
基于滑模变结构及模糊控制的异步电机调速系统的研究*
2011-02-05 05:36叶汉民
组合机床与自动化加工技术 2011年6期
叶汉民,朱 伟
(桂林理工大学 a.信息科学与工程学院;b.机械与控制工程学院,桂林 541004)
基于滑模变结构及模糊控制的异步电机调速系统的研究*
叶汉民a,朱 伟b
(桂林理工大学 a.信息科学与工程学院;b.机械与控制工程学院,桂林 541004)
针对异步电机传统的直接转矩控制系统转矩脉动大,因电机参数变化和负载波动等因素使调速性能变差的问题,提出了用滑模变结构速度调节器代替传统的PI调节器,并利用模糊控制方法改进逆变器矢量电压选择表,以达到更好调速的目的。在MATLAB/Simulink中建立了系统的仿真模型。仿真结果说明该系统能够提高转速的响应速度,减小转矩脉动,同时还具有较好的动静态稳定性和鲁棒性。
滑模变结构;模糊控制;稳定性;鲁棒性
TP273
A
0 引言
异步电机是一个多变量、非线性、时变、强耦合的被控对象,其模型非常复杂。传统的直接转矩控制变频调速技术是把异步电机与逆变器看作一个整体,采用电压空间矢量分析方法在定子坐标系进行磁通、转矩计算,通过磁通跟踪得出PWM逆变器的开关状态切换的依据从而直接控制转矩。尽管直接转矩控制具有结构简单、转矩响应快、对转子参数变化不敏感以及对参数鲁棒性好等优点。然而,传统的直接转矩控制存在着低速性能差、电流和转矩脉动大、开关频率不固定的问题[1]。
滑模变结构控制对系统参数的变化和外界干扰的影响不敏感,能使系统的状态按预定的路径变化,使控制系统具有高稳定性、高精度、鲁棒性和快速响应等优点[8]。基于此,提出根据滑模变结构控制理论设计和实现的速度调节器来代替PI调节器,保证了调速系统的鲁棒性和快速性[10]。同时用模糊逻辑控制器来代替传统DTC中的转矩和磁链滞环控制器,优化开关表,以实现对转矩的实时控制,从而进一步改善感应电动机直接转矩控制系统的动态和稳态特性,减小转矩脉动[6]。
1 直接转矩的基本原理
直接转矩控制系统中,通过速度辨识器获得转速ωr,然后与给定转速ωr*比较,通过速度调节器得到转矩给定值Te*。将检测得到的电机定子电流Us和电压Is输入磁链转矩估算器得到转矩实际值Te和定子磁链的幅值Ψ及磁链角θ。磁链调节器与转矩调节器分别利用磁链与转矩的偏差得到磁链信号Ψq和转矩信号Tq。电压矢量选择单元综合Ψq、Tq和θ,通过查表的方式得到逆变器开关信号Sabc,控制逆变器提供相应的电压驱动异步电机运行,如图1[2-3]所示。

图1 DTC系统框图
2 模糊逻辑控制器的设计
传统的直接转矩控制采用滞环比较控制器,依据转矩误差、定子磁链幅值误差来选择逆变器的开关状态,无法区分定子磁链误差、转矩误差的等级,对于一些不确定的因素引起的误差微小变化,不能及时控制。而模糊控制,善于处理存在不精确性和不确定信息的控制问题。加之,在直接转矩控制中,磁链偏差、转矩偏差和磁链角均用一定范围的值来表示,而这个范围本身就是一个模糊的语言变量。因此,采用模糊控制的方法来求取逆变器的开关状态,改善了感应电动机直接转矩控制系统的动态和稳态特性,减小转矩脉动,而且更符合控制规律[5]。
2.1 模糊子集的选取[5]
基于上面的分析可知,直接转矩的模糊控制是在直接转矩的基础上用一个模糊逻辑控制器代替了转矩和定子磁链滞环控制器。该模糊逻辑控制器有3个模糊输入变量和1个输出控制量。如图2所示。

