
基于SPI接口的无线网卡设备驱动设计
2011-06-12 03:19盛李立王春丽
武汉工程大学学报 2011年6期
盛李立,王 忠,王春丽,王 浩
(1.武汉工程大学计算机科学与工程学院,湖北 武汉 430074;2.武汉大学电子信息学院,湖北 武汉 430072 )
0 引 言
最近几年,在国内外医疗市场上,WIFI医疗设备的应用正以前所未有的速度增长.众所周知,相比于传统的有线网络,无线局域网的应用价值体现在:可移动性、布线容易、组网灵活和成本优势,另外,无线网络通信范围不受环境条件的限制.本文设计了一套基于Marvell 88W8686无线网卡芯片的无线通信系统,通过对SPI无线网卡的Linux设备驱动的深入理解和分析,成功地移植在S3C2440 ARM处理器上[2].实现了嵌入式系统的无线局域网接入.利用该平台,可以进一步设计完善医用心电监护仪和手持数据采集系统的无线数据传输,使得控制人员能够远离数据采集现场,而通过远程终端来控制现场数据和各种控制信号,获得较好的便利性,同时较好地解决了安全性问题.
1 硬件系统构成
1.1 Marvell 88W8686无线网卡芯片介绍
无线网卡是无线局域网(WLAN)的重要组成部分,WLAN的物理层及MAC层是用无线网卡的硬件及其软件完成的,而LLC层以上各层均由计算机软件来实现.WLAN包括进行通信的网络接口卡(简称无线网卡)和接入点/桥接器(AP/网桥).其中,无线网卡提供了最终用户设备(手持设备)与接入点/桥接器之间的接口[6].
Marvell 88W8686无线网卡芯片集成了一片ARM兼容DECPU,包含SDIO和SPI以确保与多种主机系统互用DE高速串行主机接口,以及先进DE802.11 a/b/g RF收发器,完全与蜂窝网络相容.该芯片兼容多种通信标准如L3,TCP/IP,UMA和IMS.
1.2 系统构成
主控制器采用S3C2440[5],主频高达400~533 MHz,基于ARM920T内核(16/32-bit RISC CPU)的高性能CPU,独立的16 kB指令和16 kB数据cache,MMU虚拟内存管理单元,使得程序运行以及数据存储更加高效,并可以支持Wince,Linux等多种主流操作系统,其集成了以下片上外设:LCD控制器(支持STN和TFT)、SPI控制器、SDIO控制器、USB控制器、NAND FLASH Controller等.
操作系统采用Linux 2.6.28;Bootloader采用vivi;根文件系统采用ramdisk.系统启动后挂载yaffs2文件系统.系统的硬件平台采用广州友善之臂公司的mini 2440开发板,外围接口包括1个SPI接口和一根IO外部中断线.硬件电路:mini 2440开发板通过SPI0连接Marvell 88W8686;mini 2440开发板con4接口图如图1所示.

图1 开发板mini 2440接口con4图
SPI接口使用SPI0,中断使用EINT1,复位使用nRESET,唤醒使用GPB0,电源使用VDD33V,地使用GND.
无线路由器采用武汉大学网络与信息技术实验室开发的WHU-VANET,支持802.11 a/b/g标准、TCP协议和TFTP协议.
整个系统硬件框图如图2所示,图3为Marvell 88W8686硬件原理图.

图2 系统硬件框图
Fig 2 System Hardware Diagram

图3 Marvell88W8686硬件原理图
2 Marvell 88W8686无线网卡芯片驱动
Marvell 88W8686无线网卡芯片驱动实现的基本步骤如下:
·基于mini 2440开发板的Linux 2.6.28操作系统的移植;
·编写基于mini 2440开发板的SPI接口驱动;
·编写Marvell 88W8686无线网卡芯片的驱动程序;
·联合WHU-VANET无线路由器进行调试和性能测试.
2.1 Linux 2.6.28操作系统的移植
2.1.1 下载安装交叉编译环境 在本文中,使用的交叉编译器是arm-linux-gcc 4.3.2,其具体下载地址请参考文献[7],下载后,进行解压安装到根目录.
