仿牛鼻鲼机器鱼胸鳍的时间非对称摆动研究
2011-01-29 08:46杨少波韩小云谢海斌
中国机械工程 2011年5期
杨少波 韩小云 邱 静 谢海斌
国防科学技术大学,长沙,410073
仿牛鼻鲼机器鱼胸鳍的时间非对称摆动研究
杨少波 韩小云 邱 静 谢海斌
国防科学技术大学,长沙,410073
针对以胸鳍升力模式推进的牛鼻鲼在胸鳍扇动时存在时间上的非对称摆动问题,分析了牛鼻鲼这一泳动特征的力学含义,并通过仿牛鼻鲼机器鱼开展了时间非对称摆动的研究。首先建立了时间非对称摆动的数学模型;然后在一系列的不对称系数下进行了机器鱼的泳动实验,发现存在一个不对称系数的较佳范围,并且当不对称系数为0.56时,机器鱼的泳动速度最大;最后通过机器鱼的水动力实验研究,讨论了不对称系数对水动力的影响规律。结果表明,牛鼻鲼在实际游动过程中通过上挥急回的方式拍动,特别是经常以不对称系数0.56工况方式扇动,可以获得更好的推进性能。
胸鳍升力模式;牛鼻鲼;机器鱼;时间非对称摆动;水动力
0 引言
由于海洋资源的开发和海洋探索的需要,胸鳍模式水下推进目前正成为国内外研究的热点[1-5]。牛鼻鲼的胸鳍向两侧伸展呈三角形,鳍身融合。它们的游泳方式非常优雅,而又不失敏捷,仅仅通过一对宽大胸鳍的上下扑动就产生必需的推力和升力,属于典型的胸鳍升力模式推进[6]。牛鼻鲼胸鳍升力模式相比于其他推进模式,具有摆动频率低、负重空间大、升力大、机动性能优良等优点。
Heine[7]对牛鼻鲼进行过详细的运动观测,并记录了牛鼻鲼鳍尖的速度和位置,他指出:相对胸鳍水平位置,上挥行程末位置的幅度要比下拍行程末位置的幅度大很多,即胸鳍上下扇动幅值不对称(我们称这种不对称摆动为胸鳍的空间非对称摆动);另外,鳍尖的扇动变化并不是典型的正弦波动,表现在上挥行程的时间和下拍行程的时间并不对称,牛鼻鲼上挥行程时间约为下拍行程的一半(我们称这种不对称摆动为胸鳍的时间非对称摆动)。
关于胸鳍的空间非对称摆动,Rosenberger[8]曾通过研究鲼目鱼的运动方式与生存适应性的关系指出,牛鼻鲼之所以采取这种不对称扇动方式,是因为牛鼻鲼的眼睛长在吻部上端两侧的位置,向下扇动幅值较大时会影响到其对海底面的视野观察范围,进而影响觅食;而对于其他以胸鳍升力模式推进的鳐鲼和蝠鲼,它们游动时不存在这种空间非对称摆动。因此,本文认为这种空间非对称摆动不属于胸鳍升力模式推进的典型特征,只属于牛鼻鲼为适应生存而显现的个别特征。
Hu[9]尝试通过数值研究的手段讨论了二维翼型的时间非对称摆动的性能,特别对俯仰、浮沉和偏航的非对称摆动进行了讨论,指出了非对称的摆动运动能给机动运动产生较大的推力和升力。
据研究[7-8,10],牛鼻鲼的前进速度和胸鳍摆动参数具有以下的关系:要提高牛鼻鲼的前进速度,一方面可通过增加最大摆幅;另一方面可通过增加鳍尖的最大速度。鳍尖的速度增加可通过提高肌肉力的形式来实现,但或许这并不是一种高效的游动方式。我们注意到,通常情况下,牛鼻鲼游动时上挥行程要快些,而下拍行程要慢些,或许这种时间非对称的摆动就是一种高效的游动方式。
