
面向安保的多机器人协同系统研究与设计
2011-05-11 02:49李华雄王永霞
制造业自动化 2011年8期
李华雄,王永霞,杨 丽
(1. 天津职业技术师范大学 科技产业处,天津 300222;2. 天津职业技术师范大学 自动化与电气工程学院,天津300222;3. 天津信息感知与智能控制重点实验室,天津 300222)
面向安保的多机器人协同系统研究与设计
李华雄1,王永霞2,3,杨 丽2,3
(1. 天津职业技术师范大学 科技产业处,天津 300222;2. 天津职业技术师范大学 自动化与电气工程学院,天津300222;3. 天津信息感知与智能控制重点实验室,天津 300222)
0 引言
现代社会是一个人口密集、高度复杂的社会,人类的活动范围越来越大,面临的突发事件和异常事件越来越复杂,安保工作的难度和重要性也越来越突出。
安保机器人(Security Robot) 用于维护社会治安、保卫国家财产和人民生命财产安全的机器人。目前对安保机器人的研究大部分都是针对公共场合的,对人的贴身保安研究比较少,且较少是多机器人系统。针对上述问题,本文开展了面向安保的多机器人系统及相关技术和算法研究。
论文以下内容结构安排如下:第一部分给出了多机器人系统的总体方案,第二部分研究相应的多机器人定位、避障、编队及协同围捕算法以及仿真,第三部分给出了部分物理实验,进一步验证上述系统、算法及软件的可行性。
1 多移动机器人协同系统总体设计及平台构建
1.1 系统总体结构设计
多机器人系统依靠几个机器人的简单组合并不能充分发挥其优势,只有通过某种形式的协作才能实现其对复杂任务的处理。多个机器人要实现相互协作就必须确定机器人之间逻辑上和物理上的信息关系和控制关系,以及问题求解能力,如何分布等问题。
本文设计的多机器人系统各子系统之间的关系如图1所示。整个多移动机器人系统包括通信子系统,多机器人控制子系统,多机器人运动子系统及全局视觉监控子系统。其中前三个子系统是建立在机器人平台基础上的,全局监控系统是独立于机器人之外的视觉子系统。全局监控子系统也具有通信功能。图1中箭头表示信号的传输方向,箭头旁的数字代表数据流顺序。控制系统通过一定的策略控制机器人运动系统进行运动,全局视觉监控系统监控运动情况,并在必要时通过无线通信系统将信息传输给多机器控制系统,构成闭环系统,保证系统安全和控制精度。
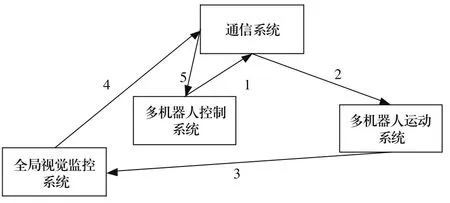
