永磁同步电机模糊控制方法研究
2011-01-12 12:24张池
武汉轻工大学学报 2011年1期
张 池
(中船重工 712研究所,湖北 武汉 430064)
随着电力电子技术、新型电机控制理论和稀土永磁材料的快速发展,具有功率密度大、效率高、转子损耗小、转矩惯性比高等优点的永磁同步电动机(Permanent Magnet Synchronous Motor,简称 PMSM)驱动系统已越来越多地应用于商业和工业场合[1-2]。虽然 PMSM有诸多优点,但驱动系统仍需要一个优秀的控制策略,使得该系统有宽调速范围、高稳定性、高效率,以适应高端设备伺服系统、电动汽车等新兴领域的发展要求。参数自整定模糊 PI能够对复杂对象和模型不清楚对象进行简单而有效的控制,它将模糊和 PI控制两者结合,既具有模糊控制灵活而适应性强的优点,又具有 PI控制精度高并且易于实现的特点[3-5]。在分析 PMSM矢量控制的基础上,提出了一种基于自适应模糊 PI的 PMSM定子电流最优控制策略。不仅解决了传统控制方案对电机参数的依赖,亦使系统能迅速响应各种实际工况。采用Matlab仿真软件的 Simulink模块对系统进行了仿真,仿真结果验证了此控制策略的正确性和有效性。
1 PMSM矢量控制原理
交流电机的矢量控制是 1971年由德国 F.Blaschk等人提出的。其基本思想是在交流电机上模拟直流电机的转矩控制规律。在磁场定向坐标上,将电流矢量分解为产生磁通的励磁电流和产生转矩的转矩电流,使两个电流分量相互垂直、彼此独立,因此可以分别加以控制。在永磁同步电机矢量控制系统中,转子磁极的位置用来决定逆变器的触发信号,以保证逆变器输出频率始终等于转子角频率。对永磁同步电机来说,转子磁通位置与转子机械位置相同,通过检测转子实际位置就可知电机转子磁通位置,因此 PMSM矢量变化控制的实质就是控制定子电流空间矢量相位和幅值。
