
极坐标框架两轴平台光轴稳定算法
2011-02-22 07:31毛峡刘言梁晓庚
兵工学报 2011年10期
毛峡,刘言,梁晓庚
(北京航空航天大学电子信息工程学院,北京100191)
0 引言
具有后射能力的导弹既可以向前发射攻击前方目标,也可以越肩发射,即发射后旋转180°攻击后方目标,或直接向后发射攻击后方目标[1-2]。俄罗斯后射空空导弹己经进行了成功试射。
在攻击或拦截目标的过程中,导引头的稳定平台使光轴在惯性空间中的指向保持稳定,稳定平台有两轴、3 轴等多种机械结构,其中两轴平台结构相对简单。传统的稳定平台大多采用基于俯仰/偏摆的直角坐标结构,这种结构比较直观,控制简单。但是,直角坐标结构相对比较笨重,不利于轻型化、小型化。基于横滚/偏摆结构的极坐标框架具有结构紧凑,质量轻、尺寸小等特点,具有重要的研究价值[4]。
为了进一步减小导引头的质量和体积,极坐标框架两轴平台利用导弹自动驾驶仪的陀螺传感器信息,通过解算来稳定光轴在惯性空间中的指向[5]。为了使越肩发射的后射导弹能够有效跟踪并攻击后方目标,需要导引头光轴超半球稳定,目前国内对于光轴超半球稳定鲜有研究。
本文分析光轴的特性,提出光轴超半球稳定算法,给出仿真结果及分析。
1 极坐标框架两轴平台光轴特性分析
导引头成像装置安装在内框上,光轴向量在内框坐标系的投影坐标直接影响到光轴稳定的程度以及跟踪的范围。为了使光轴在惯性系中超半球甚至全球稳定,光轴必须能够在惯性坐标系中指向任意方向。设光轴向量为Pg(惯性坐标系),由于要稳定的只是光轴的方向,令Pg的模值为1。应用基于欧拉角的矩阵坐标转换关系式,把光轴向量坐标由惯性坐标系转换到弹体坐标系,如(1)式所示。

式中:Pm为光轴在弹体坐标系中的向量坐标;Tm←g为惯性坐标系到弹体坐标系的转换矩阵,Tm←g=为横滚角、ψ 为俯仰角、γ 为航向角。转换矩阵是非奇异的,由(1)式可知,要使光轴在惯性坐标系中能够超半球甚至全球稳定,则光轴在弹体坐标系中也必须是能够指向超半球甚至全球方向。所以,在弹体坐标系中光轴向量必须能够指向空间的任意方向。光轴在内框坐标系中的坐标为(xi,yi,zi)T,记为Pi.由内框坐标系与弹体坐标系间的转换关系可得

式中Po为光轴在外框坐标系中的向量坐标。成像装置直接安装在内框上,一旦确定安装方式,光轴向量在内框坐标系的投影坐标则为确定的常数值。光轴向量在外框坐标系的投影坐标为(xo,yo,zo)T,由(3)式得
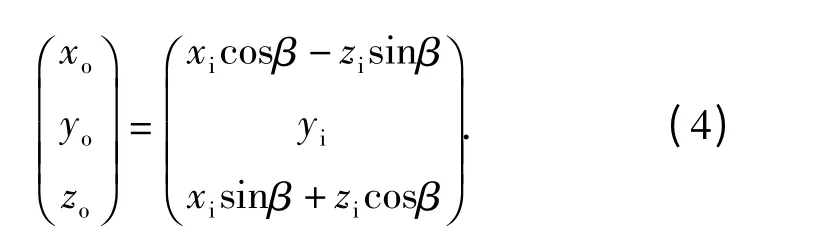
导引头在绕偏摆轴转动的过程中,光轴向量在内、外框坐标系y 轴方向的投影坐标是相等的。
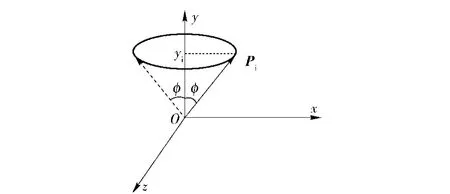
图1 光轴在内、外框坐标系中指向示意图Fig.1 Optical axis in the inner and outer coordinate systems
任意绕偏摆轴(y 轴)转动一周,可以使光轴向量在外框坐标系中指向以原点为始点的圆锥面之内的任意方向。如图1所示,φ 为光轴向量与y 轴的夹角。
由于外框通过横滚轴安装在弹体上,外框坐标系可以在弹体坐标系中围绕横滚轴(x 轴)任意转动,即Pm=Tm←oPo.外框在弹体坐标系中绕横滚轴转动一周,可以使光轴向量在弹体坐标系中指向除“对顶锥体”(“对顶锥体”如图2所示,它是光轴指向范围的形象表示,其范围由光轴向量与内框坐标系y 轴的夹角决定)之内的任意方向,称这个指向盲区为锥体盲区。如图2所示,当光轴向量不与内框坐标系y 轴垂直时,导引头不能通过绕横滚轴和偏摆轴的旋转使光轴指向“对顶锥体”之内的方向。
单个锥体的锥顶角为π-2φ,盲区在立体空间的立体角为