图1 多移动机器人系统组成
本文采用任务级协作的混合分层的机器人控制体系结构。该结构由系统监控层,协调控制层和行为控制层构成,系统结构框图如图2所示。
1.2 平台构建及作业流程设计
本文的多机器人系统主要由Active Media公司的先锋机器人组成。多机器人系统中的被保护者,保安leader,3个保安follower分别由一个Amigo,一个P3-DX和三个先锋Amigo担任。被围捕者由人或Freescale小车担任。本文所设计的多机器人系统作业流程图如图3所示。
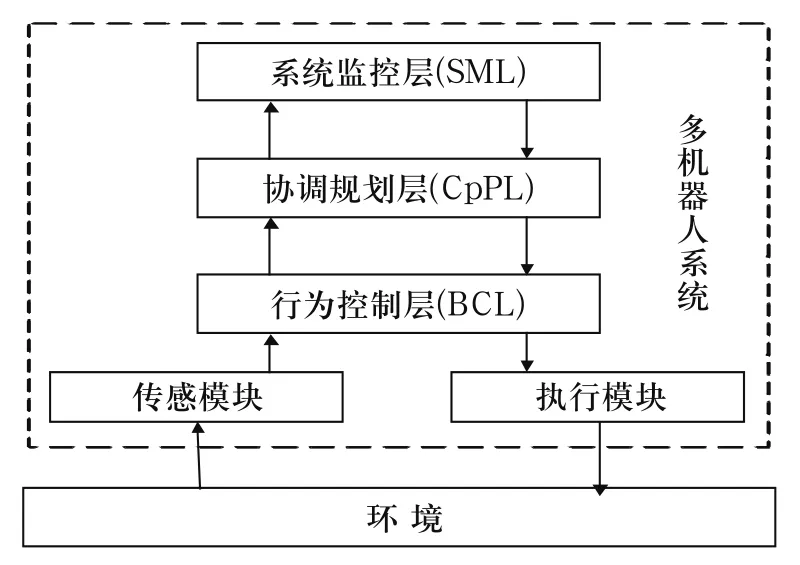
图2 多机器人系统体
多机器人系统通信是机器人进行交互和组织的基础。通过通信,多机器人系统中各机器人了解其他机器人的意图、目标和动作及当前的环境状态等信息,进而进行有效的协商,协作完成任务。机器人之间的通信分为隐式通信和显式通信两类。多移动机器人系统通信结构如图4所示。图4中端程序VNC viewer 远程登录P3-DX,这样可以实现对P3-DX的远程控制。采用C/S架构搭建多机器人系统无线局域网,利用Socket网络编程实现C/S架构网络,其中 P3-DX为服务器端,Amigo及监控摄像机为客户端。Amigo可以执行由Visual Studio 2005开发的应用程序可执行文件,PC通过无线局域网与其发生通信。
2 多移动机器人系统典型问题算法仿真研究
针对本文所研究的多机器人安保系统,其最典型的任务就是协作围捕。为保证机器人实验过程上的安全,针对避障、编队、围捕策略,本文首先在MobileSim上进行了仿真实验。由于MobileSim不自带视觉仿真功能,因此基于视觉信息的定位和避障实验在机器人实体上 虚线框中远程登录用PC通过远程登录客户端VNC-Viewer登录P3-DX,对P3-DX进行监控,同时方便了机器人运动。P3-DX与PC之间采用C/S架构,通过无线局域网进行无线网络通信,P3-DX作为服务器端,PC利用客户进行,某些避障,编队和围捕策略仿真时采用里程计和声纳进行定位,仿真结果合理则将其应用于机器人实体上。由于篇幅所限,下面重点介绍基于机器人本体的系统定位算法,以及多移动机器人协作围捕两个内容
2.1 基于机器人本体的系统定位算法
系统中每个机器人根据自身所带有的传感器进行不同方式的定位。
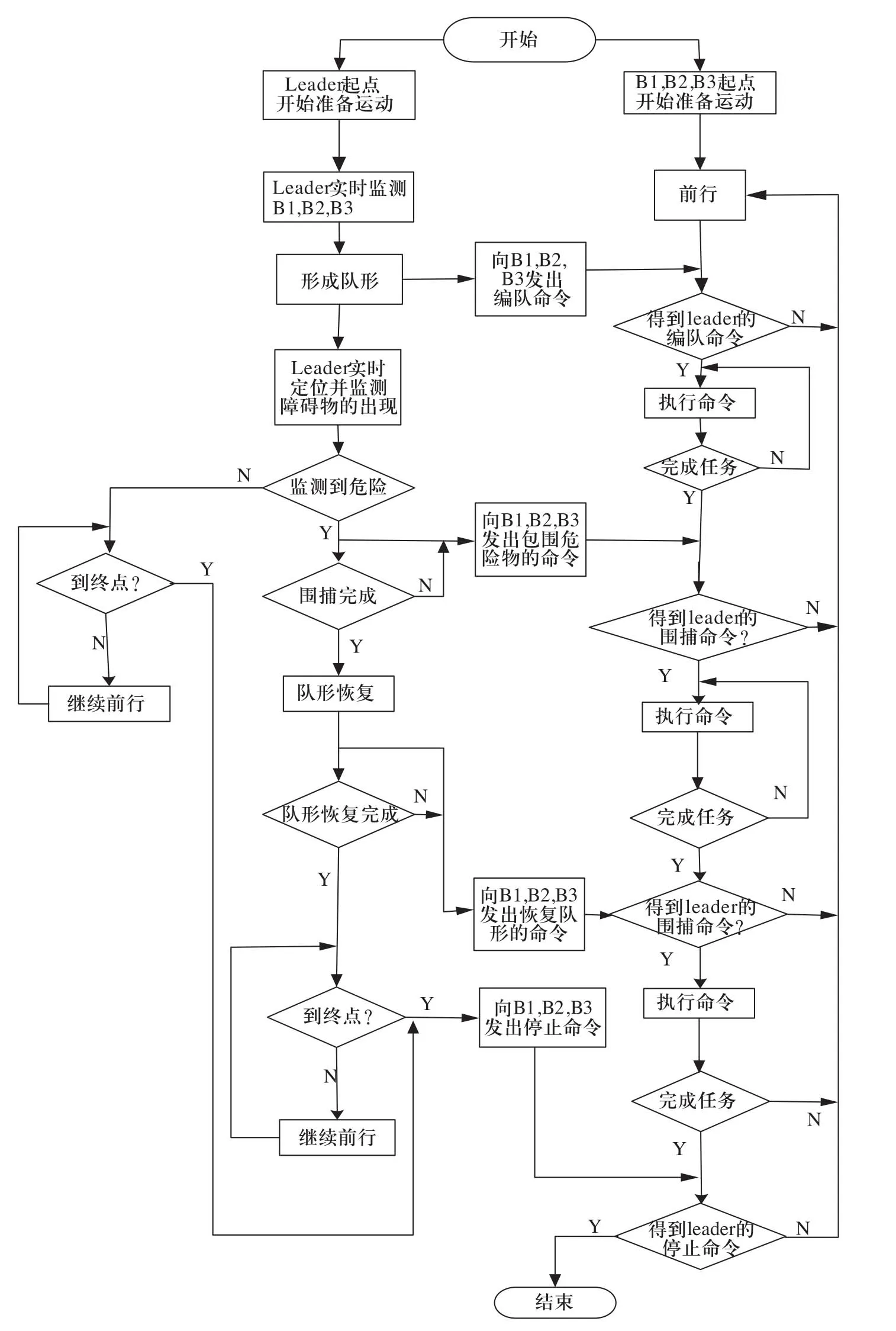
图3 多机器人系统作业流程图
