
轨道基准网高程测量及其数据处理方法的探讨
2011-05-04 08:43刘成龙杨雪峰李书亮
铁道建筑 2011年8期
郑 健,刘成龙,杨雪峰,李书亮
(西南交通大学 土木工程学院,成都 610031)
1 内容概述
博格板式无砟轨道系统技术是我国引进的一种无砟轨道结构形式,经过消化、吸收、再创新,形成中国特色的板式无砟轨道,称为Ⅱ型板式无砟轨道技术[1]。在高速铁路精密工程测量方面,博格无砟轨道系统与其它轨道系统的重要区别之一,是在轨道控制网CPⅢ下多了一级加密控制网,这一级网德国称之为 GRN,我国目前称之为轨道基准网。轨道基准网由一系列的控制点组成,这些控制点德国称之为 GRP,为简单明了,本文中仍沿用德国称法,称之为 GRP。在Ⅱ型无砟轨道板施工过程中,轨道基准网主要作为轨道板精调施工测量控制的基准,而轨道的精调则仍是以CPⅢ控制网作为其测量控制的基准。
实际上,为了加快Ⅰ型无砟轨道板和轨道精调的速度,也可为Ⅰ型无砟轨道板布设轨道基准网。在沪宁城际铁路的建设过程中,便布设了轨道基准网。沪宁城际铁路的轨道基准网,不仅作为轨道板精调的基准,而且还作为长轨精调的基准。沪宁高速铁路的成功实践证明,沪宁城际铁路的轨道基准网,不仅为轨道板与轨道的顺利和高精度精调打下了良好的测量基础,而且为保证沪宁城际铁路的建设工期创造了有利的条件。
轨道基准网由一系列的轨道基准点组成,在Ⅱ型板上它布设于6.45 m长轨道板的板缝之间。轨道基准网主要有以下几个特点:沿轨道轴线布设,且左右线分开布设,先依据CPⅢ网,粗略放样GRP,然后精确测量GRP的三维坐标;轨道板安装对轨道基准网精度要求极高,其平面网相邻GRP点间的相对点位中误差<0.2 mm,高程网相邻 GRP点间的高差中误差 <0.1 mm;GRN的平面网和高程网分开分别测定和数据处理,以提高 GRP测量的精度[2]。
由于轨道基准网在最近几年才引入我国,又是Ⅱ型轨道板安装必不可少的施工控制网,同时其精度要求极高,在我国当前高速铁路的应用过程中仍存在诸多问题,因此本文就轨道基准网高程测量及其数据处理方法的相关内容进行探讨,介绍其高程测量和数据处理的德国方法,并推出其高程网数据处理的新方法,最后采用工程实测数据对比两种数据处理方法的结果,分析和总结各自的优缺点。
2 轨道基准网高程测量方法
GRP的高程测量应该在轨道板初铺之后进行,以避免二期荷载对GRP的高程造成影响[3]。
轨道基准网高程测量的方法是:采用高精度电子水准仪和一把配套的条码水准尺,左右线分开分别测量,以附合水准路线和中视法支水准路线相结合的方法,分别对轨道两侧的 CPⅢ点和轨道中央的 GRP点进行测量,电子水准仪的测量模式应设置为“后视(CPⅢ点)—中视(GRP点)—中视(GRP点)…前视(另一个CPⅢ点)”;同一条附合水准路线应该进行往返观测,相邻的附合水准路线与附合水准路线之间应该进行GRP点的搭接。之所以在测量过程中只用一把水准尺,是为了消除常规精密水准测量两把水准尺的零点误差对相邻GRP点之间高差精度的影响;之所以采用中视法测量,是为了提高GRP点高程测量的效率。
德国GRP点高程测量外业观测时,应按下列方法和要求进行:
1)水准仪设站点应尽量位于同侧相邻两个CPⅢ控制点之间。GRP点高程测量的主要技术要求,应满足表1要求。

表1 GRP点高程测量的主要技术要求 m
