
地上远程操控气压沉箱挖掘机的设计
2011-01-24 08:58杨继范
城市道桥与防洪 2011年8期
杨继范
(上海市第二市政工程有限公司,上海 200065)
0 前言
现代压气沉箱工法是在传统压气沉箱工法基础上,由日本的白石、大丰建设株式会社等几家公司经过几十年的持续研究、不断改良逐渐形成的,其关键施工设备系统主要包括地面送气系统、无人挖掘系统、排土系统和地面遥控监视系统。常见的无人挖掘系统有两种形式,一种是大气压环境下密封舱内远程操控沉箱挖掘机,另一种是地上远程操控沉箱挖掘机,本文将介绍适合于软土地层的地上远程操控气压沉箱挖掘机的国产化设计研制。
1 设计要求
1.1 有效作业半径
第一台标准型国产铲斗式气压沉箱挖掘机,是依据上海轨道交通工程项目中平面尺寸为15.60 m×25.24 m、深度为28.5 m的矩形竖井进行设计研制的,其有效作业半径为Φ4187 mm。两台可沿轨道移动、360°自由旋转的标准型铲斗式遥控压气沉箱挖掘机即可满足上述规格矩形竖井的沉箱施工。
1.2 最小外形尺寸
作为工作室设备安装和拆卸出入的唯一通道,材料闸的直径为Φ2000 mm,因此沉箱挖掘机设计应考虑部件或组件最小可拆卸的长度或宽度尺寸须满足小于2000 mm,确保其可自由地在材料闸内通行。
1.3 高度
气压工作室高度是指工作室顶板至沉箱刃脚下部之间的垂直距离。气压工作室高度越高,则其容积越大,气压控制的稳定性越高,压气沉箱施工的风险越小;气压工作室在沉箱下沉施工就位后,将填充素混凝土,其高度决定了素混凝土的充填量。因此,在保证沉箱施工稳定的前提下,气压工作室高度应尽可能小,根据压气沉箱挖掘机初步设计的要求,取气压工作室高度为2000 mm,沉箱挖掘机主臂放平状态下,其垂直高度(包括上部轨道)为 1700~1800 mm。
1.4 其他要求
研制的标准型铲斗式遥控压气沉箱挖掘机,还需满足地质、远程监控、可靠性、装运和外观等方面要求,例如:
(1)满足上海地区N值50以下的粘土、砂土等的土体开挖和排土要求。
(2)沉箱挖掘机设计应采用可靠的遥控操作,工作人员可通过观察不同方位的高清监视器,在地面控制室内通过操作手柄操控沉箱挖掘机的挖土和倒土的各项动作;为便于调试和维修,应采用可移动式遥控操作手柄。
(3)应考虑足够高的机械传动安全系数及电气防护等级、结构简单且可靠、维修方便,确保在潮湿的气压环境下工作正常;同时设备基本采用远程遥控操作,应有误操作保护设计,以防构件损坏。
(4)应满足市区、跨省市运输的要求,结构上可实现快速、简单装拆。
计算年回淤量时,模型通过计算一个全潮过程(小潮-大潮-小潮)的回淤量,再根据一年的全潮过程数得到一年的回淤量。
(5)外观应符合进口工程机械设备的涂装要求,耐腐防锈,色彩醒目、有较强立体视觉感,在气压工作室内工作可明显区别于周围环境。
2 总体设计
标准型铲斗式遥控沉箱挖掘机主要由两根平行轨道、行走装置、回转装置、主臂伸缩装置、主臂摆动装置、铲斗装置、设备平台等组成,同时还包含了无线遥控操作杆、电液动力系统、电气控制系统、油脂润滑系统、监控系统等。图1所示为沉箱工作室内专用沉箱挖掘机示意图。

图1 气压沉箱挖掘机总体示意图
2.1 平行轨道
行走轨道由1对工字梁组成,固定在工作室内顶板上,不仅承受挖掘机的整体自重和铲斗装土重量,而且在挖土作业时还承受一部分侧向的挖土分力。为提高轨道和滚轮之间的接触强度,在轨道内面增加了用螺栓固定的上、下道轨和侧道轨,材料为55号钢,表面淬火处理HRC50-55,深度2 mm。为提高下部挖掘机运行的稳定性,两根平行轨道的间距取1800 mm。为了保证现场安装精度和安装效率,平行轨道、上部连接板和中间连接钢板和行走链在工厂安装成一体;同时,每段平行轨道的长度取2000 mm,可以自由通过材料闸进入气压工作室。