牛鼻鲼在胸鳍的每个拍打周期中,推力都有两次波峰[7,11],而且上挥行程的波峰值要高一些,即使是上下对称拍打时也是如此。可以推理,上挥行程时间变短时,鳍尖的上挥速度进一步增大,推力应该进一步增大。因此,牛鼻鲼胸鳍的这种时间非对称游动将进一步加大两个推力峰值的不对等程度,从而影响做功的多少。
1 实验装置及原理
本课题组研制的仿牛鼻鲼机器鱼的设计结构和“Cownose-Ⅱ”机器鱼的实物模型见图1[12]和图2。整个机器鱼弦长 300mm,最大展宽500mm,总质量为1kg。机器鱼的胸鳍由1mm厚的硅橡胶制成,通过前后间隔均匀排列的鳍条按照一定相序摆动来模仿牛鼻鲼胸鳍的扇动。

图1 机器鱼结构设计

图2 “Cownose-Ⅱ”机器鱼实物模型
本文采用小载荷盒式气动力天平测量机器鱼的水动力。气动力天平是一种专用于测量作用在风洞模型上的空气动力的测量装置,由于模型上空气动力的方向是变化的,因此,气动力天平必须先将作用于模型上的空气动力按一定的直角坐标轴系分解成几个分量,然后分别加以测量[13],整个测量装置见图3。
小载荷盒式天平属于应变式六分量天平。盒式天平分为浮动框和固定框两部分。浮动框与机器鱼相连接,固定框与双支杆式的支撑系统相连接。固定框上有8个悬臂式的应变梁,其表面上贴有应变片,可测6个水动力(矩)分量。浮动框与固定框之间用8根连杆相连。连杆的两端有双向弹性铰链,使连杆只传递拉(压)力,悬臂式应变梁只受到所测水动力分量的作用。应变梁1、2、3和4承受Fy、Mz和M x的作用,应变梁5和6承受Fz和M y的作用,而应变梁7和8承受Fx的作用。通过测量各电路分量,可得到八通道电压信号,将八通道电压信号代入转换公式,通过迭代计算便求得六分量水动力。
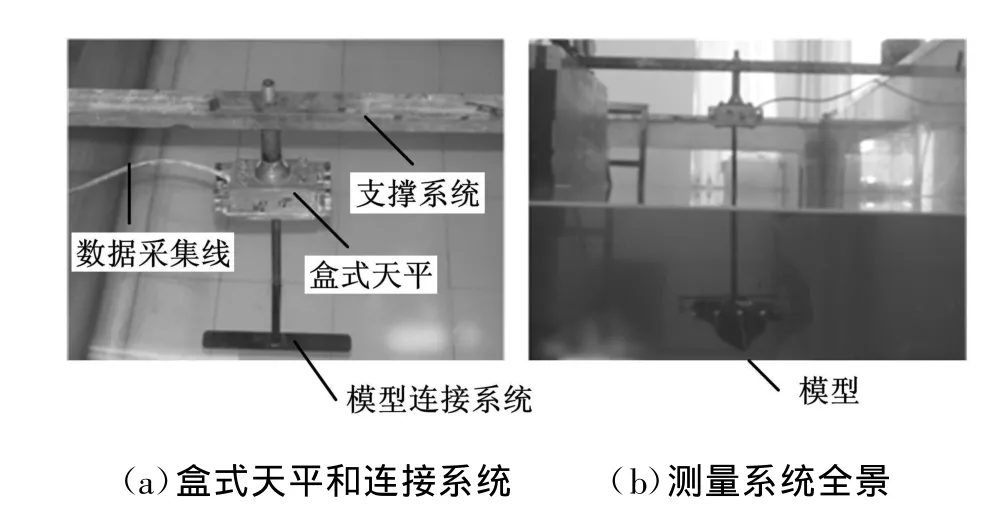
图3 水动力测量装置图
2 数学模型
类比曲轴运动机构的急回转运动,本文对胸鳍的时间非对称摆动进行描述,并令鳍条的时间非对称摆动方程为

其中,ω为频率;φ为相邻鳍条的相位差;P定义为急回系数,反映上挥行程的时间和下拍行程的缓急。当P越大,上升行程越缓慢;而当P越接近1,上升行程越急促。若令频率f=1Hz,相邻鳍条的相位差φ=0,则系数 P对摆动波形的影响见图4。
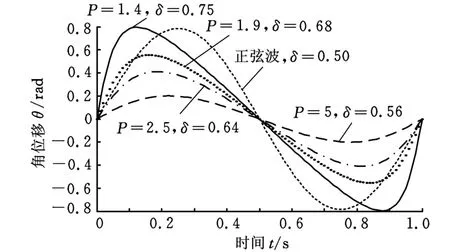
图4 系数P对摆动波形的影响
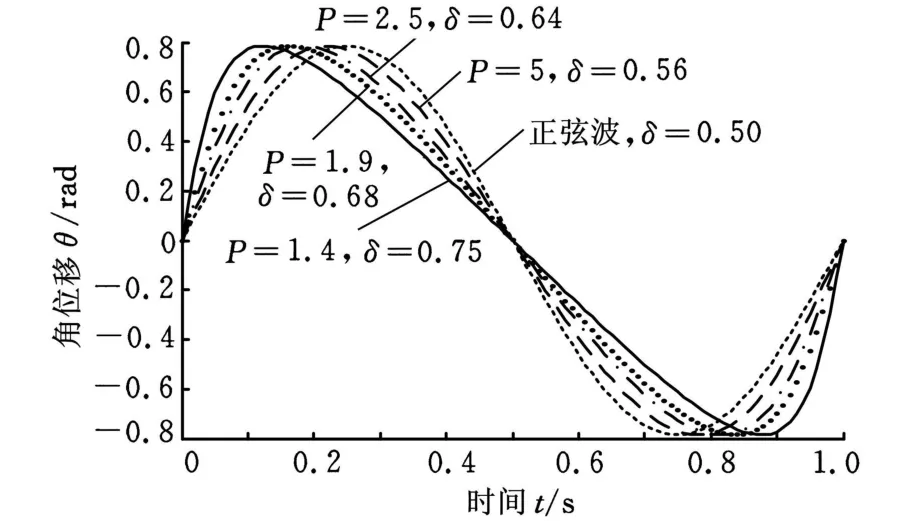
图5 幅度增益对波形的补偿
牛鼻鲼实际游动时的不对称系数基本在0.50~0.67范围内。本文为讨论不对称系数对机器鱼游动速度和水动力的影响,给出了时间非对称摆动时的几种工况。此时,相对不对称系数0.75、0.68、0.64和0.56,分别对应的幅度增益为0.9875、1.4171、1.9094和 3.9008。
3 游动实验及分析