2)每测量300 m左右的GRP水准路线,应与线路同侧稳定的CPⅢ控制点附合一次,构成一条附合水准路线。附合水准路线的闭合差fh为

式中,a为CPⅢ点高程控制点的高程允许偏差(mm),取0.5 mm;b为每公里水准测量的偶然中误差(mm),取2 mm;S为单程附合水准线路的长度(km)。
3)同一条附合水准路线应进行往返观测,当往返测的闭合差满足要求后,应分别平差计算往返测的GRP点高程,往返测的同名GRP点的高程较差应<0.6 mm;
4)同一条附合水准路线内,作为起点和终点的CPⅢ点高程,采用CPⅢ控制网高程测量的成果,而路线内其余CPⅢ点则均作为转点,其高程只用于与 CPⅢ的建网高程成果进行对比。桥梁上的GRP点高程测量的附合水准路线,作为附合路线起点和终点的CPⅢ点,应该是位于固定支座端正上方的CPⅢ点,以避免温度对CPⅢ点高程的影响。附合路线内所有GRP点均作为中视点,按中视水准测量的方法,对两CPⅢ点之间的各GRP点的高程进行测量。
5)同一附合水准路线内,相邻测站之间不需要对GRP点进行重复高程测量或高程搭接测量。
6)相邻的不同附合水准路线之间需要进行 GRP的重复观测或搭接观测,重复观测或搭接观测的GRP点数应不少于5个;搭接区内各GRP点的高程较差应≤0.3 ×(n-1)mm(n为搭接点个数)[4]。
以左线往测附合路线为例,GRP点高程测量的方法如图1所示。左线返测以及右线GRP点高程测量方法均与此类似,在此不再赘述。
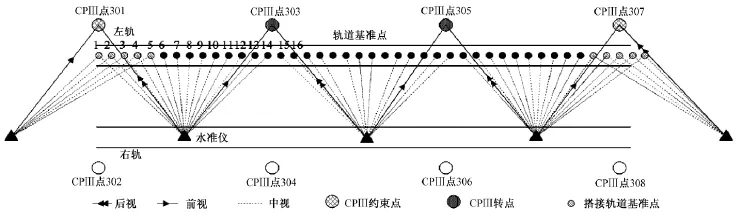
图1 GRP点高程测量方法示意(左线往测)
GRP点高程测量的外业观测,既要在CPⅢ点上立尺测量,又要在GRP点上立尺测量。测量时,CPⅢ控制点的高程测量标志,可采用CPⅢ棱镜组件中的水准杆;而GRP点的高程测量标志,则可采用条码水准尺配合底部对中配件进行测量,底部对中配件及其安装如图2所示。测量时,底部对中配件的尖端直接放置在GRP点的平面标志上。底部对中配件出厂时应精确测量其高度,以便对水准测量的数据加以修正[5]。
3 德国GRN高程网平差计算方法
当GRN高程网往、返测附合水准路线闭合差满足要求后,可按照德国方法进行GRP点高程测量的平差计算。德国方法进行GRP高程测量数据处理时,应先将往返测附合水准路线分开分别进行平差计算,当计算的往返测同名点高程较差合格后,再将往返测同名点的高程取均值作为最后的高程。
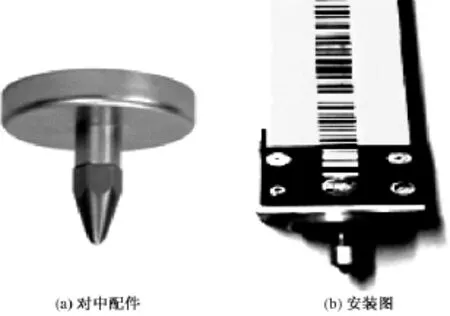
图2 GRP高程测量标志底部对中配件及其安装示意
德国方法往测附合水准路线数据处理时,先对作为转点的CPⅢ控制点进行平差计算,然后计算各GRP点的高程。即先将闭合差按距离成比例反号改正分配到各转点上,假设分配量为Δ(由于两CPⅢ点间的距离都大致相等,所以这里假设每个 CPⅢ点分配量相同),得到各转点处CPⅢ点的高程。然后在第一测站内,以附合路线起点的CPⅢ高程为起始点,对起始点到本测站内的各GRP点间的高差进行站内高差改正,改正数也为Δ,之后采用改正后的高差计算本测站内各GRP点的高程;在第二测站内,以本站后视点即CPⅢ转点为起始点,并考虑站内各GRP点的高差改正,此时改正数应该是Δ/2,然后也采用改正后的高差计算第二测站内各GRP点的高程。以此类推,计算后续各测站内各中视GRP点的往测高程。
