焊接机器人如何快速实现DeviceNet通信——基于DeviceNet协议的XGate-DVN10应用
2011-08-13 06:33广州致远电子有限公司
电子技术应用 2011年7期
1 引言
随着中国工业的崛起,对工业设备的生产效率和焊接质量,以及焊接设备的可靠性、稳定性提出了更高的要求。装配焊接线是生产线上最重要的一部分,焊接分为人工焊接和机器人焊接两种方式。为了提高焊接效率和产品质量,设备的关键部位通常采用焊接机器人操作,机器人定位准确、焊接和冲孔精度高、质量稳定,而且可在人工难以操作的部位出色地完成焊接。
焊接机器人生产线早期只是把多台工作站(单元)用工件输送线连接起来组成一条生产线。这种生产线仍然保持单站的特点,即每个站只能用焊接机器人的程序来焊接预定的工件,在更改程序的一段时间内,这条线是不能焊其他工件的,从而导致整个系统复用率低、布线复杂、调试和维护系统的成本高等缺点。CAN总线的推出使得系统布线得到最大程度的改善,基于CAN总线应用层的DeviceNet协议更是改变了设备与控制系统之间的通信方式,提高生产线的复用率、减少设备维护成本。
本期文章将介绍如何利用XGate-DVN10模块设计一款基于DeviceNet从站协议的焊接机器人通信模块。
2 XGate-DVN10简介
广州致远电子有限公司长期致力于DeviceNet产品的研发,推出了一款非常易于使用、稳定可靠的DeviceNet从站协议转换模块——XGate-DVN10。图1所示为XGate-DVN10应用简图和内部结构示意图。作为通用DeviceNet从站设备,其内部已经集成了从站协议栈代码,且所有功能均通过 ODVA的一致性测试软件(A21)的测试,保证了与其他DeviceNet设备的良好兼容性。
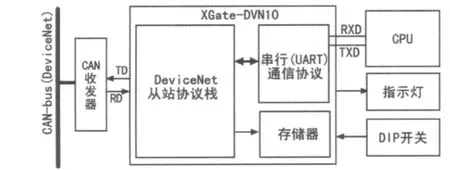
图1 XGate-DVN10应用简图和内部结构图
XGate-DVN10为DIP24封装,拥有较小的占位面积(6 cm2),使其更容易集成到用户设备中。其硬件设计比较简单,用户只需要将模块嵌入到焊接机器人中,与CPU的串口连接即可完成设计。