实验水池的长×宽×高分别为4m×1.8m×1.5m,水流速度静止,水深0.8 m。水池长度方向上贴有刻度纸,用来计量机器鱼的游动位置。实验中,使用200万像素DCR-TRV 60E Sony摄像机对机器鱼的运动进行每秒24帧拍摄,通过帧处理得出机器鱼的运动数据。图6所示为机器鱼在频率1Hz,最大摆幅45°,相邻鳍条相位差48°工况下,不对称系数为0.5时的直线游动序列。

图6 机器鱼直线游动序列
在这几种时间非对称摆动的工况下,对机器鱼进行游动实验,获得了前进速度与不对称系数的关系(图7),其中,圆点所示为实测值,BL表示身长,是相对模型长度的量。由图7可见,胸鳍的时间非对称摆动存在一个较优范围,即在不对称系数约为0.50~0.72的范围,胸鳍的摆动都可以获得较大的速度。其中,在不对称系数0.56附近取得最大值。这能够初步解释牛鼻鲼游动的时候为何总喜欢采用上挥急回的方式拍动。

图7 前进速度随不对称系数的变化
4 水动力实验及分析
利用水动力测量装置测量柔性鳍条机器鱼模型的水动力。当机器鱼从静止启动到周期稳定摆动,分别得到对称时的水动力结果(图8)以及不对称系数为0.75、0.68和0.56的水动力结果(图9、图 10和图 11)。

图8 柔性鳍条对称运动水动力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.50)
当鳍条对称摆动时,也即不对称系数为0.50时,通过计算得到,推力平均值约为10.849N,升力平均值约为1.2384N,仅有推力平均值的十分之一;侧向力平均值为6.7612N,表明机器鱼模型有较大的偏移趋势;俯仰力矩却变小,平均值约为-0.4253N◦m,说明机器鱼模型游动时俯仰角变小,游得更加平稳。
在不对称系数为0.75时,测量的推力平均值约为10.38N,相比对称摆动的推力略有减小,推进性能略有下降;升力平均值约为3.3794N;侧向力为-0.9168N,表明左右胸鳍产生的侧向力基本对称;而俯仰力矩为-0.5787N◦m,表明模型游动更平稳。

图9 柔性鳍条不对称运动水动力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.75)
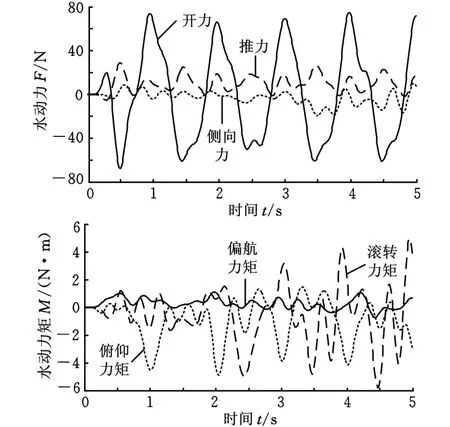
图10 柔性鳍条不对称运动水动力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.68)

图11 柔性鳍条不对称运动水动力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.56)
在不对称系数为0.68时,测量的推力平均值约为11.886N,相比对称摆动的推力增大9.5%;升力平均值约为 4.4314N;侧向力平均值约为-3.3448N,表明左右胸鳍产生的侧向力不对称;而俯仰力矩约为-0.1641N◦m,模型游动时的俯仰角变得更小,游动更趋平稳。