2.1.2 获取Linux内核源代码 有很多方式可以获取Linux内核源代码,在本文中,是直接在Fedora9平台上互联网,直接在命令行通过wget命令获取到最原汁原味的Linux-2.6.28的源代码[8],然后进行解压,接着针对mini 2440开发板进行对解压后的内核进行以下修改:
① 指定交叉编译变量
本文中,移植的目的是让Linux-2.6.28.9可以在mini 2440上运行.
首先,要使得Linux-2.6.28.9的缺省目标平台成为ARM的平台.修改总目录下的Makefile中的ARCH指定平台为ARM_CROSS_COMPILE为解压安装后的arm-linux-gcc 4.3.2开发工具[2].
② 修改机器码
首先很关键的一点,内核在启动时,是通过bootloader传入的机器码(MACH_TYPE)确定应启动哪种目标平台的,友善之臂已经为mini 2440申请了自己的机器码为1999,故需要修改ARCH/arm/tools/mach_types中的ARCH_S3C2440的机器码362为1999,与supervivi传入的机器码参数一致即可!
③ 修改时钟源频率
修改arch/arm/mach-s3c2440/mach-smdk2 440.c文件下的时钟源频率,因为mini2440开发板上的晶振是12 MHz,故需要修改原SMDK2 440目标板上的晶振16.934 4 MHz为12 MHz.
④ 修改Nand Flash分区
系统默认的分区不是所需的,所以要自己修改,除此之外,还有Nand Flash的结构信息需要增加填写,以便能够适合系统自带的Nand Flash驱动接口.
⑤ 修改DM9000驱动程序
参考Linux-2.6.18内核中的dm9000.c源文件来修改Linux-2.6.28中的DM9000的驱动程序,主要是在dm9000.c的dm9000_init()函数中添加dm9000寄存器初始化操作.
⑥ 获取yaffs2源代码
在命令行输入 #git clone git://www.aleph1.co.uk/yaffs2,可以下载到最新的yaffs2源代码.然后解压为内核打上yaffs2补丁.在命令行输入 #./patch-ker.sh c /opt/mini 2 440/linux-2.6.28.9 成功的为内核打上补丁.
⑦ 编译测试
在Linux源代码根目录下执行
#make s3c2410_defconfig
对内核进行默认配置,然后在命令行输入:
#make menuconfig
为内核添加对DM9000的支持,SPI驱动的支持,同时添加上对yaffs2文件系统和无线扩展工具的支持.
⑧ 烧写到开发板运行测试
在命令行输入:#make zImage
生成内核映像文件,然后通过wget下载到mini 2440开发板上运行.
2.2 SPI接口驱动编写
从marvell官方网站下载SPI接口的驱动程序src_gspi8686.tar.gz,此驱动程序是基于PXA270的,所以需要移植到mini 2440平台上,主要有以下工作要做:
1)对src_gspi8686里io文件中的gspi.c和gspi.h这两个文件修改,针对各个具体函数,按照s3c2440 SPI的时序来编写SPI驱动,在本设计中,具体需要修改的部分如下:
① 首先定义SPI字符设备的在内核中的主设备号,代码如下:
static int major = 240;
② 内核提供了操作字符设备的函数接口,由file_operations结构封装[4].
驱动程序就是要实现这些只有函数名,而无函数体的函数接口,以便响应用户的系统调用,在这个结构中的每一个字段都必须指向驱动程序中实现特定操作的函数,对于不支持的操作,对应的字段可置为NULL值.针对本设计中的SPI字符设备驱动,需要实现的函数接口是:gspihost_open(),gspihost_release(),其他函数接口置空.
·gspihost_open()函数完成以下操作:调用try_module_get()函数来获得SPI驱动模块,同时将网卡的私有数据域置空.
·gspihost_release()函数完成以下操作:调用module_put()函数来释放SPI驱动模块,同时将网卡的私有数据域置空.