2.2 行走装置
行走装置是带动下部挖掘机沿两条平行轨道水平移动的机构,由行走机架、行走挡轮、行走托轮、行走马达和驱动链轮组成,安装于平行轨道之间,下部装有带大齿轮的回转轴承,并与挖掘机回转机架相连接,如图2所示。
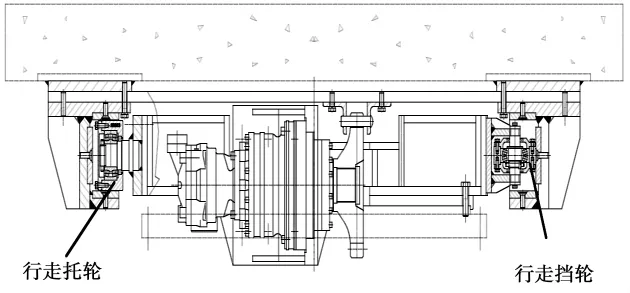
图2 行走装置示意图
行走机架采用刚性较大的箱型结构,4组行走挡轮和4组行走托轮分别安装于行走机架的两侧,两套行走马达及托架分别安装于行走机架的前后侧,驱动链轮与行走马达的输出轴相连,并于上部的行走链啮合。行走液压马达带液压制动装置,以防止挖土作业过程中,挖掘机主体结构承受的水平分力大于行走托轮和轨道间的滚动摩擦力时引起挖掘机移动,影响挖土作业正常进行。行走机架中部设置圆形通孔,安装电气系统的导电滑环和液压系统的中心回转接头,实现挖掘机可以实现360°全回转施工。
2.3 回转装置
回转装置由回转机架、回转轴承、驱动小齿轮、回转马达组成。回转轴承安装在上部,位于行走机架和回转机架之间,轴承带有内齿圈,与驱动小齿轮啮合传动;回转马达是带液压制动的液压马达。回转机架与下部主臂伸缩装置依靠销轴连接,上部的销轴通过连接摆动油缸的一端与主臂伸缩装置前端连接,下部的销轴直接与主臂伸缩装置中部连接。
2.4 主臂伸缩及摆动装置
主臂伸缩装置是沉箱挖掘机完成挖土、倒土等动作的主要部件,由导向箱主体、导向箱后箱体、伸缩活动臂、导向衬套、伸缩油缸和防尘密封等组成,如图3所示。
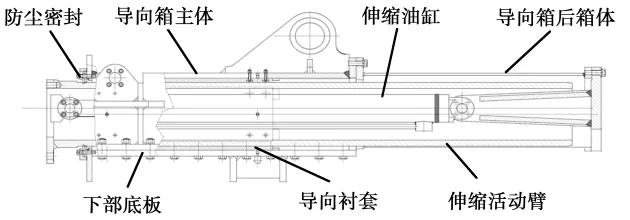
图3 主臂伸缩装置示意图
导向箱主体分上部箱体和下部底板两部分,采用螺栓连接后形成封闭箱体,分体式的设计对箱体内壁精加工、装配和维修十分有利。导向箱分主体和后箱体两部分,中间采用螺栓连接,分体式的设计符合现场施工条件,使进出材料闸的设备可分解的最小尺寸小于2000 mm。主臂摆动装置结构非常简单,由对称的2台摆动油缸,一端通过销轴与回转机架相连,另一端通过销轴与主臂伸缩装置的导向箱主体相连。
2.5 铲斗装置
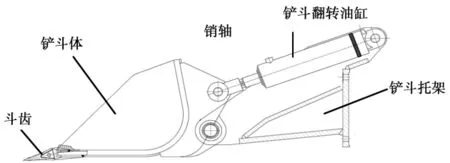
图4 铲斗装置示意图
上海地区软土具有粘度大的特点,相对于反铲铲斗,正铲铲斗在倒土时很难排尽斗内的土体,铲斗体设计成圆弧底,可以较好地解决这个问题,提高挖掘机挖土效率;另外,铲斗的翻转角度设置为向上+23°、向下-107°,向上的角度保证了挖掘时土体能有效地装满铲斗,向下的角度保证了倒土时土体可自由落入下面的装土桶。斗齿数量是4个,采用挖机标准齿形;铲斗托架后端与伸缩活动臂的前端用螺栓相连接。
2.6 设备平台
设备平台的主要功能是放置电气控制柜、油箱、动力装置、液压阀块等,同时操作人员也可坐在设备平台上直接操控沉箱挖掘机。设备平台左右各一,采用型钢和钢板焊接而成,用螺栓固定于回转机架上,为尽可能减低电机工作时产生的振动或噪音,设计时除考虑适当的强度外,主要在刚度方面有所提高。
2.7 无线遥控操作系统
无线发送装置采用 F24-60型遥控操作杆,包含了电源开关操作开关、电动机启闭开关、挖掘机水平前后移动、正反旋转、主臂伸缩和铲斗翻转的控制手柄,并可实现不同速度档控制。遥控操作杆采用干电池作电源,体积小巧,可随身携带,操作时可以放置在工作台上,也可用挂绳挂在身上。无线遥控的接收装置安装在挖掘机的电气柜侧,防水等级高,发送与接收的有效距离可达50 m以上。
在压气沉箱施工过程中,无线遥控发送装置在地面操作室内,接收装置在沉箱下部工作室内,中间采用信号线传递信号。无线遥控发送装置和接收装置采用一定的频率进行配对,可避免多台挖掘机同时施工时信号互相干扰。