3 使焊接机器人具有DeviceNet功能
现阶段国内生产的焊接机器人绝大部分不具有现场总线接口(DeviceNet),有些设备虽然在性能及价格上都优于国外的同类产品,但是都无法替代它们,归根结底就是在设备的通信方式上未跟上国外的步伐。以下提供一种在现有焊接机器人控制部分不变的情况下,使焊接机器人快速实现先进的DeviceNet从站通信能力的方法。
3.1 焊接机器人DeviceNet通信接口硬件设计
在机器人的控制系统中,用户只需提供一路串口和XGate-DVN10进行通信,实现总线上机器人的I/O数据与控制系统的数据交互,其硬件设计框图如图2所示。
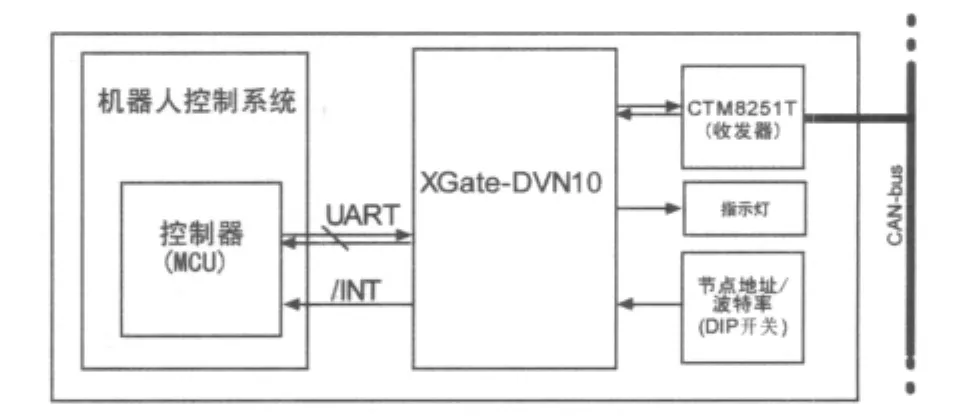
图2 XGate设计框图
下文主要介绍如何为焊接机器人添加总线接口,控制器选用经典的51系列单片机P89V51RD2。
图3所示为XGate-DVN10与MCU之间的连接原理图,通常情况下只需要连接通信接口(UART)和 XGate-DVN10的中断输出信号,就可与模块进行正常的通信。在特殊情况下,可连接模块的复位线至控制器的I/O端口,以方便控制XGate-DVN10复位。
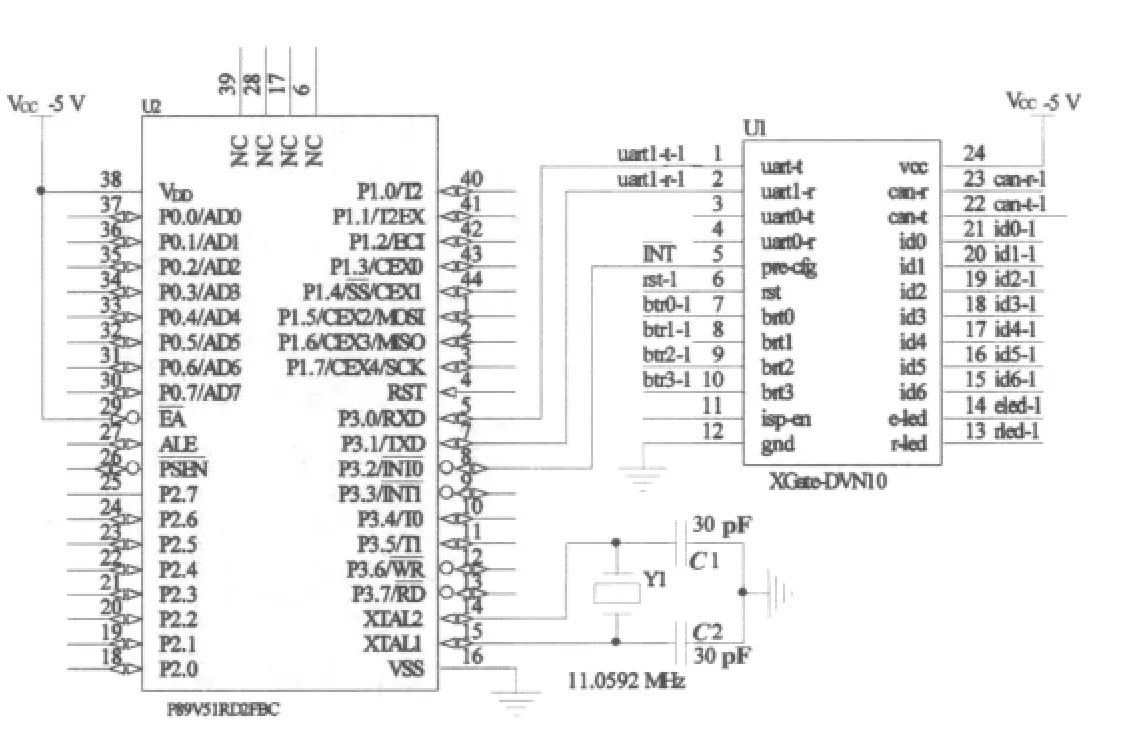
图3 控制器与XGate-DVN10连接电路设计
图4所示为XGate-DVN10的CAN总线连接原理图。为了使设计更加简单,CAN收发器使用了CTM8251T模块,该模块集成了CAN收发器、电气隔离、TVS总线保护等措施,从而使CAN总线通信更加稳定可靠。
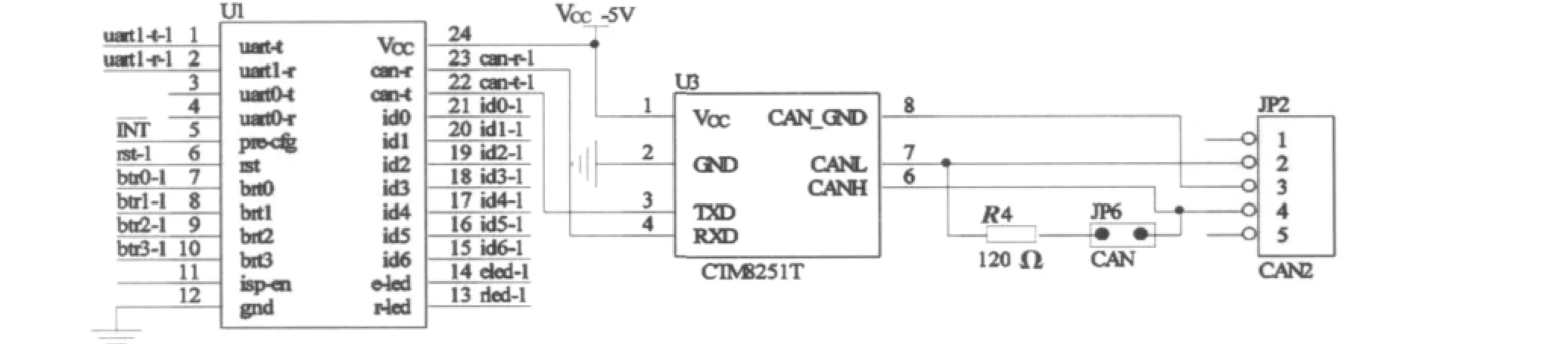
图4 XGate-DVN10与CAN网络连接电路设计
3.2 焊接机器人DeviceNet通信接口软件设计
XGate-DVN10支持 DeviceNet规范的 4种连接类型(位选通、轮询、状态改变/循环),并为每种连接方式分配了最大I/O报文为128 B的内存。内存视图如图5所示。XGate-DVN10协议转换模块的内存区大小可由用户自定义,用户可以根据不同的应用场合,选择合适的连接类型和支持的I/O报文长度。