在返测水准路线闭合差满足要求后,也按与上述往测相同的方法计算各测站内各中视GRP点的返测高程。当满足往、返测各GRP点的高程较差<0.6 mm后,最后取各GRP点的往、返测高程的均值,作为本段附合水准路线内各GRP点的最后高程。
4 GRN高程网平差计算的新方法
当GRP往返测附合水准路线闭合差满足要求后,方可按照新方法进行GRP点高程测量的平差计算。按照新方法进行GRP高程测量数据处理,也应先将往、返测附合水准路线分开分别进行平差计算,当往、返测高程较差满足要求后,再将往、返测水准路线合并在一起进行平差计算。
新方法往测附合水准路线平差计算时,是把相邻两个CPⅢ点间的观测高差和CPⅢ点与之相邻的测站头尾GRP点间的观测高差,以及位于这两个CPⅢ点之间的相邻GRP点间的观测高差,构成闭合水准路线;以此类推,相邻两个CPⅢ点间均可构成一条闭合水准路线,最后把往测附合水准路线内所有闭合水准路线组合在一起,形成往测水准路线平差计算的水准网。按照最小二乘原理对该水准网进行间接平差,就可以获得往测GRP附合水准路线中各GRP点的平差高程和相邻GRP点间的高差中误差。
下面介绍测站间的相邻GRP点的高差中误差计算方法。以图1中 GRP点14到15为例,设 GRP点14到 CPⅢ点303的观测高差为 h1,303到 GRP点15的观测高差为h2,GRP点14和15的高程分别为H14和H15,平差后 GRP点14到303点的高差中误差和303点到 GRP点15的高差中误差分别为 mh1和 mh2,则有

式(2)中H15-14为相邻GRP点14至15的高差。由式(2)按误差传播定律可得

式(3)中的mH15-14即为测站间的相邻GRP点间的高差中误差,其它测站间的相邻GRP点间的高差中误差计算方法依此类推,这样就能把所有相邻GRP点的高差中误差计算出来。
同理,返测水准路线也可按与上述往测相同的方法平差计算各GRP点的返测平差高程和相邻GRP点间的高差中误差。
当满足往返测各同名GRP点的高程较差<0.6 mm后,最后把往返测水准网的观测值合并在一起进行平差,作为本段附合水准路线内各GRP点的最后高程和最终精度。
现以图1为例,说明新方法的附合水准路线与闭合水准路线组成情况。新方法要求主线CPⅢ点间高差与后续 GRP点中视高差测量分开进行,301-303-305-307为附合水准路线,301到303两个 CPⅢ点间的闭合水准路线为301-1-2-3-4-5-……-13-14-303-301。同理可组成303到305、305到307 CPⅢ点间的闭合水准路线,最后把附合水准路线内所有的闭合水准路线组合在一起,形成往测水准路线平差计算的水准网。返测附合路线的平差方法与往测类似,在此不再赘述。
5 两种平差计算方法结果的对比分析
为了观察和分析上述两种方法计算的GRP点高程是否存在显著性差异,用上述两种方法计算了某客运专线1 286个GRP点的高程,并统计两种方法计算的GRP点高程的较差情况。统计结果如图3和图4所示。图3是高程较差分布的区间、高程较差落入某一区间的个数及其百分比的统计结果;图4是高程较差正态性的检验结果。
从图3可以看出:1 286个高程较差落入(-0.08 mm,0.08 mm)区间的个数有1 076个,百分比为83.67%;1 286个高程较差落入(-0.12 mm,0.12 mm)区间的个数有1 235个,百分比为96.03%;1 286个高程较差落入(-0.20 mm,0.20 mm)区间的个数有1 286个,百分比为100.00%。这说明这些 GRP点采用两种方法计算的高程较差大部分都在0.12 mm以内,没有高程较差>0.20 mm的GRP点。