图2 模糊逻辑控制器


即 θ的论域为{θ1,θ2,θ3…θ12},其隶属度函数如图3c所示。

图3 模糊控制器的三个输入隶属度函数
该模糊控制器的输出控制量为逆变器的开关状态。它其实是电压型PWM逆变器的3个开关Sa、Sb、Sc的组合,共有8种开关状态。即它是一个离散清晰的数字量输出,可用独点模糊集表示,其论域n为{0,1,2,3,4,5,6}。当 n=0 时,根据逆变器开关频率最小的原则来选择零矢量。
2.2 模糊控制规则的建立[6]
该模糊控制器的控制规则可由ET,Eψ,θ和n描述,共180条规则,如表1所示。

表1 模糊规则表
其中第i条规则表示为:Ri:if Eψis Ai,ETis Biand θis Cithen n is Ni这里 Ai,Bi,Ci和 Ni表示各个模糊子集。
采用Mamdnai型模糊推理的max-min合成法。第i条规则的作用强度为:

通过Mamdnai的“取小”算子(min)模糊推理运算,可得第i条规则对应的控制决策:

这里,μA、μB、μC和 μN分别是 Eψ、ET、θ和 n 的隶属函数。
通过聚类分析,输出量n的最终隶属函数μN为:

这里所得到的输出量仍是一个模糊集,需要进行解模糊化。采用最大隶属度法完成解模糊化过程,则可以得到最终的逆变器的开关状态。
3 滑模变结构控制速度调节器的设计
感应电机直接转矩控制系统的速度调节器一般采用PI调节器,PI调节器可以做到系统输出无静差,但是它的设计是以经典控制理论为基础的,对于非线性、强耦合、参数易变的交流传动来说理论设计与实际的矛盾就比较突出。滑模变结构控制对系统参数的变化和外界干扰的影响不敏感,能使系统的状态按预定的路径变化,使控制系统具有高稳定性、高精度、鲁棒性和快速响应等优点。因此,采用滑模变结构理论设计速度调节器如图4所示。该系统具有响应快、对参数及扰动不灵敏的优点[9]。

图4 滑模速度控制器的交流调速系统
(1)开关面函数的选取[10]
当忽略粘性摩擦时,电机的机械运动方程为:


(3)滑模控制的稳定性
为了证明该滑模系统的稳定性,选取李雅普诺夫函数为:

5 仿真和实验
基于滑模变结构及模糊控制的异步电机调速系统的控制方案如图[4,7]5 所示。在 MATLAB/Simulink中建立了其仿真模型,取测试用异步电机电机参数为:Pn=22kW,Un=380V,In=30A,fn=50Hz,Rs=0.435Ω,Rr=0.816Ω,Ls=2mH,Lr=2mH,Lm=69.31mH,J=0.089Kg·m2电机在转速给定为1200r/min的情况下带负载启动,并在t=0.15s时负载由1Nm阶跃到15Nm,t=0.2s时负载再从15Nm降回1Nm。系统仿真采样周期取为30μs,给定磁链为1Wb。仿真结果如下图所示。
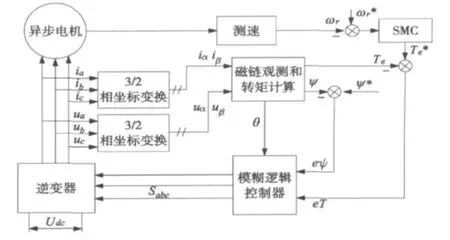
图5 基于滑模变结构及模糊控制的异步电机调速系统的仿真框图


