
利用D ISLab进行弹簧振子简谐运动实验条件的研究
2011-01-26 05:50朱国斌袁海泉陈梦姣
物理实验 2011年6期
朱国斌,袁海泉,陈梦姣
(苏州大学物理科学与技术学院,江苏苏州215006)
1 引 言
在利用朗威数字化信息系统实验室(D ISLab)研究弹簧振子简谐运动的实验中,使用D ISLab力和位移传感器,可以即时测量出弹簧振子振动过程中受到的回复力 F和离开平衡位置的位移x,再通过D ISLab的数据处理描绘出弹簧振子的 F-t图像和x-t图像,这样可以直观地显示出力和位移随时间变化的关系.笔者将2个曲线进行比较,发现它们的相位差与理论值不符,弹簧的回复力存在滞后现象,出现这种现象的原因是什么?影响回复力的滞后的因素又有哪些?本文设计了系列实验,试图回答这两个问题.
2 弹簧振子的回复力滞后现象
实验所需仪器为:D ISLab、铁架台、弹簧、计算机.
实验原理图如图1所示,固定力传感器时,使挂钩的方向竖直向下,将弹簧和位移传感器的发射端挂在力传感器下方,保证位移传感器的发射端静止,然后调零,沿竖直方向拉伸振子.在D ISLab教材通用软件上,选择组合图线模式,分别添加“F-t”图像和“x-t”图像,采用示波方式同步显示数据,实时描绘 F-t图像和 x-t图像,实验结果如图2所示.
理论上,力和位移之间的相位差是π,而图2中的曲线表明,力和位移之间的相位差并不是π,为了探究产生这种差异的原因,设计了以下实验加以验证.

图1 实验示意图

图2 F-t,x-t图像
在相同的实验条件下,打开D ISLab的组合图线模式,添加“F-x”图像,重复实验,实验图像见图3.
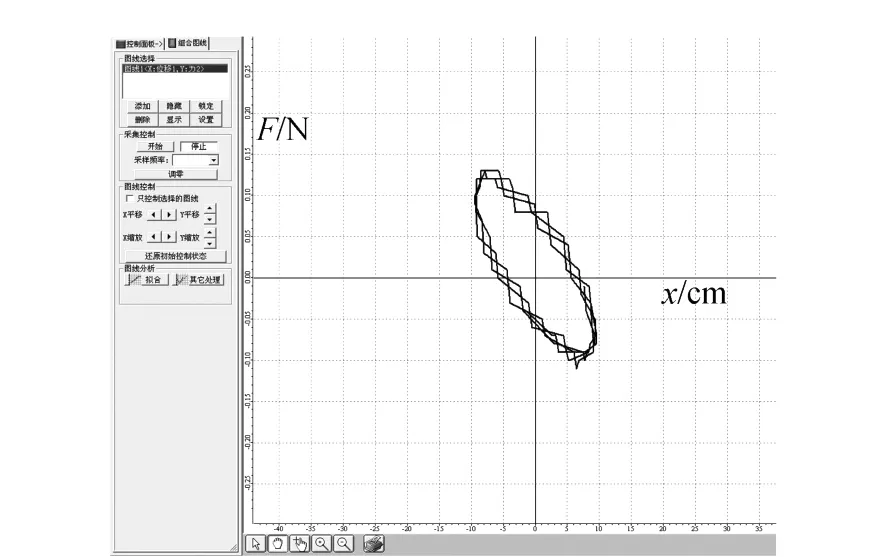
图3 F-x图像
由图3可知,在弹簧振动过程中,F-x图像并不是过原点的直线,而近似为椭圆,在位移为零处,回复力并不为零.可见,弹簧振子在振动过程中,并不严格满足胡克定律,存在着回复力的滞后现象.这与文献[1]描述的现象相类似,但振动过程中的滞后现象对学生理解简谐运动中的相位问题影响更大.
3 实验研究回复力滞后的影响因素
弹簧振子在振动过程中,回复力存在滞后现象,影响回复力滞后的因素可能包括弹簧的劲度系数、简谐运动的振幅、弹簧振子的质量.下面对这3个因素进行研究.
实验所需仪器:DSLab、铁架台、不同劲度系数的弹簧3根、钩码、计算机.
3.1 实验方法
劲度系数的测量方法:实验原理图如图1所示,将弹簧挂在力的传感器下,弹簧下端悬挂位移传感器的发射端,打开D ISLab系统,控制位移传感器静止并调零.在组合图线模式下,添加 F-x图像,并开始记录.用手缓慢拉伸位移传感器,速度尽可能慢,待拉到合适长度,再缓慢减小力,使弹簧收缩.得到一组数据点,利用拟合中的一次函数拟合数据点,得出一次函数 y=ax+b,由于图像横、纵坐标的单位分别是cm和N,所以该弹簧的劲度系数k=100a.用该方法测得3根弹簧的劲度系数分别为0.94,2.07,3.72 N/m,编号分别为1,2,3.
实验方法:保证振子质量相等,保持振子的振幅不变,选用3根不同劲度系数的弹簧进行实验,研究弹簧劲度系数对回复力滞后的影响.选用其中一根弹簧,不改变振子的质量,研究振幅对弹簧回复力滞后的影响;选用其中一根弹簧,保持振子的振幅相同,研究振子质量对弹簧回复力滞后的影响.
数据读取与处理的方法:把实验所得图像沿x和y轴方向拉伸放大,如图4所示,利用D ISLab的鼠标显示坐标值功能,选取7个完整的波形,分别读出 F-t,x-t图像中与t轴的交点处的时间,记录14个回复力为0和位移为0的时刻.用相邻的位移与回复力为0时刻之差表示该点的相位差,求其平均得到时间¯t,该时间即为回复力相对于位移滞后的平均时间;利用逐差法计算出简谐运动的周期 T;用η=(¯t/T)100%表示弹簧回复力相对于位移的滞后百分比.