在不对称系数为0.56时,测量其推力平均值约为12.189N,相比对称摆动的推力增大12%;升力平均值约为-5.2363N;侧向力平均值约为0.2306N,左右胸鳍产生的侧向力又基本对称;而俯仰力矩约为0.7496N◦m,仍然保持较好的游动平稳性能。
可见,对应着不同的不对称系数,模型测量得到的推力性能变化规律与随速度的变化规律一致,说明牛鼻鲼胸鳍升力模式在游动时确实存在着时间非对称较佳范围和最佳不对称系数。
同时,在时间非对称摆动工况下,机器鱼在较佳范围内的推进性能不仅得到增强,而且左右胸鳍的侧向力对称性能也变好,同时由于俯仰角变化较小,模型的游动也更趋于平稳。
5 结束语
利用机器鱼模型对胸鳍的时间非对称摆动进行研究,从模型的游动实验和水动力实验结果可以分析出,采用胸鳍升力模式推进的鱼类在游动时,存在一个不对称系数的较佳范围,并且具有最佳的不对称系数。
在时间非对称摆动工况下,机器鱼在较佳范围内的推进性能不仅得到增强,而且左右胸鳍的侧向力对称性能也变好,同时由于俯仰角变化较小,模型的游动也更趋于平稳。由此可以解释,牛鼻鲼在实际游动过程中通过这种上挥急回的方式拍动,特别是经常以不对称系数0.56工况方式扇动,获得了更好的推进性能,实现了高效地游动。
[1] Blake R W.Influence of Pectoral Fin Shape on Thrust and Drag in Labriform Locomotion[J].J.Zoo l.Lond.,1981,194:53-66.
[2] Westneat M W,Walker JA.Applied Aspects of MechanicalDesign,Behavior,and Performanceof Pectoral Fin Swimm ing in Fishes[C]//Proc.Special Session on Bio-Engineering Research Related to Autonomous Underwater Vehicles,10th Int.Symp.Unmanned Untethered Submersible Technology.Durham,NH,1997:153-165.
[3] H ewish M.Submarines to Cast off Their Shackles,Take on New Roles[J].Jane's Internationa l Defense Review,2002,3:35-43.
[4] H ishinuma K,Konno A,Mizuno A,et al.Analysis Method o f Flapping Fin Motion for Manta-like Underwater Robot[C]//Proceedings of 7th International Symposium on Marine Engineering.Tokyo,2005:180.
