临近空间编队飞行合成孔径雷达数据仿真
2011-08-08 03:10徐华平李春升
电波科学学报 2011年4期
冯 亮 徐华平 李春升
(北京航空航天大学电子信息工程学院,北京100191)
1.引 言
临近空间合成孔径雷达(SAR)是最近几年对地观测领域的一个新热点。临近空间一般是指距地面20~100 km的空域[1],在此区域既可以避免目前绝大多数的地面攻击,有利于提高SAR系统的生存能力,又可以提高对地观测精度。相对机载SAR而言,临近空间SAR运动速度慢、测绘带宽、脉冲重复频率可选范围大[2-3],与星载 SAR 相比临近空间SAR分辨率高、成本低且易于控制[4]。
编队飞行模式在机载和星载SAR中已经有比较深入的研究[5-6],但临近空间SAR中编队飞行模式还是一个比较新的课题。编队飞行SAR可以应用于侦察和测绘领域,有广阔的应用前景。编队飞行系统采用收发分置模式,可以有效地提高系统的生存能力,还可以实现系统的灵活配置,从而能够获取目标区域多个方向的散射特性,并且可以通过灵活配置基线实现高精度干涉测高和地面动目标显示。由于编队飞行SAR引入了收发分置,需要实现系统之间的同步[7-8],使系统更加复杂,而且由于收发平台都存在运动误差,对补偿方法也提出了较高的要求。
目前国内外对临近空间SAR的研究还处于理论研究阶段。文献[4] 提出可以将临近空间SAR应用于逆合成孔径雷达(ISAR)、同时提高分辨率和测绘带宽、双站SAR等方面,文献[9] [10] 对临近空间SAR在高分辨率大测绘带成像方面的应用进行了研究。但到目前为止还没有公开的文献讨论临近空间编队飞行SAR的空间几何关系和数据仿真问题。
为了给临近空间编队飞行SAR的系统设计、性能分析和成像算法验证等提供可靠的数据源,文章基于沿平行轨迹飞行的双SAR编队对临近空间编队飞行SAR的回波数据仿真展开研究。在对临近空间SAR及临近空间编队飞行SAR的研究现状进行总结的基础上,文章第二部分研究了临近空间编队飞行SAR的空间几何关系,第三部分提出了临近空间编队飞行SAR的回波数据仿真方法,包括回波信号模型、全链路误差仿真分析和全链路数据仿真流程,第四部分通过数字仿真实验验证了该数据仿真方法的有效性,最后一部分对全文进行了总结。
2.临近空间编队飞行SAR空间几何关系
临近空间编队飞行SAR的空间几何关系是建立仿真模型和研究成像算法的基础。相对于卫星而言临近空间SAR平台所处高度比较低,该平台并不依靠地球引力运动,不像星载SAR一样沿绕地轨道运行,而基本在同一高度平面内,且运行区域比较小,所以在临近空间SAR系统分析及仿真中可以忽略地球的自传;相对机载平台来说,临近空间SAR平台所处位置较高,测绘带宽明显增大,大视角情况下尤其明显,这样导致测绘带内地球曲率不可忽略。
图1给出了临近空间等速度并行编队飞行SAR的空间几何关系。图中N表示仿真中心时刻主飞行器的星下点,(Λ,Φ)为其经度和纬度,H为该时刻临近空间主飞行器的高度,P表示地面目标。为了能够方便地注入系统误差,本文建立了九个坐标系,分别定义为:
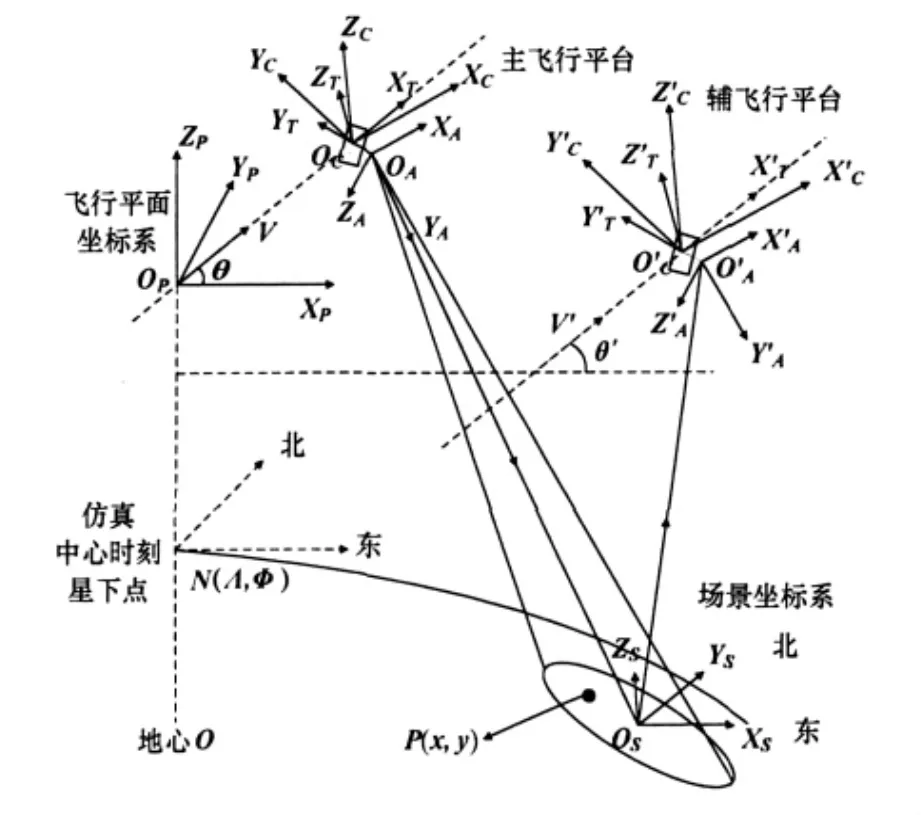
图1 临近空间编队飞行SAR空间坐标系
1)地球坐标系EE(图中未具体画出),其中O为地心,X轴在地球赤道平面内,正向指向春分点,Z轴正方向沿地轴指向北极,Y轴在赤道平面内,由右手定则确定;
2)飞行平面坐标系EP,该坐标系定义在主飞行器的飞行平面内,坐标系原点OP即仿真中心时刻飞行器所处位置,ZP轴沿地心和星下点连线,正方向背离地球方向,坐标面XPOPYP垂直于ZP轴,XP轴指向正东,YP轴指向正北;
3)主飞行轨迹坐标系ET,图中V表示主飞行器的速度,与飞行平面坐标系的X轴夹角为θ,该坐标系原点定义在飞行平面内的飞行器轨迹上,随飞行器飞行而变动,其X轴正方向指向飞行器的预设飞行方向,Z轴垂直于飞行平面且正向背离地球方向;
4)主飞行器坐标系EC,其坐标系原点和主飞行轨迹坐标系的坐标原点重合,X轴的正方向指向飞行器实际飞行方向,Y轴和Z轴为飞行器的另外两个惯性主轴方向;
5)主天线坐标系EA,该坐标系的X轴正方向指向飞行器实际飞行方向,Y轴沿波束中心指向地球表面;
6)辅飞行器轨迹坐标系E′T和辅飞行器坐标系E′C的坐标原点根据主飞行器轨迹坐标系原点和编队基线矢量来确定,二者的坐标轴可分别参照主飞行轨迹坐标系ET和主飞行器坐标系EC来定义;
7)辅天线坐标系E′A应当按照辅天线波束控制规律来定义,其中Y轴沿波束中心指向地球表面。
3.临近空间编队飞行SAR数据仿真方法
3.1 临近空间编队飞行SAR回波信号模型
回波信号的数学模型是进行SAR数据仿真的基础[11-14],在单站SAR回波信号的基础上,式(1)给出了编队飞行SAR的回波信号数学模型:
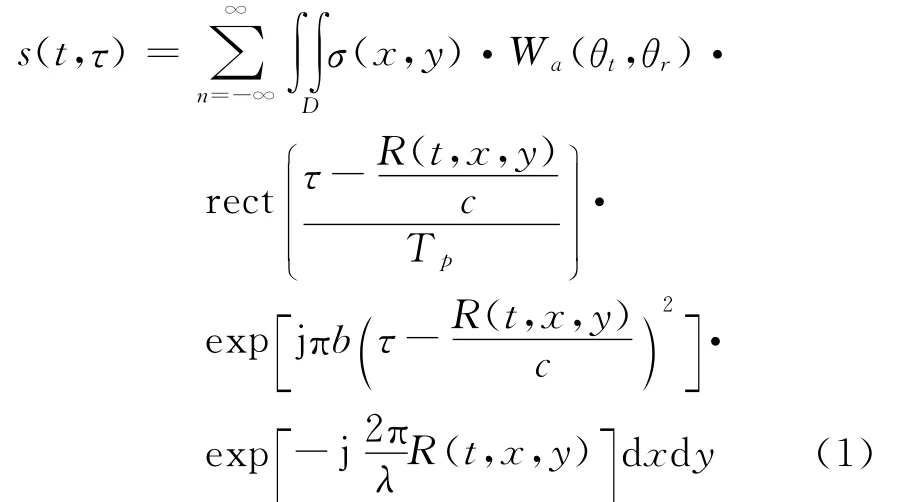
式中:Tp是脉冲宽度;t是方位向慢时间;τ是距离向快时间;R(t,x,y)是发射信号SAR天线相位中心和接收信号SAR天线相位中心到(x,y)处地面目标的距离和。
下面对R(t,x,y)进行矢量分析,Rt(t,x,y)表示t时刻地面目标相对于发射天线相位中心的位置矢量,Rr(t,x,y)是该时刻地面目标相对于接收天线相位中心的位置矢量,则有

根据图1中的空间几何关系,可以进行如下的表示,其中AB表示由A点指向B点的矢量。

式中:

在实际计算中,为了计算的方便,会在不同的坐标系中求取式(5)~(7)中各个矢量的坐标值,然后通过坐标转换将以上各个矢量表示在同一个坐标系中。为了便于计算地面目标相对于两个天线的视线夹角和视线距离,可以将各矢量转换至发射天线坐标系或接收天线坐标系下,将Rt(t,x,y)和Rr(t,x,y)分别在发射天线坐标系和接收天线坐标系下表示,如下所示。

式中:[·]A表示将相应的矢量转换到发射天线坐标系下;[·] ′A表示将相应的矢量转换到接收天线坐标系下。
求得矢量Rt(t,x,y)和Rr(t,x,y)即可求出式(1)中所需的各个变量,进而模拟回波信号。
