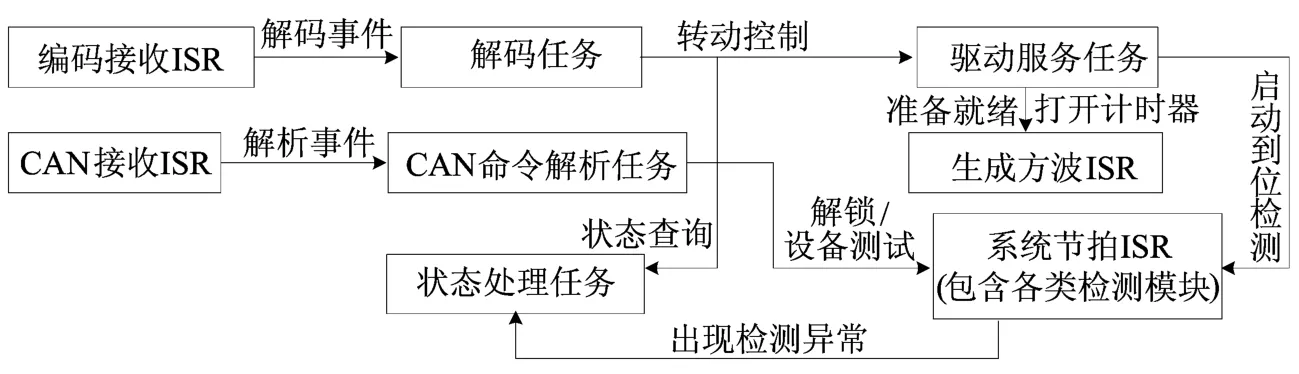
图3 任务调度和ISR关系
井下大量干扰常破坏数字信号的时序、更改单片机寄存器内容,导致程序的非正常运行[7]。软件设计重点需要考虑实时性和可靠性,摒弃传统前后/台系统程序的设计方法。μ C/OS-Ⅱ操作系统的引入,有序地将应用功能模块化、任务化,统一管理中断和任务的实时调度,并提供了一个中断和任务、任务和任务之间稳定可靠的通信机制,使得整个系统的实时性和可靠性大大增强。
监控终端系统程序设计采用软件工程的方法。驱动软件遵循了软件工程“文档驱动”的设计方法,包含了新、老系统的兼容性,转辙机有电动和气动工作方式的可选择性等;进而进入一个总体设计过程,给出系统的程序流程总图,分析中断的种类和划分任务;最后采用IPO图描述的方式,详细设计了程序的每个模块。这使得软件的可读性、可维护性和可靠性都得到加强。
软件容错技术是保证软件质量、提高软件可靠性的一种有效途径和措施[8]。在任务级程序中尽可能多的设立标志判断:定义某单元为标志,在模块主程序中把该单元的值设为某个特征值,然后主程序最后判断该单元的值是否有所变化,不同的说明有误,程序转入错误处理子程序中执行。定义当前采集数据的前1个值或前第3或5个值都可以(不宜太远)为标志判断值。将当前采集的数据与标志数据相比,得到的差值如大于在没有出现干扰信号情况下的2组数据的差值的最大范围,视为有效数据。试验项目的试验数据应在规定的范围内变化,并有一定的变化趋势。根据这一个变化趋势计算出相应的差数值最大范围,作为标志判断的条件之一。
本系统驱动软件对于错误和故障状态采取“抛出异常”的设计方式,把各类错误和故障交由任务级的异常处理模块去处理,并及时通知上位机,这也保障了软件的可靠性。
4 实验测试
在模拟井下运输环境情况下,使用USBCAN模拟地面监控中心对监控终端进行实验测试,得到表2所列的实际测试数据。
表2中,第1组数据是地面监控中心发送的操作命令,第2组是操作完成后监控终端返回给监控中心的信息,第3组是使用按钮进行本地操作成功后返回给监控中心的信息。后面的3组是监控终端检测到异常信息并上报给监控中心的信息,包括第4组没有检测到转辙机位置,第5组没有检测驱动转辙机动作的高压和第6组转辙机转动时间超时。CAN数据帧解析,见表3所列。

表2 监控终端测试的CAN数据帧
通过实验表明,该监控终端可以正常对轨道道岔进行操作,并且在面对各种异常情况时能积极响应和及时上报错误类型至地面监控中心,使得监控中心能及时了解轨道状态并做出相应措施,保障轨道机车的安全运输。