在矢量控制中定子电流的控制模式是多种多样的,且电流控制模式和转子的几何结构影响着永磁同步电机的性能和变换器的容量。这里采用常见的直轴电流 id=0模式,该控制方式突出的优点是没有电机直轴电枢反应,不会引起永磁体的去磁现象,且可以同时实现直线电机每安培最大推力控制,只要控制好定子电流的幅值和相位,就可以得到满意的推力控制特性。矢量控制原理框图如图1所示。

图1 永磁电机 id=0控制原理图
在图1所示的基于 PI调节器的 PMSM控制结构图中,id的参考电流为零,iq的参考电流经 PI调节器输出,控制器结构简单,但是 PI调节器的 Kp和Ki参数在系统设定时就固定了,在系统运行阶段不能修改,所以当负载转矩突变时,系统调节还是按照既定的控制率控制,无自适应能力。下面给出采用模糊控制器在线整定 PI调节器 Kp、Ki参数的控制方法。
2 模糊 PI控制器原理
模糊控制是基于“专家知识”、采用语言规则表示的一种人工智能控制策略。模糊控制主要是模拟人的思维、推理和判断的一种控制方法,它将人们的经验、常识等用自然语言的形式表达出来,建立一种适应于计算机输入输出的过程模型,是智能控制的一个重要研究领域。模糊控制器 (Fuzzy controller)是模糊控制系统的核心,其结构如图2所示。
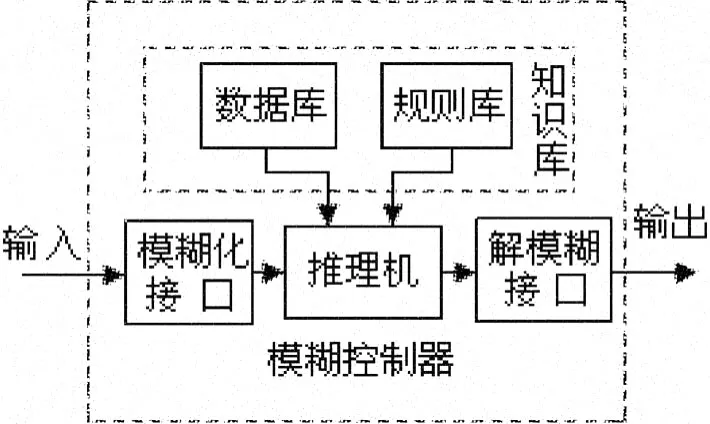
图2 模糊控制器组成
3 模糊 PI控制器实现
3.1 模糊 PI控制器的设计
根据工程实际要求,用于 PI参数调整的模糊控制器采用二输入二输出的形式,其结构如图3所示。该控制器是以误差 E和误差变化率 EC作为输入,PI控制器的两个参数的修正值 Kp、Ki作为输出。取输入 E和 EC,模糊子集为 {NB,NM,NS,ZO,PS,PM,PB},子集元素分别代表负大,负中,负小,零,正小,正中,正大。取输出 Kp、Ki,模糊子集为{K0(零 )、K1(很小 )、K2(小 )、K3(中小 )、K4(中 )、K5(中大 )、K6(大 )}。