③ 完成读写数据和寄存器操作,具体需要实现的函数如下:
· gspi_write_data_direct()根据SPI的写时序,首先使能mini 2440的SPI0时钟,然后片选中Marvell 88W8686,根据Marvell 88W8686的数据手册,写操作的地址偏移量是0x8000,然后将具体的数据通过SPI的MOSI管脚把数据发送给Marvell 88W8686芯片.至此实现了gspi_write_data_direct()的函数体.
·gspi_write_reg()和gspi_write_data()函数的实现,均是调用gspi_write_data_direct()函数,只是传递的参数有差别.
·gspi_read_data_direct()根据SPI的读时序,首先使能SPI0时钟,然后片选中Marvell 88W8686,根据Marvell 88W8686的数据手册,将请求的操作的地址偏移量通过mini 2440的SPI0的MOSI发送给Marvell 88W8686芯片,然后Marvell 88W8686芯片将具体地址的数据通过SPI0的MISO管脚把数据上传给主机mini 2440.至此实现了gspi_read_data_direct()的函数体.
·gspi_read_reg()和gspi_read_data()函数的实现,均是调用gspi_read_data_direct()函数,只是传递的参数有差别.
④ GSPI模块在使用中断前要先请求一个中断通道(或者中断请求IRQ),然后在使用后释放该中断.在本系统中,mini 2440的SPI0使用的是轮询发送中断接收,中断接收时,使用的是外部中断线1,通过调用request_irq()函数来完成SPI0中断的注册.与此相反的是调用gspi_unregister_irq()函数来注销中断.
⑤ 实现gspihost_init_hw()函数,此函数主要完成以下操作:首先初始化mini 2440的SPI0的管脚;片选管脚初始化;设置SPI0的速率,模式,格式等;完成外部中断线1管脚即EINT1的初始化.
⑥ 实现gspihost_module_init()函数, 此函数主要完成以下操作:调用ioremap()函数将SPI0和外部中断线EINT1所使用的GPIO的地址空间映射到内核的虚拟地址空间,便于系统访问;同时调用register_chrdev()来向内核注册此SPI字符设备.
至此,基本上完成了SPI字符设备驱动程序的设计,待编译调试无误后既可下载安装此SPI模块到内核中去运行.
2)修改Makefile编译修改过的代码,编译生成gspi.ko和gspi8xxx.ko.
2.3 Marvell 88W8686驱动程序分析与理解
Marvell 88W8686驱动程序调用流程如图4所示.

图4 Marvell驱动程序流程图
在图4中:系统首先调用Wlan_init_module()函数初始化gspi8xxx.ko模块,然后调用Wlan_add_card()函数在系统内核中增加一个网卡设备,同时分配wlan_priv结构和初始化这个设备,再调用Alloc_etherdev()函数分配一个以太网设备并且注册此以太网设备,再调用inti_waitqueue_head()函数初始化等待队列,同时调用wlan_create_thread()函数来创建wlan_service_main_thread主线程,并且调用configureThreadPriority()函数来配置该线程的优先级.其实wlan_service_main_thread主线程相当于一个中断服务程序,该线程处理由固件产生的接收事件或者接收的数据,并且发送从内核来的数据.接着调用sbi_register_dev()来注册此设备,根据网卡和中断获得的数据来填充此设备的私有数据结构.调用sbi_get_cis_info()函数来获得CIS表,接着调用wlan_init_fw()函数来初始化固件,并且调用register_netdev()函数来注册此网络设备.至此,整个模块的初始化流程到此结束.然后内核调用schedule()函数来进行进程调度,当wlan驱动有中断时,就会进入wlan_service_main_thread()函数进行判断,并且调用相应的函数进行处理.
3 编译与ping测试
(1)将编译生成的gspi.ko模块,Marvell 88W8686无线网卡驱动模块gspi8xxx.ko,helper.bin及gspi.bin下载到ARM板中;
(2)修改文件执行权限,在命令行输入:chmod +x *;
(3) 加载spi接口驱动 gspi.ko,在命令行输入:insmod gspi.ko;
(4)加载网卡设备驱动及上载芯片固件,在命令行输入:insmod gspi8xxx.ko helper_name=./helper.bin fw_name=./gspi.bin.