3.2 临近空间编队飞行SAR全链路误差仿真
为了真实地反映临近空间编队飞行SAR的工作过程,为系统设计、性能分析及成像算法验证等提供有效的回波数据,应该在数据仿真系统中加入系统误差的模拟。在对全链路各环节进行分析的基础上,图2给出了临近空间编队飞行SAR的主要系统误差,按发射、传输、接收三个阶段进行了分类,在各阶段又针对编队、平台、SAR系统、天线等进行分析,给出了相应的误差分类。如图2所示临近空间编队飞行SAR系统的误差主要包括运动误差、姿态误差、三大同步误差、雷达系统误差和信道误差等。
由于受到诸多因素影响,临近空间慢速飞行器运行中难以保持理想的匀速直线运动,由此产生的误差会严重影响编队飞行SAR的成像质量。可以在飞行平面坐标系中将运动误差叠加在主(辅)飞行器平台的位置矢量和速度矢量上。
姿态误差包括飞行器三轴姿态误差(偏航、俯仰、横滚)、天线指向误差和天线指向稳定度。这三种误差可以通过临近空间编队飞行SAR的空间几何关系的转换矩阵反映出来。飞行器三轴姿态误差通过飞行器姿态角(偏航角、俯仰角和横滚角)叠加上相应的误差,然后通过主(辅)飞行轨迹坐标系和主(辅)飞行器坐标系之间的转换矩阵注入回波仿真模型。天线指向误差是指天线指向角偏差的均值,而天线指向稳定度是指天线指向角变化的平均角速率。天线指向误差和天线指向稳定度通过主(辅)飞行器坐标系和主(辅)天线坐标系之间的转化矩阵注入到仿真模型中。
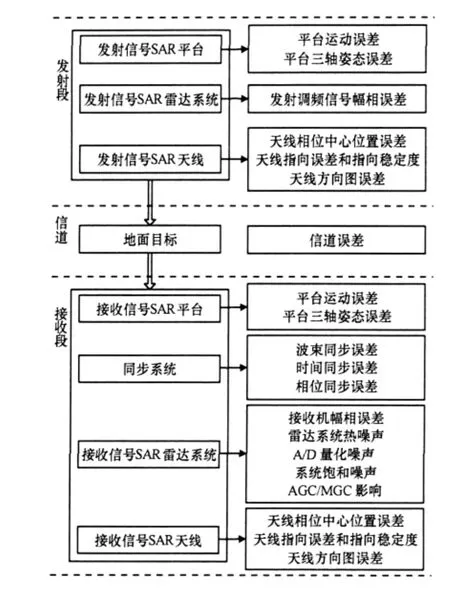
图2 临近空间编队飞行SAR系统误差分析
在编队飞行SAR系统中,发射信号SAR和接收信号SAR之间必须保持同步,包括波束同步(即主辅天线照射同一区域)、时间同步(主辅SAR触发同步)、相位同步(即主辅SAR信号保持相干)。但由于同步系统的精度有限以及其它限制因素导致同步不完全,而同步系统本身也会引入误差,所以主辅SAR系统之间会有残留的同步误差。空间同步误差可以在计算地面目标相对于主(辅)SAR天线的视线夹角时注入仿真系统。时间同步误差和相位同步误差可以通过处理已经生成的理想视频回波信号数据来加入。
雷达系统误差和信道误差也是编队飞行SAR系统中的重要误差。雷达系统误差包括发射调频信号幅相误差、接收机幅相误差、天线方向图误差、雷达系统热噪声、A/D量化噪声、系统饱和噪声、AGC/MGC的影响等等。信道误差就是指由信道传输误码率所产生的信号传输误差,其仿真方法如下:首先根据所给定的信道传输误码率计算出信道传输矩阵,构造出相应的传输信道,然后将已量化好的回波仿真信号经过该传输信道,从而将误差注入回波仿真系统。
3.3 临近空间编队飞行SAR数据仿真流程
以上两小节分别给出了临近空间编队飞行SAR的回波信号模型,并针对全链路误差的仿真问题进行了分析。在此基础上,图3给出了相应的SAR回波信号仿真流程。具体仿真方法如下:

图3 临近空间编队飞行SAR数据仿真流程
