
基于DSP的光栅信号处理实验平台构建
2011-05-30 00:37黄勇
湖北民族大学学报(自然科学版) 2011年2期
黄 勇
(湖北民族学院 信息工程学院,湖北 恩施 445000)
光栅测距是以光栅传感器输出的莫尔条纹信号为基础,光栅信号处理系统将输出的信号通过细分、辨向和计数处理,从而将位移量转变为数字量,通过数显装置或PC机,可以将测试结果显示出来或实现自动测量.因此,在整个光栅测距系统中,对于光栅信号的处理是整个测试系统的关键.对于光栅信号的处理,传统的方法是采用单片机来处理,存在的主要问题是只能处理输入信号频率较低的信号,也就意味着在处理高频率小位移的光栅信号时响应不够快,不能正确的进行测量.针对上述问题,本文提出了构建一种基于DSP处理器的光栅信号处理实验平台,采用TI公司5000系列DSP处理器TMS320VC5402来实现对光栅信号的采集、滤波、细分、辨向和频谱分析,该实验平台具有多通道、智能化程度高的特点.
1 光栅传感器位移测量基本原理

图1 光栅传感器输出信号
本实验平台中采用的光栅传感器输出两路正交信号,其中一路为正弦信号,另外一路为余弦信号,图1给出了相差90°的两路信号,其中u1(x)与u2(x)可以表示为:

图2 光栅传感器位移测量模型
式中:u1(x)代表光栅传感器输出的一路信号,U0代表信号中的直流分量,Um代表信号的幅度,x代表光栅中指示光栅与标尺光栅的发生的相对位移,w代表光栅的栅距.
光栅测量系统工作时,当光栅输出信号变化一个周期时,则发生的位移量为一个栅距w.通过计算输出光栅信号的周期数,即可以测算出实际的位移量,从而实现测距[1].一般情况下,如果仅仅通过计算输出信号的周期数来进行位移测量,则系统的分辨率仅为光栅栅距w,如采用100线/mm的光栅,其分辨率也只有10 μm.因此,为了得到比光栅栅距更小的位移量,必须对光栅输出信号进行细分,具体办法就是在一个信号周期给出N个计数脉冲,这样系统的分辨率就提高了N倍.光栅位移测量模型如图2所示.
光栅每移动栅距w,则计数值为N,当实际计数值为k,则位移量x为:x=wk/N.
2 光栅信号的谱分析
由前述的光栅传感器输出的信号为周期信号,输出信号u(x)可以展开成傅里叶级数为:
对光栅传感器输出的信号采用傅里叶分析法进行频谱分析,可以了解信号在整个时域内的情况,据此可以判断出光栅传感器的测头是否受到撞击、摩擦等异常情况,从而为数据的分析提供直接依据[2-3].利用示波器对光栅传感器输出的信号进行频谱分析,图3为正常情况下光栅传感器输出信号的频谱,图4为异常情况下光栅传感器输出信号的频谱.
通过图3、4可以得出,在光栅传感器位移测量系统中分析信号的频谱是有必要的,在本文所构建的光栅信号处理实验平台中,利用TMS320VC5402来实现该功能.

图3 正常情况下光栅传感器输出信号的频谱 图4 异常情况下光栅传感器输出信号的频谱
3 实验平台硬件结构
整个实验平台的硬件结构如图5所示,主要由TI公司的16位定点DSP处理器TMS320VC5402、A/D转换器MAX115、TI公司的异步通信芯片及其它的外围电路构成,其中TMS320VC5402是整个实验平台的核心部分.实验平台工作过程为:当DSP处理器上电后,完成自身的初始化,然后对A/D转换器MAX115进行设定.当DSP检测到光栅传感器输出的零位触发信号后,对计数器清零,同时,DSP启动MAX115对光栅传感器输出的两路信号进行快速同步采集,A/D转换结束后,DSP读取转换数据并进行细分、辨向、计数处理,测量的结果通过TL16C750芯片、并经过MAX232传送的PC机显示[4].
3.1 TMS320VC5402芯片简介
TMS320VC5402芯片是TI公司推出的高性能、低功耗的16位定点DSP处理器,工作电源3.3 V,内核电源1.8 V,操作速度达到100 MIPS,具有先进的多总线结构(1条程序总线、3条数据总线和4条地址总线),具有17bit*17bit的并行乘法器与40位专用加法器,带有4K*16bit的ROM和16K*16bit的DARAM.其片内外设主要包括:内置可编程等待状态发生器、锁相环(PLL)时钟发生器、2个多通道缓冲串行口、1个8位并行与外部处理器通信的HPI口、2个16位定时器以及6通道DMA控制器[5-6].芯片内部结构如图6所示.
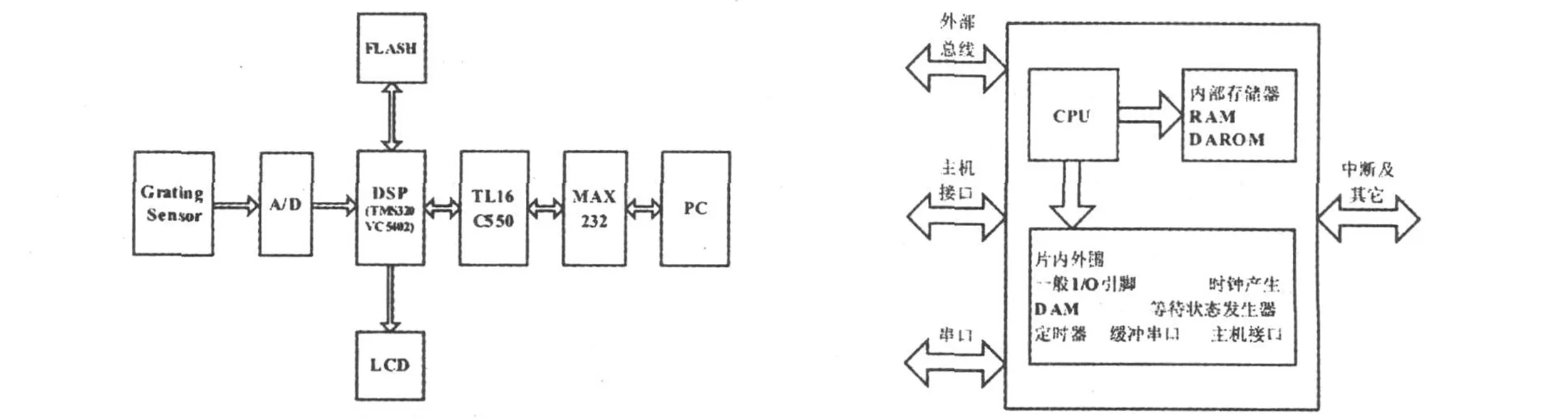
图5 实验平台系统框图 图6 TMS320VC5402内部结构框图

