
基于模糊积分的潜隐性故障状态转移过程分析
2011-06-11 03:35黄景德郝学良
大连交通大学学报 2011年6期
黄景德,郝学良
(海军大连舰艇学院 舰炮火控教研室,辽宁 大连 116028)
0 引言
潜在故障状态具有故障信号微弱,故障信号表征不明显,故障特征信息少,不确定性因素多等特点,而传统的故障诊断方法主要面向故障机理明确或者具有大量历史故障信息的显形故障,对于失效信息少或者无失效信息的潜在故障诊断来说,难以满足诊断预测的要求,主要存在着故障定位困难,潜伏时间难以确定等问题[1].模糊理论用精确的理论方法解决了经典理论所不能解决的、非确定性语义及模糊概念的问题,同时还能克服由于预测过程本身的不确定性、不精确性以及噪声等所带来的困难.目前主要有三种基本预测思路:一是基于模糊关系及合成算法的预测;二是基于模糊知识处理技术的预测;三是基于模糊聚类算法的预测.模糊预测在处理复杂系统的时滞、时变及非线性方面,显示出它的优越性.如模糊集理论可以很好地描述不确定现象,模糊积分法以模糊集理论为基础,考虑到了分类器的可靠性问题,避免了对先验信息的讨论,也无需做各元件初级诊断结论独立性假设,可以更好地表达和处理系统中的不确定性问题[2].因此,本文在多状态可靠性分析的基础上,运用马尔可夫过程对多状态系统的状态转移过程进行了精确描述,采用模糊积分进一步对HMM模型输出的诊断结果进行信息融合,以提高复杂装备的故障诊断效率,满足装备技术保障的需要.
1 潜在故障状态评估
1.1 潜在故障概念
工程实践中,装备往往存在一种处于故障和完好的中间状态,此时装备仍然可以继续使用,但是如果不采取适当的预防措施,就会促使功能故障的提前发生.潜在故障发展到功能故障过程如图1所示,A代表功能退化开始点;P代表潜在故障发现点;F代表功能故障发生点;T代表继续使用时间.图1说明潜在故障状态位于正常状态和功能故障之间,具有一定的潜伏时间T.
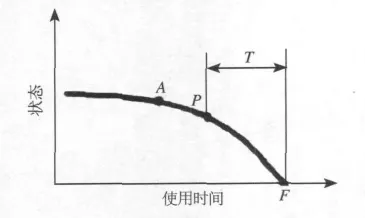
图1 潜在故障示意图
对于电子装备,潜在故障状态概率可以理解为系统处于非失效水平条件下单元处于中介状态的条件概率.因为在这种情况下,系统尚未表现出失效状态,但是单元可能出现潜在故障,这时,及时确定出现潜在故障的单元,对装备的维护保养和战备完好性的发挥具有重要意义.在概率统计中,贝叶斯公式是求取条件概率的绝好方法,因此,建立基于贝叶斯网络的可靠性评估模型如式(1).