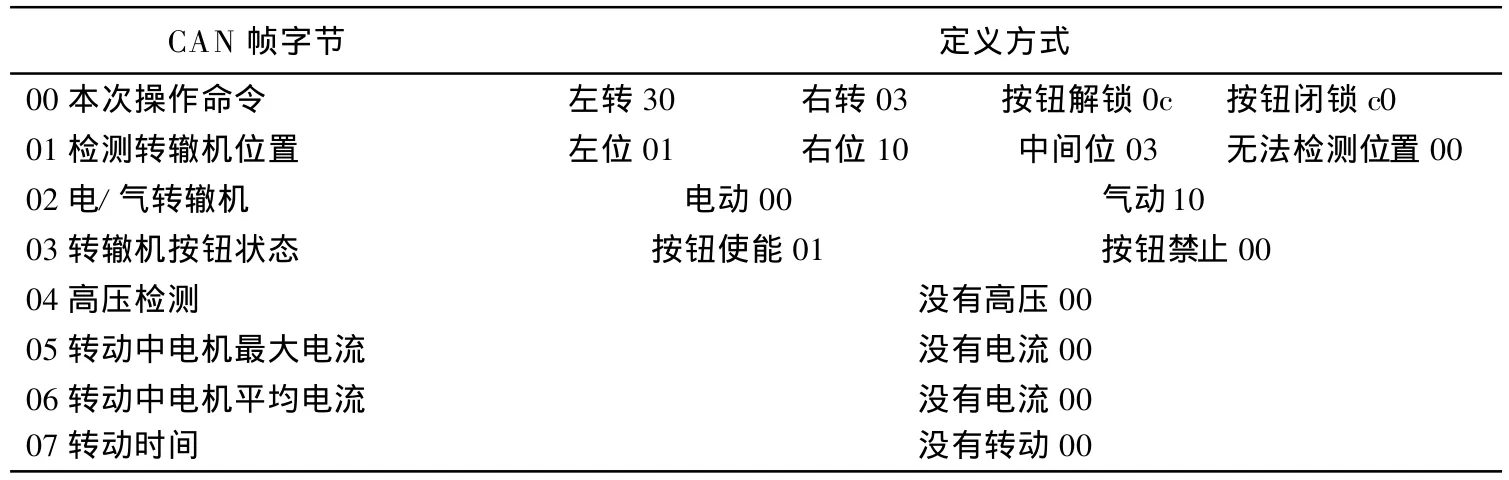
表3 CAN数据帧解析
5 结束语
基于冗余容错技术的轨道运输监控终端的设计充分考虑到矿井下复杂恶劣的环境条件,硬件电路低功耗,本安防爆,具有自保护抗干扰功能,符合井下使用的安全要求;软件设计使用软件工程理念,采用操作系统合理调度控制,具有高容错处理能力和高可靠性。该终端的功能性、可靠性和鲁棒性都大为增强,可以更好地做到轨道安全控制,减少运输事故的发生,满足煤矿安全生产的需求,显著提高矿井的生产效率。
[1] 傅忠传,陈红松,崔 刚,等.处理器容错技术研究与展望[J].计算机研究与发展,2007,44(1):154-160.
[2] 王 剐,刘晓光,董沙莎,等.最优冗余双容错数据布局[J].吉林大学学报:工学版,2007,37(3):611-615.
[3] 向 琳,吴翔虎,廖明宏,等.微小卫星星务计算机系统的容错控制策略研究[J].宇航学报,2005,26(4):400-404.
[4] 王 平,孙 宁,李华旺,等.小卫星星载容错计算机控制系统软硬件设计[J].宇航学报,2006,27(3):412-415.
[5] 韩江洪,蒋建国,方仁忠,等.KJ15A矿井机车运输监控系统[M].北京:煤炭工业出版社,1997:13-26.
[6] Ciardiello T.Wireless communications for industrial control and monitoring[J].Computing and Control Engineering Journa1,2005,16(10):12-15.
[7] 刘广斌,刘 冬,姚志成.单片机系统实时抗干扰技术[M].北京:人民邮电出版社,2004:35-37.
[8] Ly u M R.Handbook of software reliability engineering[M].New York:McG raw-HillCompanies,Inc,1996:215-220.
猜你喜欢
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
现代装饰(2020年8期)2020-08-24
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
铁道通信信号(2019年9期)2019-11-25
铁道通信信号(2018年10期)2018-12-06
电子制作(2016年15期)2017-01-15
铁道通信信号(2016年6期)2016-06-01