图7 电源电路

图8 A/D转换电路
3.2 电源电路
本文所构建的光栅信号处理平台需要考虑所有芯片的供电情况,设计时主要从系统电压要求、电流要求和上电次序等三个方面考虑.对于TMS320VC5402而言,其GPIO引脚为3.3 V,CPU内核电压是1.8 V,结合到本系统其它芯片的供电情况,电源电路要求提供三种电压:5、3.3和1.8 V.因此电源电路设计需要采用电压转换芯片,将5 V电压转换成3.3和1.8 V,以供TMS320VC5402芯片使用.基于上述要求,本设计中选用电压转换芯片TPS767D301[7],将5 V变为3.3 V和1.8 V,电路图如图7所示.
3.3 A/D转换电路
为了提高精度、降低整个实验平台的成本,对于光栅信号采集中的A/D芯片选用的是MAX115[8],具有电路连接简单、接口方便的特点,该芯片在使用双通道情况下采样速率为218ksps,可以较好的满足设计要求.A/D转换电路图如图8所示.
3.4 异步通信电路
TMS320VC5402没有专门的UART(通用异步接收/发送装置)接口,只有2个McBSP(多通道缓冲串口),要实现异步串行通信,大多数情况下都是用软件对TMS320VC5402的McBSP口编程来模拟的,这种方法软件编程相对复杂,且占用很大系统资源.
在本设计中,采用TI公司生产的异步通信芯片TL16C750[9]来实现TMS320VC5402与PC机的连接通信,然后通过MAX232完成电平转换,最后将转换结果送到PC机以实现DSP与PC的异步通信,该方法避免了用McBSP来模拟串口的缺点.DSP与PC通过TL16C750和MAX232进行串口通信的电路图如图9所示

图9 串口通信电路

图13 串口通信流程图
4 软件设计
光栅信号处理实验平台软件主要包括主程序、细分辨向子程序、频谱分析子程序、串口通信程序等4个部分.
主程序流程图如图10所示,主要完成对各个硬件模块的初始化,相关子程序的调用;细分辨向子程序流程图如图11所示,主要是通过A/D转换结果来分析和判断当前值处于哪个区间位置,以及指示光栅运动的方向;频谱分析子程序流程图如图12所示,主要是对A/D转换结果进行频谱分析,检测光栅传感器输出信号是否有异常;串口通信子程序流程图如图13所示,主要是设置串行通信的数据格式,向PC机发送测试数据.

图10 主程序流程图 图11 细分辨向子程序流程图 图12 频谱分析子程序流程图
5 结语
采用DSP处理器的光栅信号处理实验平台,实现了对光栅信号的细分、辨向、频谱分析等复杂处理,克服了传统处理方法中存在的精度不高、实时性不强的缺点,该平台适合处理光栅输出信号频率较高的情况.经过测试,实验平台的分辨率为0.1 μm、系统精度±1 μm,应用范围较广.
参考文献:
[1]张善锺.计量光栅技术[M].北京:机械工业出版社,1984:5-12.
[2]王远干,喻洪麟,巴军.基于小波二维重建的强噪声光栅信号奇异点检测[J].压电与声光,2009,31(3):330-333.
[3]Yang W X, Hull J B, Seymour M D. Detecting the singularities in engineering signals[J].Journal of Materials Processing Technology,2006,175(1/3):439-445.
[4]刘利平,黄勇,廖红华.基于PCI总线的光栅传感器位移测量系统设计与实现[J].湖北民族学院学报:自然科学版,2010,28(1):90-92.
[5]乔瑞萍,崔涛,张芳娟.TMS320C54xDSP原理及应用[M].西安:西安电子科技大学出版社,2005:11-30.
[6]梁晓雯,裴小平,李玉虎.TMS320C54x系列DSP的CPU与外设[M].北京:清华大学出版社,2006:1-7.
[7]张云安,减志华,王晓峰.双路输出低压差电压调整器TPS767D301及其应用[J].电子元器件应用,2006,8(7):112-114.
[8]王永生,金书海.磁悬吸取轴承控制器中MAX115与DSP的接口设计[J].电子设计应用,2004,11(3):118-120.
[9]刘轶德,程韧.TL16C750在异步串行通信中的应用[J].电子科技,2005,19(1):56-59.
猜你喜欢
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
浙江共产党员(2014年12期)2014-07-10
中国新技术新产品(2014年3期)2014-03-24
物理与工程(2014年4期)2014-02-27
天津医药(2012年3期)2012-11-28