从图4可以看出:1 286个GRP点高程较差的分布呈服从正态分布的趋势,但又不完全服从正态分布,究其原因可能是样本量小的缘故,可通过进一步的大量统计进行验证。但从图4还可以看出,小的高程较差比较多,且主要分布在(-0.08 mm,0.04 mm)区间内,说明两者间的差异主要是由偶然误差引起的。
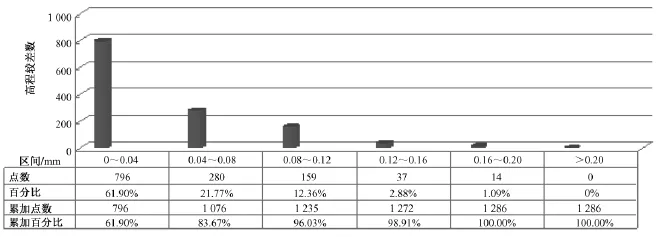
图3 高程较差绝对值分布区间统计示意
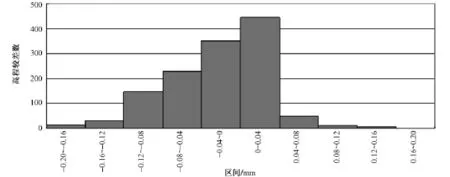
图4 高程较差分布区间柱形图
上述统计结果表明,两种方法计算的高程结果相差较小,96.03%在0.12 mm以内,因此从概率的角度说明两种方法计算的高程没有显著的差异,其计算结果是基本一致的,说明这两种GRP高程网数据处理方法都可用于GRN高程网的平差计算,但按本文推出的平差计算新方法,可探测粗差和进行精度评定,因此应该是GRN高程网平差计算的更好方法。
6 结语
本文首先介绍了GRN高程网的测量方法及其德国GRN高程网的平差计算方法,之后推出了基于间接平差原理的GRN高程网平差计算的新方法。通过分析两种不同的平差计算方法的计算流程与结果差异,证明本文推出的采用间接平差法进行GRN高程网的平差计算结果,与德国的平差计算方法的结果是一致的,说明本文推出的GRN高程网的平差计算新方法是正确可行的,而且新方法还可探测粗差和进行精度评定,因此我国高速铁路轨道基准网之高程网的平差计算,应该采用本文介绍的新方法。鉴于当前的“高速铁路工程测量规范”缺乏轨道基准网之高程网平差计算方法的相关规定,因此本文的研究结果还可供相关规范补充完善时加以借鉴。
[1]中铁十七局京津城际轨道项目经理部.CRTSⅡ型板式无砟轨道系统技术介绍材料[R].北京:京津城际轨道项目经理部,2007.
[2]中华人民共和国铁道部.高速铁路无砟轨道精调作业指南[M].北京:中国铁道出版社,2009.
[3]石德斌,王长进.高速铁路无砟轨道基准网(CP4)测量和数据处理研究[C]//高速铁路精密测量理论及测绘新技术应用国际学术研讨会论文集.成都:西南交通大学出版社,2010:156-161.
[4]张银虎,李书亮,余鹏,等.轨道基准点(GRP)在 CRTSⅠ型板式无砟轨道施工中的应用[C]//高速铁路精密测量理论及测绘新技术应用国际学术研讨会论文集.成都:西南交通大学出版社,2010:252-257.
[5]赵国堂,蔡弘,李刚.CRTSⅡ型板式轨道铺设自动精调系统及设备研究[J].铁道建筑,2010(11):104-107.
猜你喜欢
煤气与热力(2021年10期)2021-12-02
北京测绘(2021年1期)2021-02-05
装饰装修天地(2020年11期)2020-07-04
化工设计(2020年6期)2020-01-13
家庭影院技术(2018年11期)2019-01-21
铁道勘察(2018年5期)2018-10-22
劳动保护(2018年8期)2018-09-12
公民与法治(2016年19期)2016-05-17
房地产导刊(2015年6期)2015-10-21
读者·校园版(2015年7期)2015-05-14