图2 光轴在弹体坐标系中指向示意图Fig.2 Optical axis in the coordinate system
由(5)式可知,要消除光轴向量的盲区,必须使盲区的立体角为0°.这一结论由图2可以形象地体现出来。只有光轴向量在内框坐标系y 轴上的投影坐标为0(即光轴向量在垂直于内框坐标系的y 轴之平面内),才能消除锥体盲区;只有消除了锥体盲区才能使解算结果正确,否则将出现最小二乘解,引入很大的误差。
2 超半球稳定算法
由第1 节讨论可知,必须把导引头光轴定位在内框坐标系的光轴全球稳定跟踪平面之内。由基于横滚/偏摆的两轴平台结构可知,在该平面之内的光轴向量可以通过绕偏摆轴旋转使其在外框坐标系中指向跟踪平面之内的任意方向。依据极坐标框架两轴平台结构以及兼顾解算方法的简化,选取外框坐标系、内框坐标系以及弹体坐标系相应坐标轴指向一致的位置为基准位置,使光轴向量与内框坐标系x 轴重合并且指向相同。
2.1 极坐标框架两轴平台补偿角解算
光轴向量在内框坐标系中投影坐标为(1,0,0)T,记为Pi.将光轴向量坐标转化到惯性坐标系中进行分析。如(6)式所示,

对(6)式进行求导,可得

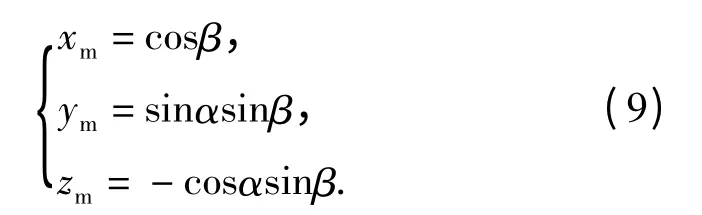
弹体的姿态变化有ω、ψ、γ 3 个量,需要用极坐标框架两轴平台的横滚角α、偏摆角β 进行补偿;(7)式为繁琐的导数关系式,直接对其解算很难得出解析解。因此,本文根据光轴向量在内框坐标系中的特性进行求解。将惯性坐标系中光轴向量的坐标值转换到弹体坐标系中,光轴向量在弹体坐标系中的坐标为(xm,ym,zm)T.依据欧拉角矩阵坐标转化关系,可得