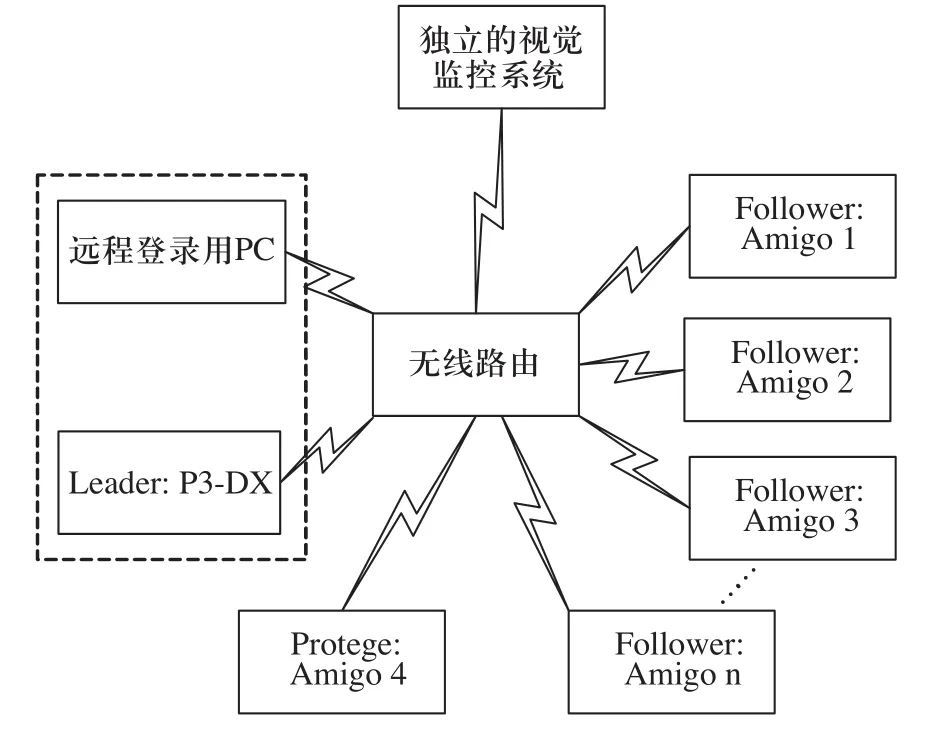
图4 多机器人系统通信体系框图
2.1.1 P3-DX定位
作为整个系统的领导者,P3-DX定位需要达到高实时性和高精确性。因此,本文采用SURF算法[1]应用模型,进行路标检测及测距实现定位。
图5为本文设计的SURF算法的应用模型,首先进行物体的初次检测,采用背景减法进行物体的初次提取,获取物体的模板,并提取物体模板中的SURF特征,当获取到第n帧图像,中SURF特征检测,输入至滤波器中,由滤波器预测第n+1帧中的物体位置,预测出的物体位置上进行SURF特征提取与模板中的SURF特征进行比较,获取精确的物体位置,作为第n+1帧中的物体位置,该位置信息用于校正滤波器。
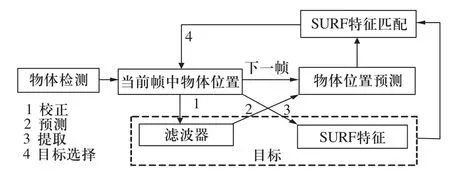
图5 SURF算法应用模型结构图
2.1.2 Amigo定位
被保护者Amigo在整个过程中被控制保持直线运动,保证其里程计的定位精度(里程计在转弯时使累积误差增大,这样会导致定位精度不够)。其余Amigo自身带有里程计,可以进行定位,用于判断是否达到P3-DX控制的位置。但是由于里程计在转弯情况下会使定位误差增大,因此只能用于辅助定位。
2.1.3 协作定位
1)坐标系
走廊的中点为原点,前进方向为X方向,垂直于前进方向为Y方向。
2)具体方法
被保护者沿预设轨迹进行运动,轨道两旁设有路标,路标之间的距离为2m,被保护者Amigo的速度一定,每经过一个路标发一次信号给P3-DX,供其判断行程。由于P3-DX通过视觉检测可以检测出路标,通过收到的信号可以计算出走过了几个路标,由路标间距乘以经过的路标个数与检测及摄像机标定出的距离之矢量和为P3-DX的实际位置。其余Amigo采用P3-DX进行位置控制,并用里程计和声纳定位反馈。P3-DX通过处理自身获取的视觉信息,来制定相应的策略,控制Amigo运动。定位实验及精度分析。
整个系统的定位采用协作定位机制,大大提高了精度。
2.2 多移动机器人协作围捕
2.2.1 多移动机器人协作围捕算法分析
目前协同围捕的方法有多种,如基于势点的围捕算法[2],基于“虚拟范围”的多机器人围捕算法[3],基于虚拟力的围捕算法[4],基于动态角色的围捕算法[5]等。
针对多移动机器人安保系统的需求,本文采用了基于虚拟力的围捕算法实现围捕。
2.2.2 多移动机器人协作围捕算法仿真