式中,AM表示A单元处于潜在故障状态,SF表示系统处于非失效状态.
1.2 基于Markov过程的系统状态转移
根据上述对潜在故障的定义,可以把系统的状态分为三个,分别为:安全状态(S0)、潜在故障状态(S1)、功能故障状态(S2).系统在各个时刻影响故障的因素都错综复杂,其中包括使用强度、使用时间、环境因子、随机失效因素等,因此,可以认为系统下一时刻所处的状态只与当前时刻所处的状态有关,而与过去的时刻无关,它满足马尔可夫性,是一个马尔可夫链的随机过程[3],如图2所示.
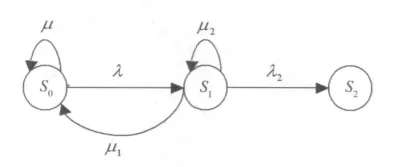
图2 状态转移示意图
为进一步进行故障模式识别,将S2状态再细化为具体的故障模式状态,假设该系统具有多种故障模式,若想求出相对于某故障模式的故障到达时间,可通过求解马尔柯夫过程将概率问题转换为时间问题.到达时间最早的即可理解为最可能出现的故障模式,故障模式的到达时间即是图1中的潜在故障的潜伏时间T.设系统有 n种状态模式,记作,M={M1,M2,…,Mn},当系统处在潜在故障状态时,对每一种故障模式转移的概率分别为 P1,P2,…,Pn.
求解针对潜在故障状态转移到故障模式Mi(i=1,2,…,n)状态下的连续型 Markov状态转移过程,如图3所示,f1,f2,…,fn为系统由潜在故障状态转移到各功能故障模式的失效概率.
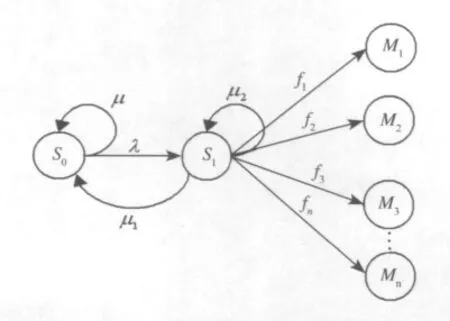
图3 潜在故障状态与故障模式关系
2 基于模糊积分的融合诊断策略
2.1 模糊积分模型
首先根据Sugeno模糊测度的概念,定义两个基本概念[4].
定义1 模糊测度.设(X,Ω)是模糊可测空间,则满足以下3个条件的映射g(·):Ω→[0,1]称为Ω上的模糊测度.
(1)g(φ)=0,g(X)=1;
(2)若 A⊆ B,g(A)≤ g(B);
同时,如果所有的A,B⊂X,A∩B=Φ,λ> -1,g(·)还满足式(1):

则称g(·)为gλ(·)的模糊测度.显然当 λ =0时,g(·)测度满足可加性,是概率测度.
定义2 模糊积分.设(X,Ω)是模糊可测空间,h:X→[0,1]是一个可测函数,则在A⊆X的范围内的函数h(x)相对于模糊测度g的模糊积分为

式中,F∂={X:h(x)≥∂}.
假设 X={x1,x2,...,xn}是一个有限集合,且h(x1)≥h(x2)≥…≥h(xn),则模糊积分值为

式中,Ai={x1,x2,...,xi}.
设模糊密度 gi={g(xi)},当g(·)为gλ(·)的模糊测度时,g(Ai)可由下式得到:
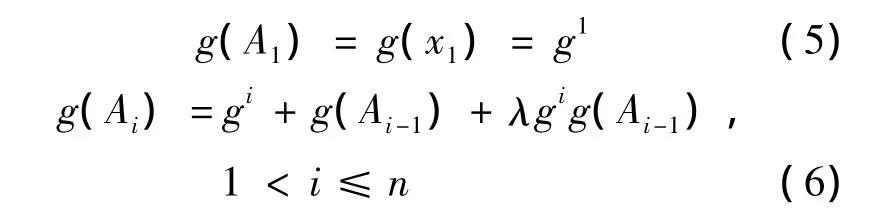
λ通过求解下面的方程得到:

对于一个固定的模糊密度集合{gi},0<gi<1,有且仅有一个λ∈(-1,+∞)满足方程(6),当且仅当时,有 λ =0.
2.2 多分类器融合模型分析
目前使用模糊积分来组合多个分类器以获取较高的分类精度成为一个研究热点.模糊测度在多分类器融合系统中起着重要的作用,对融合系统的性能有很大的影响.模糊测度定义的好坏直接影响着系统的分类精度、稳健性等方面的性能.
多个分类器由模糊积分对融合结果进行冲突消解形成评估结论.分类器主要有规则、故障树和案例所建立.这些分类器综合不同的知识表示方式和推理机制,通过竞争和合作来共同完成融合任务.多分类器融合示意图如图4所示.