图4 数据的读取
3.2 实验结果
分别用弹簧1,2,3进行弹簧振子简谐运动的实验,用位移传感器的发射端(质量为81 g)做振子,控制振幅为5 cm进行实验,实验处理结果如表1所示.

表1 不同弹簧的回复力滞后百分比
由表1可以看出,在振幅一定的情况下,随着弹簧劲度系数的增大,回复力滞后的百分比明显增大.所以在进行弹簧振子简谐运动的实验中,尽可能选择劲度系数小的弹簧,如果实验室中没有劲度系数小的弹簧,可以通过把2根弹簧串联的方式来减小劲度系数,从而减小回复力的滞后程度.
选用劲度系数最小的弹簧1,因为振子的质量为81 g,振子平衡时弹簧伸长约为9 cm,弹簧的弹性限度为17 cm左右,所以弹簧的振幅最好选择在7 cm以内.在此条件下进行实验,探究振幅对弹簧回复力滞后的影响,实验处理结果如表2所示.

表2 不同振幅的回复力滞后百分比
从表2可以看出,对于同一根弹簧,随着振幅的增大,回复力滞后百分比明显减小.所以在进行弹簧振子简谐运动的实验中,尽可能增大简谐运动的振幅.但需要注意的是,振幅的增加必须保证在弹簧弹性限度内,否则随着振幅的增加,弹簧劲度系数也增大,滞后百分比反而会增大.
弹簧1的劲度系数较小,增加振子质量,会超出其弹性限度,所以使用弹簧2探究弹簧振子的质量对弹簧回复力滞后的影响.D ISLab的位移传感器发射端的质量为81 g,分别将10 g和20 g的钩码挂在位移传感器下端,控制振幅为5 cm进行实验,实验处理结果如表3所示.

表3 不同振子质量的回复力滞后百分比
由表3可以发现,对于同一根弹簧,在振幅一定的情况下,随着振子的质量的增大,回复力滞后的百分比明显减小,所以在进行弹簧振子简谐运动的实验中,在弹簧弹性限度内,尽量增加振子的质量,减小弹簧回复力滞后的程度.
4 结束语
综上所述,在D ISLab平台上,弹簧振子简谐运动过程,回复力存在滞后现象.教师利用弹簧振子研究力和位移随时间的变化关系时,应尽可能选择弹性系数小的弹簧和质量大的振子,在弹性限度内,控制振幅尽可能大,使回复力的滞后程度减小,方可获得满意的实验结果.
[1] 李渝翔,刘艳春.用D IS进行橡皮筋滞后现象的实验研究[J].物理教学探讨,2006,24(7):58-59.
[2] 呼格吉乐.改进D IS实验系统中的“弹簧振子的振动图像”实验[J].物理实验,2010,30(5):22-23,26.
[3] 陈明华.利用传感器探究弹簧振子的运动[J].中国电化教育,2007(4):72-74.
[4] 张溶菁.中学物理数字化实验研究[M].上海:上海教育出版社,2009:67-68.
猜你喜欢
学校教育研究(2018年4期)2018-10-21
电子制作(2017年20期)2017-04-26
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
电测与仪表(2016年18期)2016-04-11
股市动态分析(2015年29期)2015-09-10
海外星云 (2013年3期)2013-02-20
物理通报(2013年11期)2013-01-12