本文中涉及的围捕任务分析如下:当系统保持队形行进至某一位置时,入侵者想袭击被保护者;由P3-DX判断是否为被围捕对象,并制定了相关围捕策略,包围袭击者。
假设当入侵者察觉自己被发现后依然不采取逃避策略,其运动形式保持不变或者停止运动。本文采取了收缩包围圈策略,即基于leader的队形控制方法,控制机器人完成队形收缩,达到围捕的目的。仿真实验步骤描述如下。
1)由P3-DX判断入侵者的状态,包括速度,入侵方向,入侵位置。
2)作出最优化的围捕策略,使被控Amigo驶向入侵者,形成包围圈并逐步缩小包围圈。
3)被保护者继续前行,另外3个Amigo听从P3-DX指挥,完成围捕。
图6为围捕策略仿真的结果,图中水平轨迹者为多移动机器人系统的被保护者,起点在最下方的Amigo机器人是入侵者。
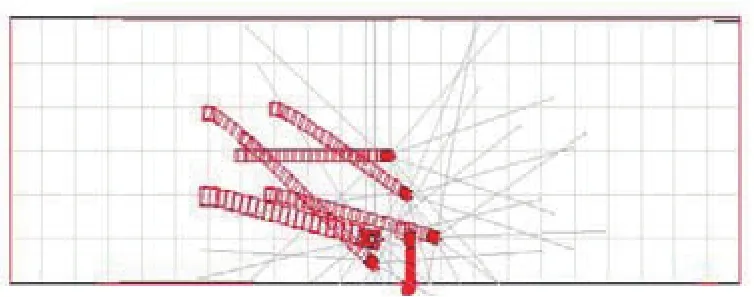
图6 多机器人协同围捕仿真结果图
3 实验
本文的物理实验场景为,在一条长度为10m的走廊里,多机器人系统在走廊的中线两侧的160cm范围内运动,以多机器人安保系统为研究对象,利用P3-DX和Amigo,通过视觉导航及协作在室内环境下按照预定的轨迹安全地达到目的地。限于篇幅,仅给出检测到入侵者以及围捕两种情境下的实验效果图。
图7 显示了在行进过程中P3-DX检测到了入侵者,(a)为视觉监控子系统监控界面,(b)为P3-DX拍摄到的图像,其中小椭圆圈标识为入侵者,大椭圆圈为队形中的一个Amigo。
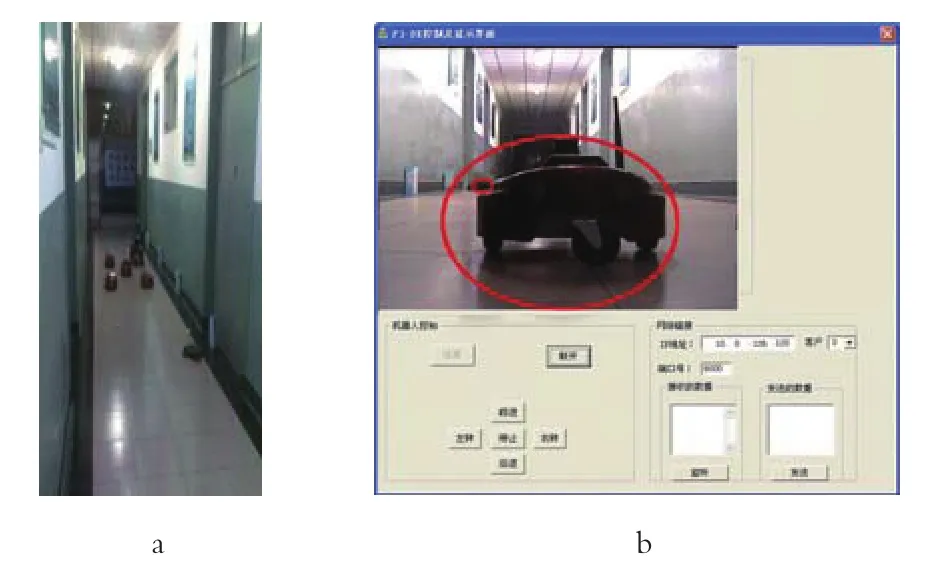
图7 P3-DX检测到入侵者实验结果
图8为实施围捕,当入侵者停止运动时,围捕结束过程的几幅截图。
4 结束语
仿真与物理实验表明,多机器人定位和避障与单机器人相比要复杂些,但是通过采取一定的算法和策略后依然可以较好地实现导航,多机器人编队过程参考圆形队形形成策略提出带有中心的正n边形队形形成策略,对于简单的机器人系统是比较实用的;围捕则采取队形收缩的方案,可以成功完成围捕任务。
下一步的工作将主要集中在多机器人系统通信方式的改进,机器人角色分配的改进,队形控制自适应性可以用相应的算法,以及在处理遮挡情况时可应用EKF等算法预测被遮挡物的运动情况,这样可以实现更精确和快速地实现多机器人的高效协同。

图8 多移动机器人系统围捕实验结果