图4 多分类器融合示意图
每一个分类器都产生一个求解方案,构成结论集 {uAg1,uAg2,…,uAgn}.设对每个结论可以通过M 个标准衡量,{c1,c2,…,cM},各自的重要程度由权重αi(i=1,…,M)来显示.
uAgj对ci的隶属度记为uci(uAgj)∈[0,1],可以简记为uij.对 ci和 αi(i=1,…,M),有模糊集:
则最佳方案可以由

3 基于模糊积分的状态求解
3.1 模糊密度gi确定方法
为了表达具体信息的重要程度,我们首先定义一个适当的模糊密度gi[5].本文采用通过加权平均的方法来动态确定模糊密度,假设P=(p0,p1,p2)是HMM模型第j种故障模式产生概率输出值,则gi可以由下面的算法确定.

式中,λj的大小代表各因素不同权重,由历史经验和专家知识进行确定.
3.2 数据融合过程
有了模糊密度的确定方法之后,根据可测函数h(·),就可以计算出模糊积分值.在目标识别的时间域融合中,将HMM诊断模型的输出作为可测函数h(·),这样对于不同的故障模式和故障样本就可以得到不同的可测函数,利用模糊积分的方法可以把各种故障模式的输出结果综合起来,如果把论域X表示为对象的特征集,构造模糊测度所需的模糊密度gi表示为对象每个特征的权重,h(·)表示为对象在特征上的信任度,则模糊积分值实际上就表明了对象每个特征的信任程度和各特征的权重的相容程度,模糊积分值越大说明对象同特征之间的关系越接近.因此,利用模糊积分来融合多源信息,待识别的目标就是系统的状态概率分布.
在模糊密度的确定的基础上,由式(7)计算λ值;由式(5)、式(6)计算模糊测度g(Ai);由式(4)计算最终的模糊积分值,所得模糊积分值即是进一步融合后的系统状态.数据融合过程如图5所示.

图5 数据融合流程图
4 仿真实验
为验证上述理论方法在提高电子装备故障诊断识别率方面的有效性,以某火控设备单元控制模块为例.针对其主要的故障模式进行加速实验获取实验样本数据,利用构建的HMM模型对获得的样本数据进行处理,诊断结果如表1所示,继而利用上述模糊积分数据融合对诊断结果进行融合计算,输出结果如表2所示.

表1 HMM诊断模型输出结果

表2 模糊积分结果
5 结论
本文提出了将HMM模型和模糊积分相结合用于装备的故障诊断,在多状态可靠性分析的基础上对潜在故障概念进行了进一步的明确,对多状态系统的潜在故障模式进行了分析,并利用Markov过程对系统状态转移进行了数学上的描述,针对具体潜在故障模式,并通过实验证明了该方法能够有效地提高装备故障诊断的识别率,可以为装备技术保障开展视情维修和基于可靠性的维修提供服务,为潜在故障诊断提供了新思路和新方法.
[1]梁继民,杨万海.决策融合的模糊积分方法[J].西安电子科技大学学报,1998,25(2):250-253.
[2]钟晓龙,陈刚.20 000 m3/h空分装备主换热器泄漏分析及处理[J].深冷技术,2006(1):47-50.
[3]李素文.模糊积分在多分类融合中的应用[D].保定:河北大学,2006.
[4]梁继民,杨万海.决策融合的模糊积分方法[J].西安电子科技大学学报,1998,5(2):250-253.
[5]郭创新,朱传柏,曹一家,等.电力系统故障诊断的研究现状与发展趋势[J].电力系统自动化,2006,30(8):98-103.
[6]曾胜斌,林少芬,江小霞.基于马尔可夫过程的舵机控制系统可靠性分析[J].船海工程,2009(8):59-62.
猜你喜欢
数学物理学报(2022年3期)2022-05-25
数学物理学报(2022年2期)2022-04-26
一重技术(2021年5期)2022-01-18
数学物理学报(2020年4期)2020-09-07
数学年刊A辑(中文版)(2020年2期)2020-07-25
电子制作(2018年10期)2018-08-04
计算机应用(2017年4期)2017-06-27
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