1)根据主飞行平台的初始参数(高度和速度等)计算飞行平面坐标系原点在地球坐标系中的坐标,再根据编队飞行SAR的基线参数计算辅飞行平台在飞行平面坐标系中的坐标;
2)在1)的基础上计算各仿真时刻主(辅)平台在飞行平面坐标系中的位置矢量,并注入运动误差;此时可根据预设的三轴姿态误差计算主(辅)飞行轨迹坐标系和飞行器坐标系之间的转换矩阵,完成三轴误差的注入;
3)注入主辅天线相位中心的位置误差,求得它们在主(辅)飞行器坐标系中的位置矢量;
4)根据预设的主天线波束控制规律,获得主天线坐标系和主飞行器坐标系间的转换矩阵;结合天线相位中心位置信息,计算当前仿真时刻主天线波束中心在地面上的瞄准点位置;
5)根据编队飞行的波束同步要求,计算辅天线波束指向信息,注入波束同步误差,求得辅天线坐标系与辅飞行器坐标系之间的转换矩阵;
6)在以上各步获得相关转换矩阵的基础上,将地面目标信息注入仿真系统,计算各目标点在主(辅)天线坐标系中的位置矢量,在此基础上即可求得各目标相对于主(辅)天线相位中心的视线夹角(θt和θr)和视线距离(|Rt(t,x,y)|和|Rr(t,x,y)|),同时可以注入天线指向误差和天线方向图误差;
7)将视线距离和视线夹角代入式(1),计算相应的视频信号,在此过程中可以注入发射调频信号的幅相误差、接收信号SAR的雷达系统误差、时间同步误差、相位同步误差及信道误差,最终获得临近空间SAR回波数据。
4.数字仿真试验
表1给出了临近空间编队飞行SAR数字仿真的参数,包括主飞行器的初始平台参数(仿真中心时刻的高度和速度)及主辅飞行器间的基线信息等。基于图3所示的数据仿真流程并利用该参数对图2所示的各种误差进行了全链路仿真,仿真结果均证明了仿真方法的正确性。

表1 临近空间编队SAR平台参数
系统热噪声是雷达系统中比较普遍的现象,在编队飞行SAR系统中会影响图像质量和干涉性能,是系统总体设计和系统性能分析中必需考虑的问题之一。图4给出了基于真实DEM数据的三维面目标仿真结果,其中(a)图为DEM数据的灰度图像,(b)图为理想情况下SAR数据成像结果,(c)图为注入信噪比为-13 d B(脉冲压缩前)的系统热噪声情况下SAR数据成像结果,可以明显看出(b)图的质量要优于(c)图。该试验结果说明了本文提出的仿真方法既可以有效地模拟SAR系统热燥声,又可以基于复杂地形数据进行SAR数据的模拟。
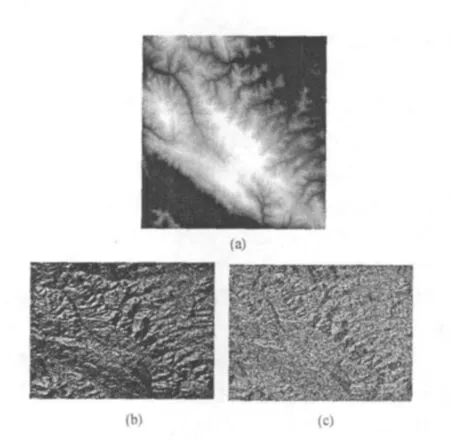
图4 基于DEM数据的编队飞行SAR仿真结果
三大同步误差是临近空间编队飞行SAR系统中不可忽视的误差,该误差太大将会导致编队SAR系统性能降低。经过多次仿真试验,上文所述的仿真系统中针对三同步误差的仿真方法是有效的。由于波束同步相对简单,时间同步误差和相位同步误差在分析方法上有一定的相似性,所以这里只给出了时间同步误差的试验结果。图5给出了点目标的仿真结果,其中(a)图为理想情况下的图像,而(b)图中注入了高斯型随机时间同步误差。为了更明显地看出时间同步误差仿真的效果,图6对理想情况下的点目标仿真数据和注入高斯型时间同步误差的点目标数据进行了比较,实线是理想情况下沿方位向的点目标剖面曲线,虚线是注入时间同步误差情况下沿方位向的点目标剖面曲线,可以看出高斯型随机时间同步误差使目标在方位向出现偏移,同时对旁瓣信号有较大影响,和理论分析结果一致。

