升降机试验台无线测控系统的实现
2011-06-14 01:37戴亚文李小强
无线电工程 2011年5期
李 鹏,戴亚文,李小强
(武汉理工大学理学院,湖北武汉430070)
0 引言
研制导轨式残障人运送升降机(以下简称“升降机”)综合性能试验台是国家科技部支撑计划“室内移动辅具关键技术与目标产品研发”课题中的一项任务,其目的是为轨道式残障人运送升降机的研制、检测和验收创造条件。
目前测试平台所采用的数据传输方案大致可分为有线传输和无线传输2种。有线传输的方案由于导线容易磨损和布线难等问题并不适用于疲劳性测试项目,而现有的无线技术已经完全能够满足系统的传输速度需要。因此,系统选用无线传输的方案并针对无线方案所主要面临的数据通信冲突、系统的鲁棒性与数据的可靠性等问题提出了解决方案。
1 系统结构
系统结构图如图1所示。整个系统分为硬件设备和软件协议2个部分。
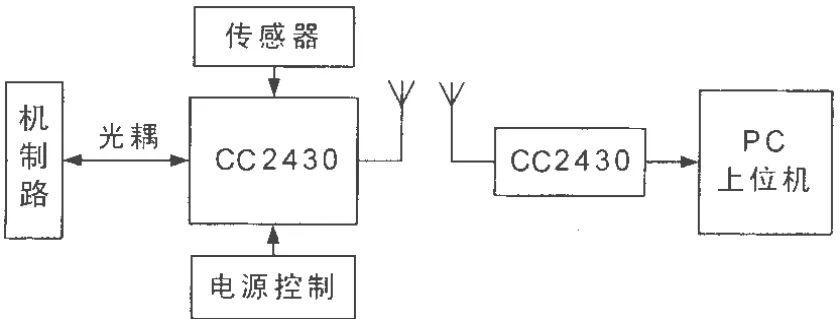
图1 系统结构
硬件设备由主要分为测试平台终端设备和无线网关设备2个大模块。测试平台终端设备主要由电源管理模块、传感器模块、电平转换模块和数据处理模块组成。设计中选用拉线位移传感器测量被测设备的位置状态与速度、加速度信息,选用拉力传感器测量被测设备的载荷状态,藉此以得到被测设备在不同条件下的特性,为产品的安全性、可靠性和耐久性生产设计提供指导。无线网关设备负责网络组建、数据和控制命令的转发与处理,实现测试平台的终端设备与测试终端PC机或笔记本电脑的通信。它主要由数据处理模块和通信协议转换模块组成。
软件协议部分包括上位机软件和通信协议。上位机软件由NI公司的LabVIEW软件编写[1],为用户提供完善的人机交互功能,通过上位机软件来控制硬件的运行,同时,硬件运行所采集到的数据通过上位机处理、显示和保存,存储的数据通过ASP调用SQL数据库能够随时随地通过网站了解设备的测试情况。根据测试的具体要求,通信协议在基于802.15.4协议依照系统的需求进行了优化[2],提出了适用于测试平台的数据通信协议和数字滤波算法,保障了测试平台工作的稳定性和数据的可靠性。
2 系统硬件组成
设计采用无线的方式进行数据通信,需要数据处理与射频收发设备。结合市场现在的通信方式与系统设计的特点,选择TI公司的CC2430处理器作为测试平台终端设备和无线网关的核心器件。该芯片支持IEEE802.15.4通信标准,在芯片内部集成了8通道的模数转换器和射频收发器,具有大量的I/O接口,有利于系统的扩展[3]。
系统选用MIRAN公司MPS-M-2000-V2拉线位移传感器和蚌埠天光测控仪表厂的TJL-1型拉力传感器。MPS-M-2000-V2拉线位移传感器有效量程可达2 000 mm,线性精度为0.3%FS,牵引力最大可达2.5 kg。TJL-1型拉力传感器额定载荷为150 kg,灵敏度为2.0 mV/V。2款高精度的传感器完全可以准确地反应升降机的运行状态。同时,CC2430内置的高精度定时器能精确地控制AD转换的速率。由于升降机在实际运行中不可能有很大的速度和加速度,因此,根据位移计算公式:S=v*t+*a*t2,可以通过拉线位移传感器和CC2430处理器得到在时间t时的位移量S,然后通过位移计算公式得出升降机的运行速度和加速度。这样可以避免额外增加一个加速度传感器,节约设计成本。
系统的设计采用蓄电池进行供电。在硬件设计中,拉线位移传感器用12 V电源供电,拉力传感器和主处理器CC2430采用3.3 V电源供电。标准的蓄电池有12 V和24 V的,但其在使用过程中,输出电压有较大的波动,直接使用12 V的蓄电池给拉线位移传感器供电会影响传感器的精度。因此,采用24 V蓄电池作为系统电源,选用LM2576电源芯片,输出12 V和3.3 V给系统供电。
从电机控制电路过来的信号接口,其高电平达5 V,而CC2430处理器的控制信号高电平为3.3 V。这种电平不兼容性在直接连接时,不能实现控制功能,而且有可能损坏器件。因此,应用光电转换器件TLP281设计电平转换电路,实现信号电平的兼容。
3 系统上位机软件
系统所述的上位机软件是利用NI公司的LabVIEW环境编写,界面友好,方便人机交互。软件的主要功能是实时接收由串口传递的测试数据并加以分包、计算、处理、显示及保存。用户通过上位机软件能够便捷地了解到测试过程的具体情况并能对测试进行具体的操作。
3.1 软硬件握手
为了提高系统的鲁棒性,避免PC机异常卡死对硬件产生的影响,上位机软件每隔5 s通过数据接收终端向数据发送终端发送握手命令。握手的应用能够防止当PC机断电或windows意外死机时候升降机仍然继续按照预定的测试次数继续测试。