[5] Xu Y C,Zong G H,Bi S S,et al.Initial Development of a Flapping Propelled Unmanned Underwater Vehicle[C]//Proceedings of the IEEE Interntional Conference on Robotics and Biomimetics.Piscataway,2007:524-529.
[6] SfakiotakisM,Lane D M,Davies JBC.Review of Fish Sw imm ing Modes for Aquatic Locomotion[J].IEEE J.Oceanic Eng.,1999,24(2):237-252.
[7] H eine C E.Mechanics of Flapping Fin Locomotion in the Cow nose Ray,Rhinop tera Bonasus(Elasmobranchii:Myliobatidae)[D].North Carolina:Duke University,1992.
[8] Rosenberger L J.Pectoral Fin Locomotion in Batoid Fishes:Undulation Versus Oscillation[J].Journal of Experimental Bio logy,2001,204(2):379-394.
[9] H uW R.Performance of an Asymmetric Oscillating Foil[C]//The Fourth International Symposium on Aero Aqua Bio-mechanisms.Shanghai,2009:1-5.
[10] Yang Shaobo,Qiu Jing,Han Xiaoyun.K inematics Modeling and Experiment of Pectoral Oscillation Propu lsion Robot Fish[J].Journal of Bionic Engineering,2009,6(2):174-179.
[11] Clark R P,Smits A J.Thrust Production and Wake Structure of a Batoid-inspired Oscillating Fin[J].J.Fluid Mech.,2006,562:415-429.
[12] 杨少波,韩小云,张代兵,等.一种新型的胸鳍摆动模式推进机器鱼设计与实现[J].机器人,2008,30(6):508-515.
[13] 王铁城.空气动力学实验技术[M].北京:航空工业出版社,1995.
Research on Pectoral FinsOscillating Asymmetrically in Time of a Cownose-like Robotic Fish
Yang Shaobo Han Xiaoyun Qiu Jing Xie Haibin
National University of Defense Technology,Changsha,410073
Before the asymmetricaloscillation in time of Cownose-like robotic fish was discussed,the mechanic hint behind the sw imming behaviorwasanalysed.Firstly,amathematicmodelof the fin rays oscillating asymmetrically in tim ewas set up;secondly,the sw imming experimentsof the robotic fish with a series of asymm etric coefficients werem ade,and the results show that it exits a better range of asymm etric coefficients,and while asymmetric coefficients is 0.56,the robotic fish attains the best forw ard velocity.Finally,the hydrodynam ic force of the robotic fish w ith these asymmetric coefficientswas tested,and the relations among each other were discussed.These results w ill reveal that the attention of the swimm ing behavior of Cownose ray may improve the propulsive,especially in the case of oscillating with the 0.56 of asymmetric coefficient.
lift-based mode of pectoral oscillation;cownose ray;robotic fish;oscillating asymm etrically in time;hyd rodynamic force
TP24
1004—132X(2011)05—0588—04
2010—02—23
国家自然科学基金资助项目(50405006);国防科学技术大学博士研究生创新基金资助项目(B060302)
(编辑 袁兴玲)
杨少波,男,1975年生。国防科学技术大学机电工程与自动化学院博士研究生。主要研究方向为海洋仿生工程。发表论文10余篇。韩小云,男,1971年生。国防科学技术大学机电工程与自动化学院副教授。邱 静,男,1964年生。国防科学技术大学机电工程与自动化学院教授、博士研究生导师。谢海斌,男,1977年生。国防科学技术大学机电工程与自动化学院讲师、博士。
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
海洋工程(2020年1期)2020-04-10
小学科学(2020年11期)2020-03-04
太原科技大学学报(2019年3期)2019-08-05
航天电子对抗(2019年4期)2019-06-02
养生保健指南(2017年8期)2017-12-09
科学Fans(2017年3期)2017-04-13
小学阅读指南·低年级版(2015年6期)2015-06-16
天津诗人(2014年4期)2014-11-14
筑路机械与施工机械化(2014年2期)2014-03-01