由上述仿真结果可以看出:在模滑模变结构和模糊控制的异步电机直接转矩系统中,转矩的建立比传统控制方案要快,而且转矩波动有所改善,如图7。改进后的电机控制系统的动态响应加快,这从速度响应曲线上可以明显看出来,速度响应时间不到0.1s,如图8。而且定子磁链在建立的过程中比传统DTC方法波动小,如图6。从而定子电流波动比传统控制算法有所改善,这从电流响应曲线上可以清晰地看出来,如图9。另外,在t=0.15s负载由1Nm阶跃到15Nm,t=0.2s时负载再从15Nm降回1Nm时,从图8可以明显看出传统直接转矩控制对外界突加的扰动反应不够迅速,这就导致了电机转速产生波动较大,如图8a。而改进后的系统在同样条件下,能对突加的外界扰动够快速响应,同时电机转速变化较小,从而提高了系统的稳定性和鲁棒性,如图7b和8b。仿真结果验证了本论文提出的滑模变结构和模糊控制算法的有效性。
6 结束语
结合滑模和模糊控制方法设计了滑模速度调节器和模糊逻辑控制器实现了异步电机的直接转矩控制。通过滑模速度调节器,使电动机运行状态电机参数变化和负载波动等因素使调速性能变差的问题得到改善,提高了系统的鲁棒性。同时利用模糊控制的方法改善了矢量电压选择表使系统的动态和稳态特性得到了提高,同时减小了转矩脉动。仿真和实验结果表明该系统有较好的调速性能。
[1]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2009.
[2]周扬忠,胡育文.交流电机的直接转矩控制[M].北京:机械工业出版社,2009.
[3]曹承志,曲红梅.MATLAB软件中SIMULINK环境下直接转矩控制系统的仿真研究[J].电机与控制学报,2001(2):111-114.
[4]张国良,曾静,柯熙政.模糊控制及其 MATLAB应用[M].西安:西安交通大学出版社,2002.
[5]R.Toufouti,S.Meziane,H.Benalla.Direct Torque Control for Induction Motor Using Fuzzy Logic[J].ICGST.ACSE Journal,2006,2(6):19 -26.
[6]秦伟.基于DSP的模糊控直接转矩控制系统的研究[D].辽宁:辽宁工程技术大学,2006.
[7]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[8]Roy A.McCann,Mohatnmad S.Islam.Application of a Sliding-mode Observer for Position and Speed Estimation in Switched Reluctance Motor Drives[J].IEEE Trans on IA,2001,37(1):51 -58.
[9]赵金,杨璐,万淑芸.交流调速系统的一种模糊滑模控制器[J].华中理工大学学报,2002,28(12):49-50.
[10]吴志刚.无速度传感器滑模变结构直接转矩控制系统的研究[D].浙江:浙江工业大学,2004.(编辑 赵蓉)
The Research Based on Sliding Mode Variable Structure and Fuzzy control for Asynchronous Motor Speed Control System
YE Han-mina,ZHUWeib
(a.College of Information Science and Engineering;b.College of Mechanical and Control Engineering,Guilin University of Technology,Guilin 541004,China)
1001-2265(2011)06-0069-04
2010-12-20
广西研究生教育创新计划资助(2010105960811M31)
叶汉民(1965—),男,湖北黄冈人,桂林理工大学信息科学与工程学院教授,研究方向为自动控制系统,(E-mail)yehanmin@163.com。
On the fact of the torque ripple is large in the traditional direct torque control system of the Asynchronous Motor and the problem ofspeed performance ismade slow by the changingmotor parameters and the load fluctuations,the article put forward a new idea.In samewords,the idea is that the traditional PI controller is replaced by speed controller of Sliding Mode Variable Structure.What’smore,on purpose ofachieving better speed regulation,the Inverter voltage vector selection instrument is improved w ith the fuzzy control.On the other hand,the article accomplishes building the simulationmodel of the system through MATLAB/Simulink.The resultmake the system distinguished from others for some advantages.The system is able to increase the response speed and decrease the torque tipple.At the same time,the system is characterized by better static and dynamic stability and better robustness.Key words:sliding mode variable structure;fuzzy control;stability;robustness
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
宇航计测技术(2018年3期)2018-09-08
汽车与新动力(2015年1期)2015-02-27
组合机床与自动化加工技术(2014年10期)2014-03-01
振动、测试与诊断(2014年4期)2014-03-01
汽车与新动力(2014年6期)2014-02-27