参数自整定模糊 PI控制器就是找出在不同时刻 PI两个参数与 E和 EC之间的模糊关系,在运行中通过不断检测 E和 EC,根据模糊控制原理来对三个参数进行实时修改。由前人经验,可归纳出参数Kp、Ki的自整定规则[7-8]:①在系统运行初始阶段,|E|较大,为了加快系统响应速度,应取较大的 Kp。另外为防止积分饱和,避免系统响应出现较大的超调,此时应去掉积分作用,取 Ki=0;②在系统运行的中间阶段,即进入稳态期的前一阶段,|E|值中等大小,为了使系统响应的超调量减小和保证一定的响应速度,应取较小的 Kp,而 Ki大小要适中;③在系统即将进入稳态的阶段,|E|较小,为了使系统具有良好的稳态性能,应增大 Kp和 Ki的数值。
3.2 编辑隶属度函数
调节比例系数 Kp的模糊逻辑控制器 FLC(p),在偏差大时输出较大的比例系数,偏差适中时输出较小的比例系数,偏差较小时为了系统的稳定性要输出较大的比例系数;调节积分系数 Ki的模糊逻辑控制器 FLC(I),在偏差大时为了防止积分饱和输出的积分系数为 0,在偏差适中时输出适当的积分系数,在偏差较小时输出大的积分系数使系统尽快稳定。所以 E的论域在接近 0时分布要密一些。因此要达到更好的控制效果 E、EC的论域为不等距分布,比例和积分系数 Kp,Ki为论域等距分布。E、EC、Kp、Ki的论域如下:
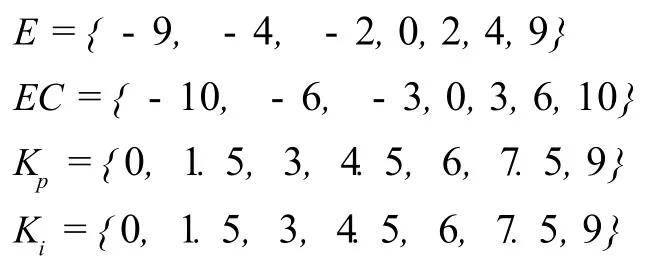
E、EC、Kp和 Ki的隶属度函数均采用三角型(Trimf)。在隶属度函数编辑器 (Mfedit)中输入所确定的论域。
3.3 编辑模糊控制规则
模糊控制查询表是模糊控制器的设计核心,根据电机控制经验 (参见 3.1)和大量的模拟仿真得到了模糊控制规则集,见表1和表2。
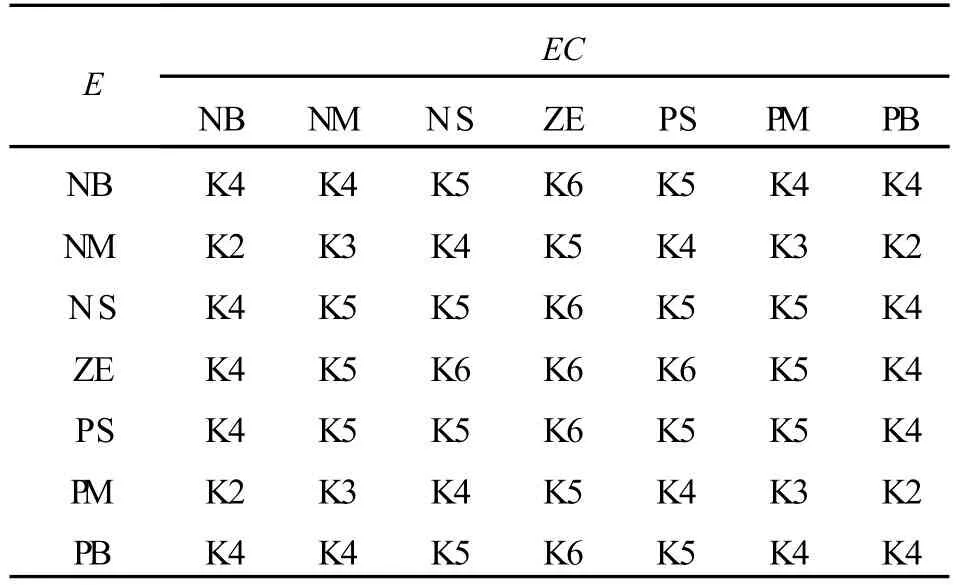
表1 Kp的控制规则表
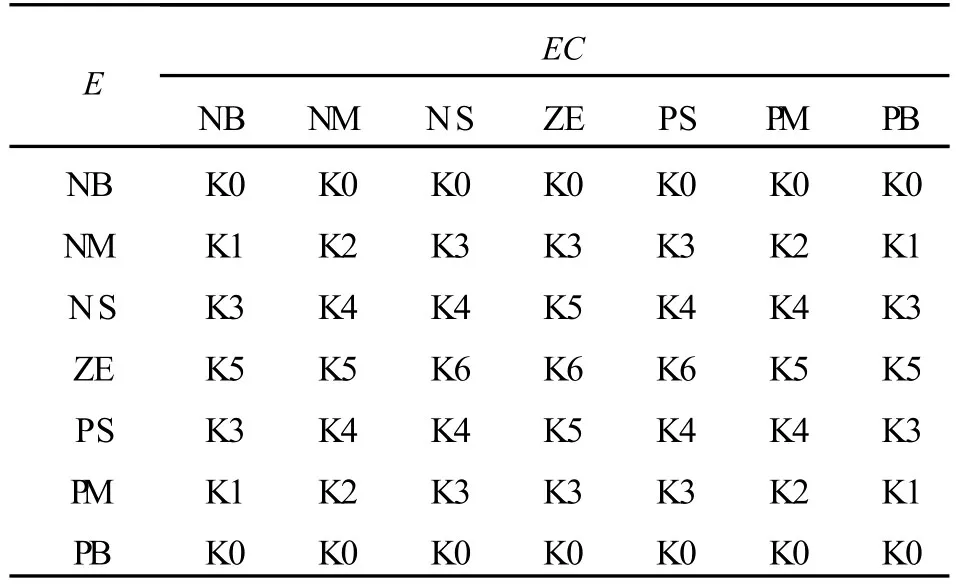
表2 Ki的控制规则表
