
T-S模糊有记忆非易碎系统H∞控制器设计的LMI方法
2011-05-17 09:09杭阿芳
网络安全与数据管理 2011年5期
杭阿芳
(金陵科技学院,江苏 南京 211169)
H∞控制理论于 20世纪 80年代初由Zames[1]首次提出,即运用小增益定理,设计状态反馈控制器,该控制器在参数不确定和有界扰动的双重影响下,闭环系统仍能保持稳定。H∞控制理论一经提出,很多学者即投入研究[2-3],但均未考虑控制器增益的不确定性(易碎性)。易碎性会造成闭环系统的性能下降,破坏系统的稳定,因而考虑系统的非易碎H∞控制必不可少。近年来,非易碎控制问题的研究有了一定成果[4-6],参考文献[4]通过 LMI方法,设计了满足H∞性能指标的T-S模糊非易碎控制器;参考文献[5]通过Lyapunov函数的稳定分析理论及分散控制理论,设计了大规模的模糊系统在信息交互时的鲁棒非易碎H∞控制器;参考文献[6]研究了参数不确定的T-S模糊中立模型的非易碎H∞控制。对于有记忆控制有一定的研究:参考文献[7]对线性时滞系统进行了有记忆的H∞控制,但未考虑非线性系统和非易碎系统;参考文献 [8]对非线性系统进行了有记忆的H∞控制,但未使用T-S模糊系统,同样未考虑非易碎系统。综上所述,以上的文献均未对记忆性系统、非易碎系统、T-S模糊系统及H∞控制同时进行研究。因此本文对基于T-S模型的有记忆非易碎模糊系统的H∞控制进行研究。
1 问题描述
一类有记忆非易碎T-S模糊系统:

其中,x(t)∈Rn是系统的状态向量,u(t)∈Rm是系统的控制输入向量,ω(t)∈Rr是系统的扰动向量,且ω(t)∈L2[0,∞),y(t)∈Rl是系统的控制输出向量,Ai、B1i、Bi和 Ci是合适维数的常数矩阵,r是模糊规则数。
T-S模糊模型状态反馈控制器的形式如下:

其中,K1i、K2i为控制器增益,ΔK1i、ΔK2i是适维的时变矩阵,表示系统模型中的参数不确定性。τ>0,表示时间滞后常数。
将状态反馈模糊控制器式(2)代入系统方程式(1),则可得到闭环系统:

假设1 参数不确定性定义为加法式[9]

其中 ,D1i、D2i、E1i、E2i为实值常数矩阵 ,F1i(t)、F2i(t)为具有Lebesgue可测元素的未知实变矩阵,并且F1i(t)TF1i(t)≤I,F2i(t)TF2i(t)≤I。式中I为具有适当维数的单位矩阵。
引理1[9]给定正常数ε,D、H是适维的实矩阵,并且FTF≤I,则对任意常数ε>0以及适维的 x、y有:

本文的目的是设计有记忆非易碎状态反馈模糊控制器式(1),使得闭环系统式(3)对于所有的不确定量式(4)鲁棒渐近稳定,而且在零初始条件下满足以下的H∞性能指标。

2 主要结果



为了研究系统的H∞特性,定义Lyapunov泛函为:

式中P、Q1为正定常矩阵。V(x(t))对时间t求导,得:

将闭环系统式(3)代入式(10)式,则:

对任意的ω(t)∈L2[0,∞),ω(t)≠0,在零初始条件下定义性能指标:

对于常量T>0,则有:
根据引理1,可得:

对于式 (14)中所包含的不确定部分运用假设1、引理 1及式(15),则:


其中,Φii=(Ai+BiK1i)TP+P(Ai+BiK1i),


3 算例
对于表述为式(1)和式(2)的T-S模糊系统,考虑两条模糊规则:其中,

取γ=1,利用Matlab中的LMI工具箱进行编程,可求得:ε11=7.965 1,ε22=8.222 1,ε12=8.247 8,


假设系统的初始条件为:x(0)=[-0.2 0.2]T,
且τ=1,F1i(t)=sin(t)I2×2,(i=1,2),F2i(t)=sin(t)I2×2,(i=1,2)
扰动输入ω(t)∈L2[0,∞),ω(t)≠0,假设为:

隶属度函数为:

由Simulink得到算例系统的开环状态响应曲线,如图1所示。加入控制率后,闭环系统的曲线如图2~图3所示。可以看出,系统在有记忆非易碎控制器作用下是渐近稳定的。

图1 开环系统时状态响应

图2 闭环系统状态响应
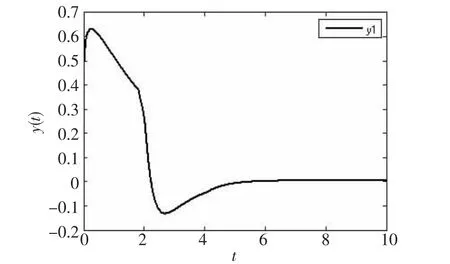
图3 闭环系统控制输出
本文以基于T-S模型的有记忆非易碎模糊系统为对象,讨论了该模糊系统在H∞控制问题中控制器的设计。采用线性矩阵不等式(LMI)的处理方法,导出了H∞状态反馈控制器存在的充分条件。所设计的状态反馈控制器能保证闭环系统渐近稳定并满足设定的H∞控制指标。并用数值算例验证了结论的有效性。
[1]ZAMES G.Feedback and optimal sensitivity:model reference transfer functions, multiplicative semi-norms, and approximate inverses[J].IEEE Trans Automt Control, 1981(2): 301-320.
[2]KHARGONEKAR P P,PETERSEN I R,ZHOU K.Robust stabilization of uncertain linear systems: quadratic stabilizability and H∞control theory[J].IEEE Transactions on Automatic Control, 1990(3): 356-361.
[3]SCHAFT V A J.L2-gain analysis of nonlinear systems and nonlinear state-feedback H∞control[J].IEEE Transactions on Automatic Control, 1992(6): 770-784.
[4]岳菊梅,李俊民.不确定T-S模糊系统鲁棒非脆弱H∞控制[J].系统工程与电子技术,2008(5):909-913.
[5]Liu Xinrui, Zhang Huaguang, Liu Guowei.Robust and non-fragile H∞control for affine fuzzy large-scale systems[J].Intelligent Control and Automation, 2008(27): 6107-6112.
[6]Yang Jun, Zhong Shouming, Xiong Lianglin.A descriptor system approach to non-fragile H∞control for uncertain fuzzy neutral systems[J].Fuzzy Sets and Systems, 2009(4):423-438.
[7]姜偕富,费树岷,冯纯伯,线性时滞系统的记忆与无记忆复合H∞状态反馈控制[J].系统工程理论与实践,2002(6):21-25.
[8]王岩青,赵金华,姜长生.一类非线性不确定时滞系统的记忆与无记忆复合H∞状态反馈控制 [J].电光与控制,2006(2):35-37.
[9]Xu Shengyuan, LAM J, Wang Jianliang, et al.Non-fragile positive realcontrolfor uncertain linearneutraldelay systems[J].Systems&Control Lett, 2004(52):59-74.
猜你喜欢
苏州科技大学学报(工程技术版)(2019年4期)2020-01-04
国际比较文学(中英文)(2019年1期)2019-11-12
电子技术与软件工程(2018年10期)2018-07-16
黑龙江电力(2017年1期)2017-05-17
东方教育(2016年4期)2016-12-14
环境科技(2016年5期)2016-11-10
中国学术期刊文摘(2016年2期)2016-02-13
新乡学院学报(2015年6期)2015-11-06
浙江理工大学学报(自然科学版)(2015年4期)2015-03-01
系统工程学报(2015年2期)2015-02-28