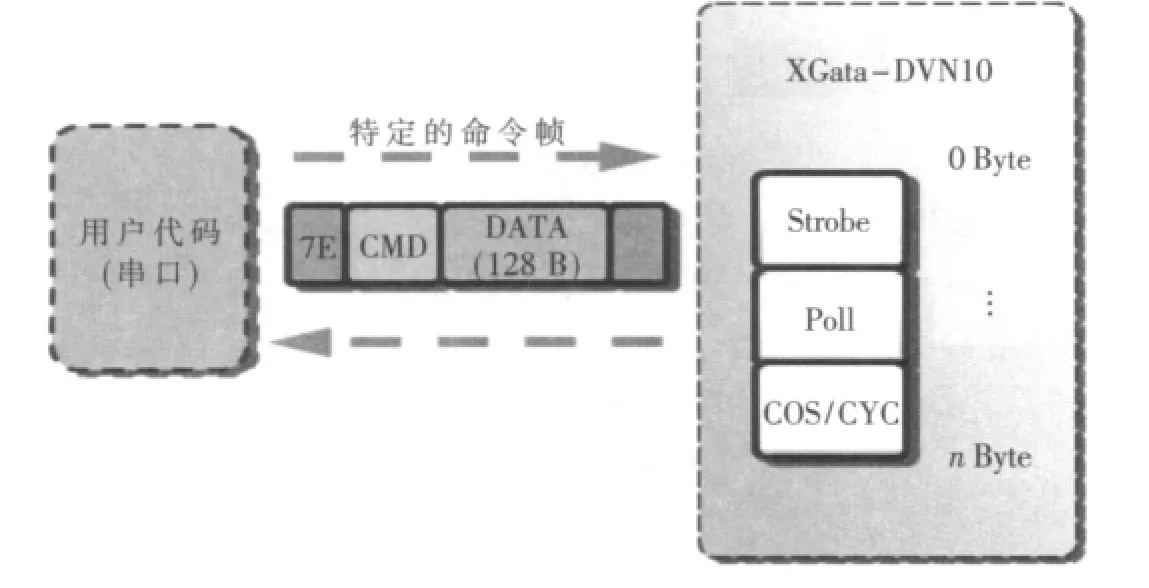
图5 XGate-DVN10内存视图
以轮询连接方式为例,I/O数据生产消费长度都为8 B,I/O信息可包含电流值、电压值、焊接时间、焊接坐标等等,结构定义如表1所示。用户只需要把控制数据写入到XGate-DVN10轮询数据输入存储区,XGate-DVN10就会按照DeviceNet协议的定义对数据进行解析处理。同样来自DeviceNet网络中控制信息也会经过解析之后存放于轮询数据输出区,用户只需要读出即可。

表1 轮询I/O数据
为了方便用户快速可靠地实现通信,广州致远电子有限公司提供了XGate-DVN10串口协议的驱动源码。用户程序软件流程如图6所示。当XGate-DVN10的输出内存区接收到DeviceNet网络中的实时数据之后就会立即向用户MCU产生一个中断,此时用户可以通过UART发送相关命令字读取轮询连接的数据内容。

图6 XGate-DVN10软件设计流程图
4 结语
经过以上步骤,我们快速地实现了对焊接机器人添加DeviceNet通信接口,轻松地实现了对现有的焊接机器人设备的升级,并能与国外同等设备进行竞争。相信在XGate-DVN10的帮助下,能使你获得更大的成功。

地址:广州市天河区车陂路黄洲工业区3栋2楼
技术支持:(020)28267846
销售电话:(020)28872342 28872450
电子邮箱:DeviceNet@zlg.cn

猜你喜欢
今日农业(2021年13期)2021-11-26
锻压装备与制造技术(2021年2期)2021-07-19
当代陕西(2019年13期)2019-08-20
计算机与数字工程(2019年2期)2019-02-28
现代企业文化(2016年1期)2016-12-23
自动化学报(2016年8期)2016-04-16
火控雷达技术(2016年1期)2016-02-06
电脑爱好者(2015年21期)2015-09-10
有色金属设计(2015年2期)2015-02-28
测绘科学与工程(2014年5期)2014-02-27