根据控制规则表1和表2把模糊运算规则分别输入到调节 Kp和 Ki的模糊逻辑控制器 FLC(P)和FLC(C)的模糊规则编辑器中,这时在模糊规则观察器和曲面观察器中就可以看到对应的规则的变化规律,如图4和图5所示。

图4 FLC(p)模糊规则曲面观察器

图5 FLC(c)模糊规则曲面观察器
4 系统仿真
为验证本文的方法,采用 Simulink进行仿真研究。在 Simulink中按照图6和图7分别设计基于传统 PI控制器的控制系统和基于模糊 PI调节器的控制系统,电机参数如下:Rs=2.875Ω,Lq=Ld=8.5×10-3H,ψp=0.175 Wb,J=8 ×10-3kg·m2,p=4。仿真时间是 0.05 s,电机给定转速为 700 r/min,负载转矩初始为 3 N·m,0.03 s时突变为 7 N·m。

图6 基于传统 PI控制器的仿真
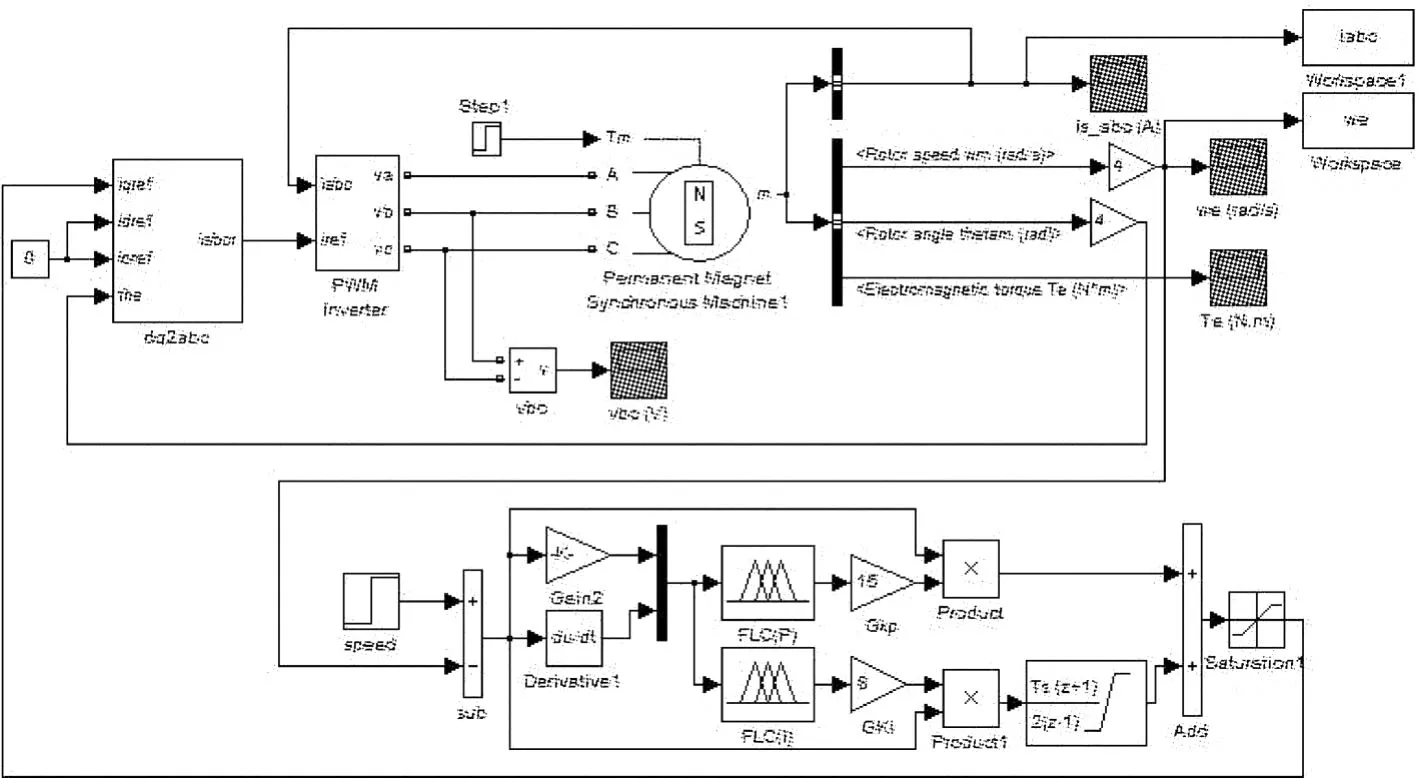
图7 基于模糊 PI调节器的仿真
5 仿真结果
采用 PI调节器和该文介绍的模糊 PI调节器仿真结果分别如图8和图9所示。
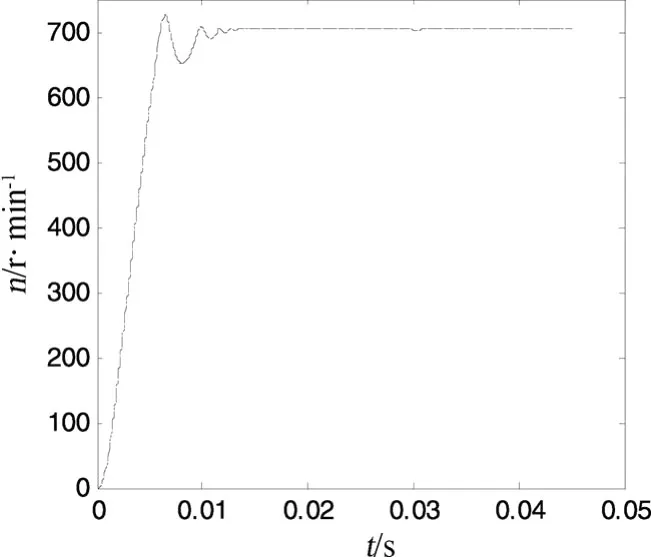
图8 id=0方式转速波形

图9 模糊 PI控制方式转速波形
从仿真结果可以看出,永磁电机在模糊 PI控制方式下速度超调量较小,调节时间较短,当出现负载扰动时,采用传统 PI调节器的 PMSM控制系统发生振荡,未能快速的稳定于 700 r/min,而采用模糊 PI调节器的 PMSM控制系统的动态速降较小,并能快速的稳定于 700 r/min。
以上仿真结果说明采用传统 PI调节器的PMSM控制系统在整个运行期间由于 PI参数固定,所以当参数变化或者负载有扰动时会导致性能下降;采用本文介绍的模糊 PI调节器的 PMSM控制系统利用模糊控制器在线实时整定 PI参数,所以当参数变化或者出现负载扰动时,能够调节 PI参数快速的跟踪系统输出,从而在整个系统具有更好的动态稳定性。
[1] HabroukM EI,Dar wishM K,Mehta p.Active Power Filters:a Review[J].IEE Proceedings of Electric PowerApplications,2000,147(5):403-413.
[2] 王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998.
[3] 姚建永,王碧芳.混合电力滤波器无差拍控制策略研究[J].电力自动化设备,2008,28(6):81-84.
[4] LuigiMalesani,Paolo Mattavelii.Robust Dead-Beat Current Control for PWM Rectifier and Active Filters[J].IEEE Trans Ind App1,1999,35(3):613-620.
[5] 徐万方,罗安,王丽娜,等.采用智能控制器的混合型有源电力滤波系统[J].电力系统自动化 ,2003,27(10):49-52.
[6] 邓礼宽.三相四线制下谐波和无功综合补偿的研究[D].北京:清华大学,2005.
[7] 章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,2004.
[8] 陈娅冰,周治平,纪志成.无刷直流电机模糊PI智能控制 [J].江南大学学报,2005,1(4):14-18.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
宇航计测技术(2018年3期)2018-09-08
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
汽车与新动力(2015年1期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28