(5)加载驱动完成后,查看网卡信息,然后扫描可用的无线网络,再连接到特定的AP,最终配置以太网信息并ping 测试.如图5所示:ping测试成功,说明系统运行正常,WLAN通信正常.
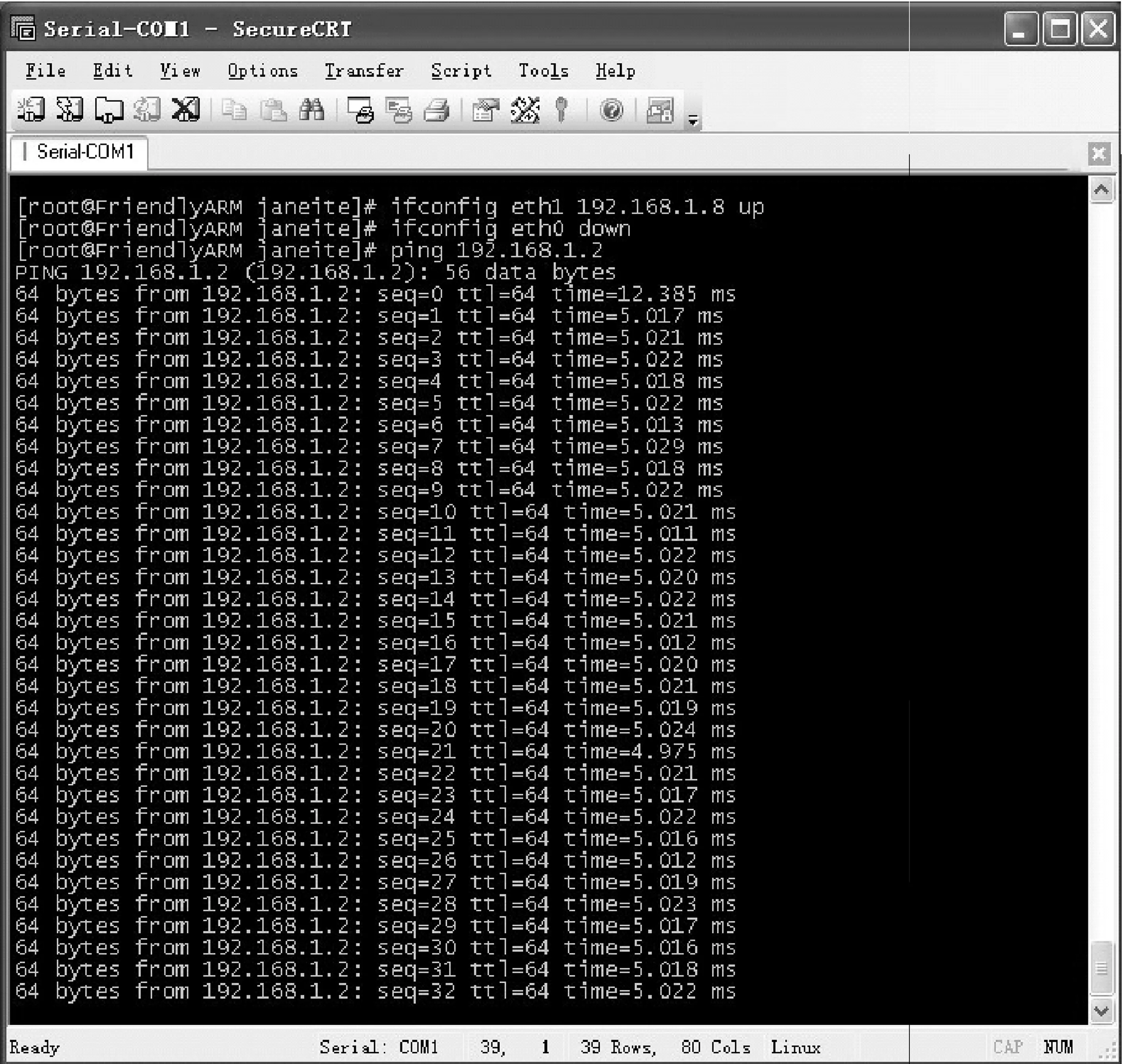
图5 ping结果图
4 测试结果与分析
4.1 测试方法
使用UDP方式SOCKET发送数据,模拟生命监护仪发送过程,数据发送量为8 kBytes/s.工作方式采用:连接AP、发送睡眠时缓冲数据、发送唤醒时数据、断开连接、睡眠循环的工作方式,以达到低功耗的要求.
