主动隔振系统的辨识与自适应控制研究
2011-04-15 09:37肖作超武汉理工大学自动化学院湖北武汉430070
长江大学学报(自科版) 2011年13期
肖作超 (武汉理工大学自动化学院,湖北 武汉430070)
张锦光 (武汉理工大学机电工程学院,湖北 武汉430070)
振动主动控制技术广泛应用于汽车、机械等领域,其主要控制方法有反馈控制与前馈控制[1]。由于振源信号大都是可测的,因此基于自适应滤波技术的前馈控制成为降低振动噪声的有效手段[2-3]。但是由于该方法需要得到精确的控制通道模型,而用理论建模的方法往往会忽略掉真实试验环境中的许多不确定性因素。因此,通过系统辨识,即采用试验的方法建模得到系统输入输出的试验数据,然后根据测得的数据进行辨识,从而得到最接近实际系统的模型。选取单层隔振系统进行了试验,根据试验数据,进行了系统辨识,并结合系统的实际情况选取合适模型,进行了PID和基于自适应滤波技术的前馈控制仿真研究。
1 单层隔振系统的辨识
1.1 单层隔振系统结构
单层隔振系统结构图如图1所示。M为振源,在实际系统中多为电动机或柴油机等旋转动力机械;F为被动隔振弹簧,作动器1和作动器2对称地布置在隔振板的左右两侧。隔振器和作动器投影平面图如图2所示。1、2这2个点代表的是作动器1、2在隔振板正下方的投影;3~6这4个点表示隔振器3、4、5、6在隔振板正下方的投影。在这6个点对应的隔振板的正上方分别布置了加速度传感器,通过信号发生器给作动器激励信号,测得每个点的加速度,根据测得的数据进行辨识。

图1 单层隔振系统结构图

图2 隔振器和作动器投影平面图
1.2 最小二乘法辨识
单层隔振系统的辨识算法采用的是最小二乘算法,考虑如下的线性系统:

式中,x(k)为系统参考信号;e(k)为系统输出;d(k)为参考信号经过扰动通道后加在系统输出点处的噪声信号;an和bn分别为系统模型G(z-1)的分母与分子的系数。
系统模型如图3所示。G(z-1)是系统函数模型,N(z-1)为扰动通道模型,y(k)为参考信号经过系统模型之后产生的响应。将差分方程写成标准的最小二乘形式后,可以证明,当噪声d(k)是平均值为0的高斯白噪声时能够实现无偏估计。
采用最小二乘算法,使用Matlab中的系统辨识工具箱进行辨识[4],将2个作动器的输入电压分别对应图2中3~6这4个点处的加速度的模型,从而得到8个传递函数。在辨识的时候,模型阶数的选取十分重要;若阶数选取太低,则拟合的效果会不太理想,若阶数太高,幅值拟合效果会变好,但是相位会出现较大的变化。综合考虑实际系统的振型等因素,针对该研究模型,辨识选取的阶数为10阶。
图4是作动器1辨识得到的模型的频响与其试验数据做功率谱分析得到的频响进行对比的结果。从图4可知,无论是幅值还是相位的拟合都比较一致,证明基于该方法的系统辨识是有效的,能够较完整地描述实际系统的输入输出特性。

图3 单输入系统模型图

图4 辨识出的模型频响曲线与实际系统频响曲线对比
2 仿真试验
2.1 PID控制仿真
在实际隔振系统中,传统的PID控制方法由于其实现简单、便于调整等优点而得到广泛应用。PID反馈控制效果与被动隔振效果对比如图5所示。从图5可以看出,PID反馈控制比被动隔振的振幅减小了30%。
由于该模型通过实际系统辨识得到,其阶数较高,而且辨识的模型中还包含了作动器的执行机构等电气元件和一些非线性环节,因而采用PID反馈控制取得的隔振效果并不十分理想。为此引入前馈控制作为主动控制算法的核心进行研究。

图5 PID反馈控制效果与被动隔振效果对比(干扰信号频率为50Hz)
2.2 前馈控制仿真
图6为采用自适应滤波器的前馈控制的一般形式。在图6中,u(k)为前馈控制器的输出信号,在x(k)和u(k)之间设置一个FIR滤波器,通过自适应更新其权系数矩阵W(k)来抵消干扰信号的影响,y(k)为u(k)经过控制通道之后的信号,控制通道就是通过辨识的方法得到的系统模型。前馈控制器的输出还需要经过控制通道之后才能与扰动信号相抵消,而控制通道是已经固定下来的实际物理系统,因此在设计算法的时候需考虑控制通道的影响。
前馈控制器的算法核心采用最小均方(LMS)算法[5-6],该算法是自适应前馈控制中应用最广泛的算法之一,结合所研究的系统参数设置,其形式为:

式中,W(k)为当前时刻滤波器的权系数矩阵;W(k+1)为下一个采样点时刻的滤波器权系数矩阵;μ为自适应收敛的收敛因子,Δe(k)为当前时刻采样得到的系统误差信号。

图6 自适应滤波前馈控制的一般形式
设FIR滤波器的阶数为N,则k时刻FIR滤波器的输出为:

辨识得到控制通道模型表达式为:

式中,u为输入;y为输出;A、B为模型系数向量。
则控制信号u(k)经过控制通道后在检测点处的响应y(k)为:

可得:

式中,xrT(k)=x(k)A/B,也就是将参考信号经过控制通道之后形成的信号作为新的滤波LMS算法的参考信号,这样设计控制器时就考虑了控制通道对信号的影响,相应的FIR滤波器权系数矩阵的自适应更新公式为:

根据上述算法编写Matlab程序进行仿真,仿真结果如图7所示。所选取的模型为辨识得到的作动器1的输入电压为输入、隔振器3上方的加速度为输出的模型,图7中的参考信号、干扰信号、输出信号和误差信号分别代表图6中的x(k)、d(k)、y(k)、e(k)。从图7可以看出,在给系统一个参考信号后,经过控制通道时,信号的幅值和相位均产生变化,在控制器的作用下,最后系统输出的误差信号已接近于0,这表明隔振器3上方点处的加速度已接近于0,振动干扰基本上被抵消了。
因为真实系统的干扰源有可能是几个工作在不同频率下的电动机或更复杂的干扰源,为了进一步验证自适应滤波前馈控制的效果,加入了双频干扰并改变模型进行测试,选取的模型为辨识得到的作动器2的输入电压为输入、隔振器5上方的加速度为输出的模型。图8为加20Hz和50Hz双频干扰时的仿真结果。由图8可知,在改变干扰频率之后,经过一段时间的调整,隔振器5上方处的加速度也很快减小到接近于0的水平。通过上述仿真可以看出,在隔振效果和自适应性方面,前馈控制比PID反馈控制具有明显优势。
3 结 语
针对单层隔振系统进行了基于最小二乘法的系统辨识,辨识得到的模型与真实系统的频响基本一致,辨识得到的模型很好地描述了真实系统的输入输出特性。对辨识得到的模型进行了PID反馈控制和基于自适应滤波LMS算法的前馈控制仿真,仿真结果表明,对于振源可测的隔振系统,采用基于自适应滤波LMS算法的前馈控制与传统的PID控制相比,其在隔振效果和自适应性方面具有更好的应用效果。

图7 干扰频率为50Hz时自适应滤波前馈控制仿真结果
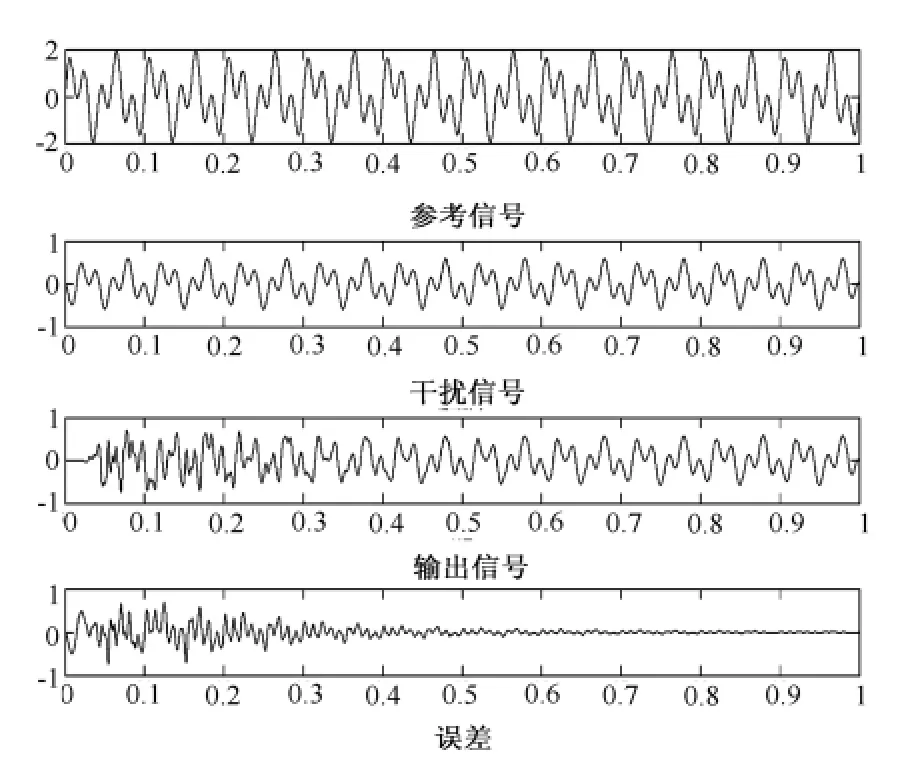
图8 干扰为20和50Hz的双频干扰时自适应滤波前馈 控制仿真结果
[1]陈克安.有源噪声控制 [M].北京:国防工业出版社,2003.
[2]聂建华,李晟.基于前馈自适应滤波的零跟踪误差伺服控制器 [J].制造技术与机床,2007,50(9):109-112.
[3]Sommerfeldt S D.Multi-channel adaptive control of structural vibration [J].J of Noise Control Engineering,1991,37 (2):77-89.
[4]侯媛彬,汪梅,王立琦.系统辨识及其Matlab仿真 [M].北京:科学出版社,2004.
[5]李盈颖,万建伟,周良柱.一种改进的变步长归一化LMS算法 [J].国防科技大学学报,1999,21(1):94-96.
[6]邱天爽,魏东兴,唐洪,等.通信中的自适应信号处理 [M].北京:电子工业出版社,2005.
[7]成磊,葛临东.变步长LMS算法性能比较与仿真 [J].信息工程大学学报,2003,4(4):70-73.
猜你喜欢
华东师范大学学报(自然科学版)(2021年3期)2021-06-03
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
东坡赤壁诗词(2019年3期)2019-07-05
测控技术(2018年11期)2018-12-07
教育教学论坛(2018年39期)2018-09-25
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
噪声与振动控制(2016年4期)2016-09-01
电测与仪表(2016年10期)2016-04-12
浙江大学学报(工学版)(2015年8期)2015-03-01