对(8)式进行展开可得
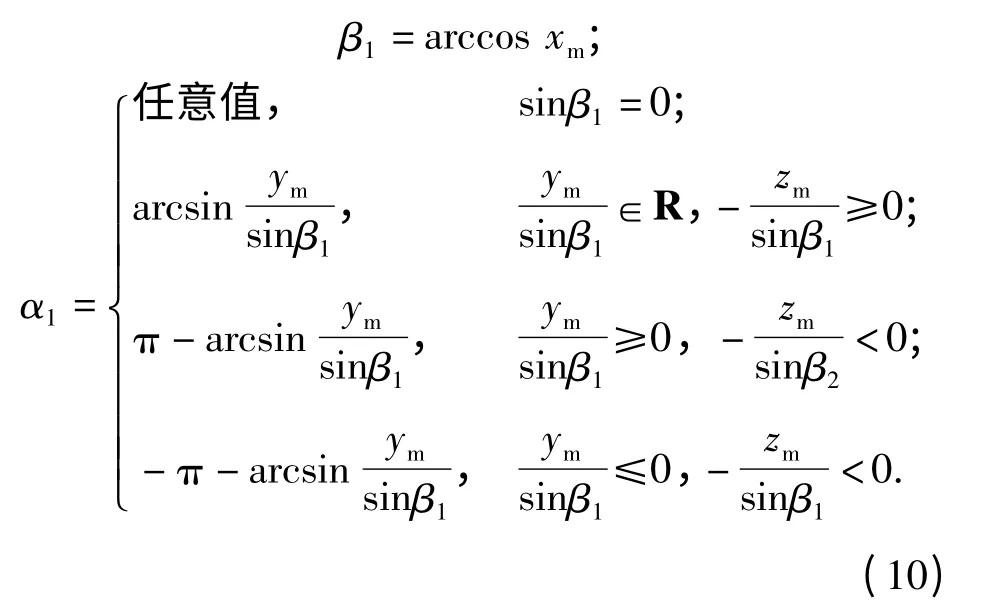
由于旋转角的周期性以及对称关系,为使旋转角的绝对旋转量最小,令角的范围为[-π,π]。由于反余弦函数的数值范围限制,本文得出两组解,如(10)式、(11)式所示。
1)偏摆轴正向解:
2)偏摆轴负向解:

2.2 基于动态规划思想的补偿算法优化
进行补偿控制时,横滚轴和偏摆轴不是由初始位置一次性转动到当前位置,而是由前一时刻位置转动到当前位置。由于在当前时刻解算得到的控制变量有两组解,因此,从前一时刻状态转动到当前状态有两个路径。直接比较以上两组解和的大小,取绝对值和为最小的一组解或者任取其中一组解作为控制角度信息都是不科学的。所以,需要对两组解进行合理的选择,选取一组最优的欧拉角作为控制信号。
为了使补偿角度最小,必须使状态转移按照最短的路径进行补偿。如图3所示。实线为转移的最短路径。
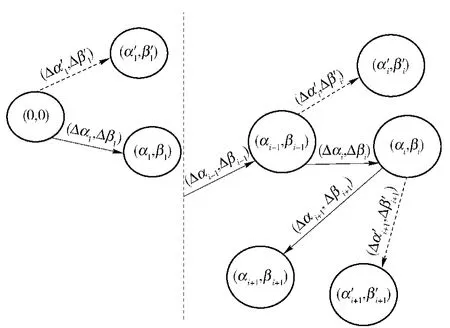
图3 欧拉角位置状态转移图Fig.3 State transition of Euler angle
从基准位置求得的欧拉角有两组值,与当前时刻相应角位置相减得两组增量,比较这两组增量绝对值和的大小,最小的一组即为最短增量路径的角度。该组最小解即为最优的补偿解。选取这组解作为控制信息。基于规划的思想对补偿解进行了合理的选取。此后的决策都是基于当前状态(由上一次决策产生)的最优决策。算法流程框图如图4所示。选取这组解作为控制信号,在一定程度上可以降低对伺服系统动态性能以及最大转速的要求,从而使系统具有快速的跟踪能力。