[1]Bay H, T Tuytelaars, L. Van Gool. Surf: Speeded-up Robust Features[J]. Lecture notes in computer science,2006: 395- 404.
[2]李焕全. 基于“势点”的多移动机器人协调围捕/拦截策略[J], 自动化与仪器, 2007, 5: 1-4.
[3]王巍, 宗光华. 基于“虚拟范围”的多机器人围捕算法[J]. 航空学报, 2007, 28(2): 508-512.
[4]熊举峰, 谭皮剑. 基于虚拟力的群机器人围捕算法[J],计算机工程与应用, 2008, 44(25): 48-51.
[5]李淑琴, 王欢, 李伟, 杨静宇. 基于动态角色的多移动目标围捕问题算法研究[J], 系统仿真学报, 2006, 18(2):362-365.
R&D of multi-robot cooperation system aiming at security
LI Hua-xiong1, WANG Yong-xia2,3, YANG Li2,3
以安保为应用背景,在无线局域网环境中规划并搭建了多机器人系统,围绕基于视觉的多机器人协同技术,重点研究了多机器人系统中的定位,避障及编队等典型问题和相关算法,进而通过协同围捕这类多机器人系统的典型作业,验证了系统、算法和软件的有效性。
安保机器人;多机器人协同;视觉检测;SURF;定位;避障
李华雄(1973-),男,湖南永兴人,工程师,学士,研究方向为制造业信息化,自动控制技术。
TP24
A
1009-0134(2011)4(下)-0017-04
10.3969/j.issn.1009-0134.2011.4(下).06
2011-03-24
国家自然科学基金项目(60772167);天津市高等学校科技发展基金项目(20090704)
猜你喜欢
公民与法治(2022年6期)2022-07-26
北京航空航天大学学报(2022年6期)2022-07-02
时代英语·高一(2021年1期)2021-03-18
儿童故事画报(2018年10期)2018-10-24
传媒评论(2017年9期)2017-12-20
制造技术与机床(2017年3期)2017-06-23
中国总会计师(2016年2期)2016-03-28
少儿科学周刊·少年版(2015年1期)2015-07-07
天文爱好者(2014年2期)2014-08-10
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