图4和图5的仿真结果均说明了本文给出的回波仿真方法的可行性和有效性。
5.结 论
针对临近空间编队飞行SAR的数据仿真进行了深入研究,在分析其空间几何关系和系统误差的基础上,给出了完善的回波数据仿真流程。文章进行了基于真实DEM数据的三维面目标仿真实验和注入高斯型时间同步误差的仿真实验,实验结果证明了本文数据仿真方法的可行性和有效性。
[1] 李怡勇,李 智,沈怀荣.临近空间飞行器发展与应用分析[J] .装备指挥技术学院学报,2008,19(2):61-65.LI Yiyong,LI Zhi,SHEN Huairong.Analysis on development and application of near space vehicle[J] .Journal of the Academy of Equipment Command &Technology,2008,19(2):61-65.(in Chinese)
[2] 王晓峰,董 臻,梁甸农.临近空间慢速平台SAR结合运动补偿的SCFT算法[J] .系统工程与电子技术,2008,30(10):1969-1973.WANG Xiaofeng,DONG Zhen,LIANG Diannong.SCFT processing algorithm based on motion compensation for near space slow platform SAR[J] .Systems Engneering and Electronics,2008,30(10):1969-1973.(in Chinese)
[3] 王晓峰,董 臻,梁甸农.临近空间慢速平台SAR基于RD算法的运动补偿[J] .雷达科学与技术,2007,5(4):258-264.WANG Xiaofeng,DONG Zhen,LIANG Diannong.Motion Compensation based on RD algorithm for near space slow platform SAR[J] .Radar Science and Technology,2007,5(4):258-264.(in Chinese)
[4] WANG Wenqin,CAI Jingye,PENG Qicong.Nearspace SAR:A revolutionary microwave remote sensing mission[C] //The 1st Asian and Pacific Conference on Synthetic Aperture Radar.Huangshan,2007:127-131.