2.8 液压动力系统
标准型压气沉箱挖掘机的所有动作均采用开式液压动力系统控制,液压动力来自安装在挖掘机上的一台高压比例控制柱塞泵,执行结构中挖掘机的移动和旋转采用液压马达,主臂和铲斗动作采用液压油缸。液压泵的排量由PLC程序模块控制,与无线遥控操作杆速度档操作相结合,实现挖掘机各种动作不同速度的灵活控制。液压马达主要用于挖掘机行走和回转系统,为提高挖掘机工作的锁定性,采用了带液压刹车装置的形式。所有的液压阀采用集成阀组的紧凑设计,使液压系统控制单元的阀件集成安装在一个阀块上,既减少了管路,又方便维修。
2.9 电气控制系统
电气控制系统主要由可编程控制器(PLC)、比例调节阀控制器、遥控接收器、控制变压器、直流电源、接触器、断路器、热继电器和端子等组成,PLC的编程按照上述的挖掘机的动作要求和遥控控制要求设定,是电气控制系统的关键。
动力电缆由地面连到工作室,由平行安装在行走轨道侧的电缆滑架引入挖掘机上部行走机构的中心孔内。与液压系统的中心回转接头的功能相类似,在行走机构的中心孔内装有电缆滑环,解决了上部电缆和下部电缆之间的相对旋转运动带来的问题。电缆滑环采用中空结构,液压软管可从其中心穿过;电缆滑环的上部装有防水板,可防止电缆滑环受潮而导致漏电故障的产生。
2.10 油脂润滑系统
油脂润滑系统主要为主轴承、连杆机构的销轴、主臂伸缩导向提供油脂润滑,油脂采用1号锂基脂,由一台油脂泵压送油脂,通过分路阀将油脂压注到不同的润滑点。
2.11 监控系统
监控系统分地面和工作室两部分组成。工作室内装有几个台清晰度较高、可远程调整角度和焦距的摄像头,并配以照明,从不同角度摄取挖掘机在压气沉箱的运行情况;地面操作室的几台监视器,可实时监控、切换工作室内挖掘机的作业画面,是沉箱挖掘机地面遥控操作人员实时操作挖掘机各种动作的主要依据。
3 结语
首台工厂研制地上远程操控气压沉箱挖掘机,在模拟压气沉箱工法工况条件的情况下,成功进行了挖土试验。从试验情况分析,挖掘机的动作及幅度设计,不存在任何的挖土死角,可以满足气压沉箱施工的要求;挖机实现360°全位置回转,施工效率和可靠性较高;圆弧形底的正铲斗设计,对于粘度较高的上海软土地层,挖土和倒土效率较高;伸缩装置中的导向衬套、自动油脂润滑系统和局部材料的抗磨设计,提高了设备的整体使用寿命。
对于较大尺寸的沉箱施工,在要求提高施工进度的情况下,需要几台挖掘机在工作室内同时挖土作业。因此,在实际应用时,还需利用传感技术,开发出挖掘机位置的自动实时测定功能,通过PLC程序的设定,自动形成设备之间的安全距离和动作保护,避免人工操作不当而产生的互相干扰或设备碰撞。
[1]彭芳乐,孙德新,大内正敏,白云.超大深度压气沉箱工法的施工技术[J].地下空间,2004,24(z1):699-703.
[2]郭建刚,彭芳乐.现代压气沉箱工法应用于盾构隧道工作井的若干问题探讨[A].中国土木工程学会第十二届年会暨隧道及地下工程分会第十四届年会论文集[C].2006.
猜你喜欢
科学养鱼(2023年1期)2023-02-10
百科探秘·航空航天(2021年4期)2021-05-06
家教世界·创新阅读(2021年1期)2021-03-11
家教世界(2021年1期)2021-03-01
汽车实用技术(2020年12期)2020-10-21
油气田地面工程(2020年8期)2020-08-15
工程设计学报(2020年2期)2020-05-25
家教世界·创新阅读(2020年12期)2020-01-11
汽车实用技术(2019年16期)2019-09-11
中国房地产业(2016年22期)2017-01-19