图4 算法流程图Fig.4 Flow chart of algorithm
3 仿真结果及分析
为了验证本文算法的性能,在不考虑陀螺漂移和测量噪声的状态下[6],利用MATLAB 仿真软件进行了实时仿真。初始状态时弹体坐标系和惯性坐标系重合。由于导引头光轴的稳定是通过稳定光轴向量Pg实现的,为了检验稳定算法对光轴超半球稳定的有效性以及角度补偿特性,本文在惯性坐标系中对光轴向量指向前半球和后半球两种情况进行仿真分析。
3.1 光轴向量指向前半球
当光轴指向前半球时,考虑到目标机动,令光轴坐标为(sinω,0,cosω)T(惯性坐标系),其中ω=π·(1+cost/2)/2,仿真中假设弹体受到沿弹体x 轴、y 轴、z 轴的正弦扰动频率均为3 rad/s,沿弹体x 轴、y 轴的幅度为2 rad,沿弹体z 轴扰动幅度为0.1 rad.取正向解和优化后的解进行仿真,结果如图5所示。
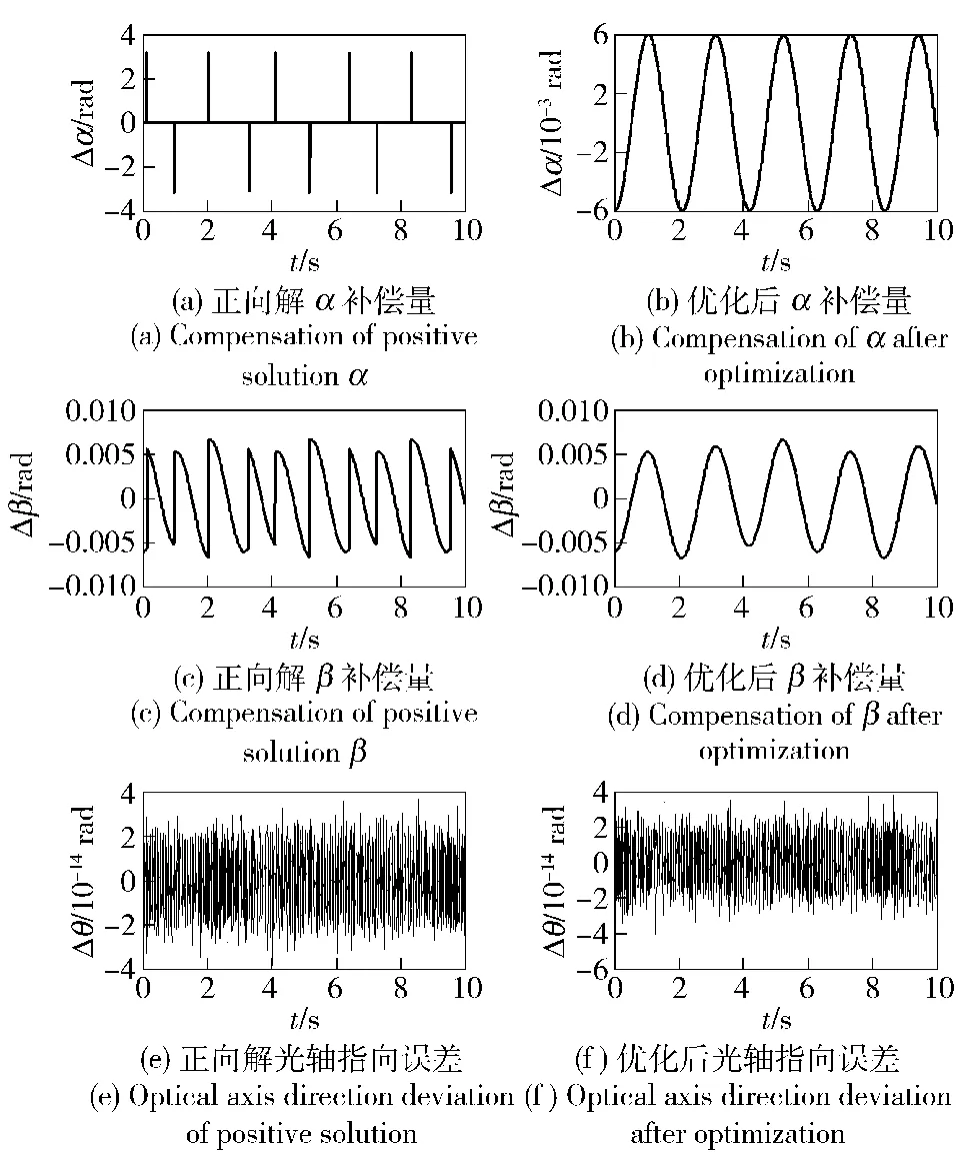
图5 光轴在前半球时补偿量及误差对比图Fig.5 Compensation and error comparison inthe forward hemisphere
图5(a)中横滚角α 补偿量幅度比较大,对其求导后的补偿角速度很大,与之对应的图5(b)中横滚角α 补偿量幅度很小,对其求导后的补偿速度较小,图5(c)、5(d)中优化前后的偏摆角β 补偿量幅度相差很小,优化前的补偿角速度大于优化后的补偿角速度。由图5(e)、5(f)可知,优化前后的光轴指向误差Δθ 很小,接近于0 rad.
3.2 光轴向量指向后半球
当光轴指向后半球时,考虑到目标机动,令光轴坐标为(-sinω,0,cosω)T(惯性坐标系),其中ω=π(3/4+cost/8),仿真中假设弹体受到沿弹体x 轴、y 轴、z 轴的正弦扰动频率均为3 rad/s,沿弹体x 轴、y 轴幅度为2 rad,沿弹体z 轴扰动幅度为0.1 rad.仿真结果如图6所示。