[5] 黄钰林,杨建宇,武俊杰,等.机载双站SAR分辨率特性分析[J] .电波科学学报,2008,23(1):174-178.HUANG Yulin,YANG Jianyu,WU Junjie,et al.Resolution characteristic analysis for bistatic airborne SAR[J] .Chinese Journal of Radio Science,2008,23(1):174-178.(in Chinese)
[6] 黄卫东,张育林.分布式小卫星合成孔径雷达的空间编队构形研究[J] .电波科学学报,2005,20(2):207-211.HUANG Weidong,ZHANG Yulin.Configuration design of distributed small satellites synthetic aperture radar[J] .Chinese Journal of Radio Science,2005,20(2):207-211.(in Chinese)
[7] WANG Wenqin,PENG Qicong,CAI Jingye.Phase synchronization errors on near-space passive bistatic radar imaging[C] //The 2009 IEEE Circuits and Systems International Conference on Testing and Diagnosis.Chengdu,2009,1-4.
[8] 汤子跃,张守融,王卫延.运动误差对双站SAR相位同步及成像的影响[J] .电子学报,2003,31(12):1907-1910.TANG Ziyue,ZHANG Shourong,WANG Weiyan.The influence of motion error on the phase synchronization and imaging of bistatic-SAR[J] .ACTA Electronic SINICA,2003,31(12):1907-1910.(in Chinese)
[9] WANG Wenqin.Near-space wide-swath radar imaging with multiaperture antenna[J] .IEEE Antennas and Wireless Propagation Letters,2009,8(1):461-464.
[10] WANG Wenqin,PENG Qicong,CAI Jingye,et al.Azimuth signal processing for near-space high-resolution and wide-swath SAR imaging[C] //The 9th International Conference on Signal Processing.Beijing,2008,2330-2333.
[11] CHEN Jie,ZHOU Yinqing,LI Chunsheng.Spaceborne synthetic aperture radar raw data simulation of three dimensional natural terrain[C] //2001 CIE International Conference on Radar Proceedings.Beijing,2001:619-923.
[12] 文 竹,周荫清,陈 杰.星载SAR回波信号仿真系统及关键技术研究[J] .电子与信息学报,2004,26(增刊):68-74.WEN Zhu,ZHOU Yinqing,CHEN Jie.Recearch of spaceborne SAR echo simulation and the key technology[J] .Journal of Electronics &Information Technology,2004,26(supplement):68-74.(in Chinese)
[13] 文 竹,周荫清,陈 杰.分布式小卫星SAR回波信号精确仿真方法研究[J] .宇航学报,2006,27(5):909-914.WEN Zhu,ZHou Yinqing,CHEN Jie.Research on distributed satellite SAR echo signal accurate simulation method[J] .Journal of Astronautics,2006,27(5):909-914.(in Chinese)
[14] 徐 丰,金亚秋.复杂自然场景双站SAR成像模拟[J] .电波科学学报,2008,23(6):1022-1031.XU Feng,JIN Yaqiu.Bistatic SAR Image simulation[J] .Chinese Journal of Radio Science,2008,23(6):1022-1031.(in Chinese)
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2017年3期)2017-11-23
传媒评论(2017年8期)2017-11-08
北京航空航天大学学报(2017年10期)2017-04-20
小朋友·快乐手工(2015年5期)2015-06-06
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27