4.2 测试结果
4.2.1实测数据 进各阶段的占用时间通过linux系统自带时间函数求得,单位为1 s,精确度为0.01 s,测试结果如图6所示.

图6 测试结果
由图6可知,各阶段所耗时间为:
a)连接时间:1.60 s
b)休眠1 s时缓存的8 kBytes发送时间:0.01 s
c)工作时16 kBytes数据(假设为2 s内的数据量)发送时间:0.01 s
d)断开连接时间:0.08 s
e)休眠时间:1.04 s
4.2.2 技术指标计算 根据以上测试时间及数据量等数据,可以计算以下指标:
① 工作平均功耗:3.3 V*(170 mA*(1.60 s+0.01 s+0.01 s+0.08 s)+1.8 mA*1.04 s)/(1.60 s+0.01 s+0.01 s+0.08 s+1.04 s)=3.3 V*63.35 mA=209.01 mW
② 休眠功耗:3.3 V*1.8mA=5.94 mW
③ 平均数据量:(8 kBytes+16 kBytes)/(1.60 s+0.01 s+0.01 s+0.08 s+1.04 s)=8.76 kBytes/s
④ 最大传输延时:1.04 s+1.60 s+0.01 s=2.65 s
⑤ 发射功率最大是:18 dbm
⑥ 最大切换时间为,断开连接时间加上连接AP时间:0.08 s+1.60 s=1.68 s
通过以上计算,所有数据均满足生命监护仪和实际使用场合所规定的无线网卡技术指标.
5 结 语
WIFI医疗是一个潜力巨大的市场,快速发展的市场,将有力地推动WIFI医疗设备的开发.本文从工程应用的角度出发,研究并移植了Linux下的Marvell 88W8686无线网卡芯片的设备驱动,以此为基础可以构建诸如便携式的心电监护仪的无线传输系统,打破传统的床旁监测的单一模式,为各级医疗机构提高医疗服务水平提供了良好的平台.
参考文献:
[1] 王标,郭敏,单保慈.基于ARM的无线网卡设备驱动设计[J].现代电子技术,2009(7):101-103.
[2] 孙天泽,袁文菊.嵌入式设计及Linux驱动开发指南——基于ARM9处理器[M].北京:电子工业出版社,2005:28-35,115-125.
[3] 刘峥嵘.嵌入式Linux应用开发详解[M].北京:机械工业出版社,2005:22-35.
[4] [美]Corbet J.Linux设备驱动程序[M].3版.北京:中国电力出版社,2006.
[5] Samsung.S3C2440A 32-BIT CMOS MICROCON-TROLLER USER’S MANUAL Revision 1[EB/OL].http://www.mcuoL.com/dounLoad/254/2179.htm,2004.
[6] Marvell 88W8686 Data Sheet.Integrated MAC/Baseband/RF Low Power SoC IEEE802.11a/g/b[EB/OL].http://www.datasheet ardhive.com /88%20Mawell-datacheet.htul,2007.
[7] Aam-linux-gcc cross-compilation sites[EB/OL].http://www.codesourcery.com/sgpp/lite/arm/portal/release,644.
[8] Linux-2.6.28 Sourece sites[EB/OL].http://www.kernel.org/pub/linux/kernel/v2.6/linux-2.6.28.9.tar.gz.
猜你喜欢
舰船电子工程(2020年5期)2020-07-09
网络安全和信息化(2020年3期)2020-04-20
电脑报(2019年10期)2019-09-10
网络安全和信息化(2019年1期)2019-02-15
电子制作(2018年17期)2018-09-28
电子制作(2017年22期)2017-02-02
物联网技术(2015年11期)2015-11-26
电脑爱好者(2015年15期)2015-09-10
网络与信息(2009年7期)2009-07-11
现代电子技术(2009年8期)2009-06-25