图6 光轴在后半球时补偿量及误差对比图Fig.6 Compensation and error comparison in the back hemisphere
图6(a)中横滚角α 补偿量幅度较大并且对其求导后的补偿角速度很大,与之对应的图6(b)中横滚角α 补偿量幅度很小,对其求导后的补偿角速度较小,补偿曲线变化平滑。图6(c)、6(d)中优化前后的偏摆角β 补偿量幅度相差很小,优化后的角补偿曲线变化平滑;优化前的补偿角速度略大于优化后的补偿角速度。由图6(e)、6(f)可知,优化前后的光轴指向误差很小,接近于0 rad.
通过大量的仿真可知,正向解补偿量的幅度和补偿角度变化率均大于优化后的补偿量,且优化后的补偿曲线变化平滑,它们的稳定误差均接近于0.正向解的补偿量中出现了大角度跳动,是反三角函数的性质导致的,优化后消除了这一问题。从仿真结果可知文中算法具有具有较高的稳定精度。由此可知文中稳定算法的超半球稳定性以及补偿量的有效性。
4 结论
极坐标框架两轴平台光轴超半球稳定对于提高战机后半球防御和攻击能力有重要的意义。本文提出的光轴超半球稳定算法可以很好地抑制弹体的扰动以及目标机动的影响,使光轴超半球稳定,是一种有效可行的稳定算法。
References)
[1] 张华明,姜玉宪.后射空空导弹稳定性问题研究[J].北京航空航天大学学报,2004,30(6):572-576.ZHANG Hua-ming,JIANG Yu-xian.Study on stability of air-toair missile in firing-back attack[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(6):572-576.(in Chinese)
[2] 高劲松,孙隆和.双射弹的擦肩发射原理探索[J].电光与控制,2006,13(6):24-27.GAO Jin-song,SUN Long-he.Study on principle of DRM’s“Merge”[J].Electronics Optics&Control,2006,13 (6):24-27.(in Chinese)
[3] 毛峡,张俊伟.半捷联导引头光轴稳定的研究[J].红外与激光工程,2006,35(5):514-517.MAO Xia,ZHANG Jun-wei.Research on light axis stabilization of half-strapdown seeker[J].Infrared and Laser Engineering,2006,35(5):514-517.(in Chinese)
[4] 董小萌,张平.两轴稳定平台的过顶盲区问题[J].北京航空航天大学学报,2007,33(7):811-815.DONG Xiao-meng,ZHANG Ping.Zenith blind zone of two-axis stabilized platform[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(7):811-815.(in Chinese)
[5] 刘永鹏,高金元,张平.捷联式红外成像导引头光轴稳定研究[C]∥中国航空学会控制与应用第十一届学术年会论文集.北京:中国航空学会,2003:663-667.LIU Yong-peng,GAO Jin-yuan,ZHANG Ping.Research on light axis stabilization of infrared strapdown seeker[C]∥Paper in 11th control and application conference of aviation academy of China.Beijing:Aviation Academy of China,2003:663-667.(in Chinese)
[6] Rudin R T.Strapdown stabilization for imaging seekers,AIAA-93-2660[R].US:AIAA,1993:1-10.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中国典型病例大全(2022年12期)2022-05-13
摄影之友(2020年12期)2020-12-23
电脑爱好者(2018年17期)2018-11-05
中国科技纵横(2016年23期)2017-04-06
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
红领巾·成长(2009年10期)2009-12-02