3.2 数据库保存以及远程访问
利用工具包LabVIEW SQL Toolkit的实现SQL数据库的保存,将经过上位机前端处理后的数据按照预定的格式循环写入SQL SERVERS数据库中[4]。同时,在上位机中加入异常处理,在系统出现断电或者其他异常状况导致系统终止时,在下次开启的时候自动读取数据库中的最新记录以提醒用户已经测试的周期数以及测试的时间,方便用户继续测试。
在SQLSERVERS服务器端使用ASP调用SQL数据库,将最终结果发布到万维网[5],使得用户在任何时候任何地点都能够及时了解到测试的具体情况,真正实现了不受距离影响的远程监控系统。
4 系统协议
协议是测试台系统的核心部分,不仅起着保证测试台工作稳定性和所需测试数据的可靠性作用,还为上位机监控系统提供在稳定性上的先决支撑。由于测试台需要对升降机的测试状态进行实时地检测,在无线通信上的数据交互要求具有稳定性,避免数据冲突,在数据处理上要求可靠性,需要进行数字滤波,为此在通信协议上提出一种集权轮询法和自适应变频滤波法,保障了测试台工作的稳定性和数据的可靠性。
4.1 集权轮询法
通常所采用的IEEE802.15.4协议标准的媒体访问控制(MAC)层的载波侦听竞争访问通信机制(CSMA-CA)并不适用于升降机测试台的应用,当测试平台终端设备和无线网关设备在测试台监测升降机数据过程中同时有数据需要发送时,便会产生通信冲突从而导致数据包丢失。为此提出了一种集权轮询法作为测试台通信协议MAC层的优化,集权轮询法示意图如图2所示。
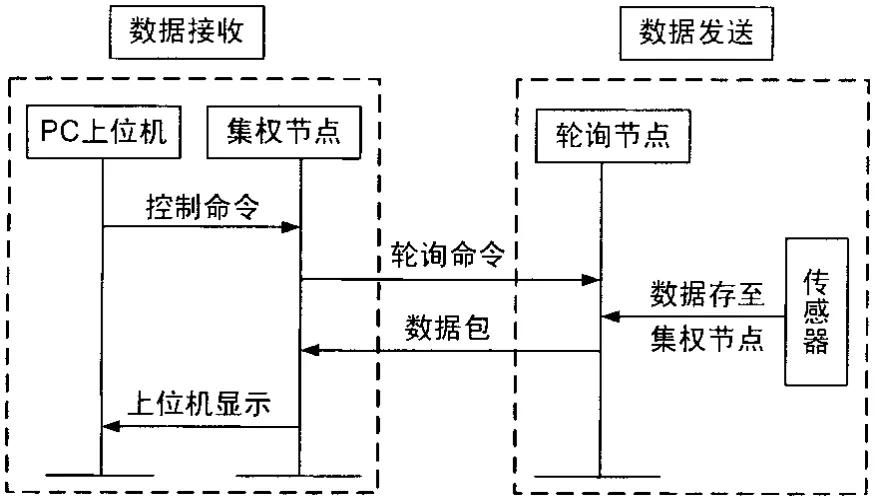
图2 集权轮询法示意图
集权轮询法是指在无线通信节点中,将其中一个节点作为集权节点,将其他节点作为被轮询节点,所有的数据通信都以集权节点为发起方,以被轮询节点为接收方,被轮询节点的数据包都规定在收到集权命令后才被允许发出,其数据包的发送在一个轮询时隙内完成,所有被轮询节点的轮询时隙组成一个轮询周期。
在测试台的通信中,无线网关设备为集权节点,测试平台终端设备为被轮询节点,在测试台对升降机的实时监测过程中,集权节点会周期性地发送轮询命令至被轮询节点,升降机的位移、载荷和电量等数据都会在被轮询节点中处理并打包,当每次收到轮询命令后,便在轮询时隙内发送给集权节点。这种集权轮询法在一定程度上既保证了测试人员对测试台控制的实时性,又保证了测试台对升降机监测数据的稳定性,避免了二者在数据收与发上的通信冲突,解决了实时监测过程中的丢包问题。测试人员对测试台的控制命令和无线网关对测试平台终端设备的管理命令都是嵌入在轮询命令中发出的,被轮询节点收到轮询命令后做出相关反应并上传发送数据。一个轮询时隙大约在30 ms左右,控制命令的下达和监测数据的更新都会在轮询时隙内完成,很好地满足了测试平台实时监控的要求。
4.2 自适应变频滤波法
传感器对升降机状态的监测s都是模拟信号输出,难免会受到各种因素的干扰,在对信号做模数转换后还需要对所得到的数据做数字滤波处理,这个处理的过程属于通信协议应用层的任务。
4.2.1 滤波算法的提出
在被监测的数据中,升降机的位移量数据是可靠性要求最高的一个,它直接影响后期升降机运行速度和加速度等参数的计算和对升降机运行状态的识别。而位移量是一个动态变化的数据,干扰噪声也会淹没在其中随之动态变化,传统的数字滤波法如递推中值滤波法和限幅平均滤波法等[6],都无法很好地起到滤波效果,因此提出了一种自适应变频滤波法来处理位移量数据。
升降机位移量的变化可分为2种阶段:①升降机的运动状态在上升和下降之间发生改变时,此时升降机由减速运动转变为加速运动,位移量呈正弦信号状态变化;②升降机处在上升或者下降状态过程中时,此时升降机近乎匀速运动,位移量呈一阶信号状态变化。2种阶段交替进行,位移量的变化幅度成周期性改变。假设对位移量的数据采集频率为f,单位时间内所采集的位移量为Sn(n=1,2…f),位移量的变化幅度为An(n=1,2…f),当单位时间内的An趋近相等时,则认定Sn处于一阶信号状态变化,此时将采集频率设为f1,而当An出现类似一阶信号状态变化时,则认定Sn处于处于正弦信号状态变化,此时将采集频率设为f2。把数据采集频率f随位移量变化幅度An变化而自适应变化的滤波方法称为自适应变频滤波法。
4.2.2 滤波算法
根据测试台运行环境的相关参数,将干扰噪声系数设为k,由上述所提出的自适应变频滤波算法,将Sn(n=1,2…f)由小到大进行排列得到Sn′(n=1,2…f),将最大和最小k个数据视为噪声干扰数据去掉,最后可得到滤波后的位移量¯S。
假定轮询时隙为t,则t时间内的样本个数n为:

排列后的位移量样本为:

则将位移量样本滤波后的位移量为:

而根据升降机的运动速度水平,要得到更加平滑而有效的数据,f1应大于1 000,而f2则应该是f1的3倍。
位移量在用自适应变频滤波法滤波前和滤波后的实测数据对比示意图如图3所示。

图3 滤波前后比较
如图3可知,经过滤波的数据更加趋于平滑,与实际计算结果基本相符(误差<1%),满足升降机综合性能测试的要求。
4.3 测试结果
为了进一步测试系统的性能,在不同环境、不同距离进行了连续40 000个升降机来回周期的测试。结果显示整个系统运行稳定,鲁棒性良好。同时,对40 000个周期的全部800余万组数据进行多阶段抽样法进行抽样,误差均在许可范围内,抽样结果完全满足测试需要。测试结果如表1所示。

表1 测试结果
5 结束语
基于上述理论所设计的导轨式残疾人升降机综合测试台安装方便、体积小、功耗低、传输稳定、采样精确、可靠性高,完全能够满足实际应用的需要。同时,该方案采用无线通信技术,极大提高了监测范围,可广泛应用于其他测试领域。
[1]阮奇桢.我和LabVIEW[M].北京航空航天大学出版社,2009.
[2]瞿 雷,刘盛德,胡咸斌.ZigBee技术与应用[M].北京:北京航空航天大学出版社,2007.
[3]刘 伟.传感器原理及实用技术[M].北京:电子工业出版社,2009.
[4]郑阿奇.SQL Sever实用教程[M].北京:电子工业出版社,2002.
[5]汪晓平,钟 军.ASP网络卡发技术[M].人民邮电出版社,2003.
[6]远坂俊昭.测量电子电路设计:滤波器篇[M].北京:科学出版社,2006.
猜你喜欢
中国特种设备安全(2019年4期)2019-05-20
计算机与数字工程(2019年2期)2019-02-28
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
中国商论(2016年34期)2017-01-15
自动化学报(2016年8期)2016-04-16
凿岩机械气动工具(2016年3期)2016-03-01
火控雷达技术(2016年1期)2016-02-06
西部学刊(2014年1期)2014-02-14
舰船电子工程(2010年5期)2010-04-26