基于PI-RP复合控制策略的船用单相APF设计与仿真
2011-08-20 08:40许荣彧樊友文杨华荣
舰船科学技术 2011年8期
许荣彧,樊友文,杨华荣
(武汉第二船舶设计研究所,湖北 武汉 430064)
0 引言
大量先进的电子、电气设备、系统的装船应用和高度集成,必然导致舰船电网品质的复杂和恶化。应用开关电源、逆变、变频等元器件的非线性负载设备将引入谐波干扰,大功率冲击性、波动性负载设备的投入、退出则引入瞬变尖峰干扰。另一方面,电子、电气设备多属于电磁敏感性设备,受到谐波传导干扰易出现性能降级,导致电磁兼容问题。传统上采用电源EMI滤波器、瞬变尖峰抑制器等LC无源器件抑制非线形负载带来的传导干扰,但LC无源器件对于低频谐波干扰发挥作用并不理想,同时其滤波效果依赖于系统阻抗特性,并受温度漂移、谐波污染程度、滤波电容老化及负载变化等影响[1]。如今,利用有源电力滤波器(Active Power Filter,APF)进行谐波抑制和无功补偿已成为解决电能质量问题的一个重要趋势[2]。有源电力滤波器能很好地克服无源滤波器的原理性缺陷,具有对谐波电流实时、可控跟踪补偿的能力,应能成为改善舰船电网品质、抑制负载侧谐波引入的有力工具。
本文首先描述有源电力滤波器的技术原理,从工程实际的角度出发,设计用于抑制舰船电网负载侧谐波干扰的单相有源电力滤波器,分析系统组成和原理,选用适用的拓扑结构,重点分析谐波电流补偿控制策略,利用MATLAB/Simulink程序对系统及控制电路建立仿真模型,根据仿真数据给出研究结论。
1 技术原理
有源滤波器通过检测待补偿对象(电压或电流)的谐波瞬时值,经运算电路计算得出指令信号,控制补偿电流发生电路产生与负载电流谐波大小相等、相位相反的补偿电流量,从而补偿、抵消引入的谐波分量,改善电网供电品质。设计的船用单相APF以负载侧引入的谐波电流为待补偿对象。
根据有源滤波器与电网连接的拓扑结构可以分为并联型、串联型、串并联综合型等不同类型[1]。不同的结构有不同的特性和适用场合。并联型APF通过耦合变压器并入电网系统,不对电网系统运行造成影响,投切方便灵活,保护简单,容易满足船用设备的可靠性、维修性、船用环境适应性等要求,故船用APF选用并联型拓扑结构。
船用APF系统组成及原理图(见图1)。船用APF等效于一个受控电流源,通过跟踪负载电流中的谐波分量,产生与其大小相等、方向相反的补偿电流,抵消谐波电流,使得源侧电流接近标准正弦波。图中,Is和IL分别表示源侧电流和负载侧电流,Ic表示APF输出的补偿电流。负载电流IL中含有基波电流ILf和谐波电流ILh,APF通过运算控制输出与谐波电流ILh大小相等、相位相反的补偿电流Ic,则

图1 APF系统组成及原理图Fig.1 Principle diagram of APF

式(1)表明补偿后电源电流Is中仅包含负载电流中的基波分量ILf,实现APF对负载侧产生谐波电流的补偿。
2 检测控制
谐波检测电路和补偿电路构成APF的主体结构,补偿电流的检测和控制是实现APF功能的核心,直接影响APF补偿的精确性和快速性。适用于单相APF的检测算法包括傅立叶变换算法和基于瞬时无功功率理论的p-q或 ip-iq算法等。[3]采用瞬时无功功率理论算法时还需针对单相电路作相应的三相改进,即将检测单相电流作为虚拟三相电流的a相,再分别延时120°和240°构成b相和c相电流。检测算法确定后,控制系统根据电流检测得到的指令电流信号,合理地控制逆变器开关器件的动作,使实际输出补偿电流能实时跟随指令电流,是确保系统性能和效率的关键环节。
控制系统采用双闭环控制结构方式,即直流侧电压外环控制和内环输出电流控制。电压外环采用成熟的PI控制,电流内环控制策略选取尤为关键。常用的控制方案包括滞环控制、单周控制、重复控制等。
2.1 PI控制分析
PI控制是控制领域比较有效和成熟的方法,由比例和积分2个环节构成。PI控制原理是根据系统的误差,利用比例、积分计算控制量进行控制。PI原理框图见图2。其控制规律为[4]:

其中:KP为比例系数;KI为积分系数。经离散化后得到数字PI的表达式:

PI控制效果由系数KP和KI决定。比例系数KP选取过大,则系统偏差响应快,不稳定;选取过小系统较稳定但静差较大。积分系数KI选取小有利于积分作用加强,容易消除静差;但过小使得积分作用太强,被控参数振荡加剧,稳定性降低。反之,KI选取过大,积分作用太弱,静差消除很慢。
2.2 RP控制分析
重复控制(Repetitive Control,RP)来源于控制理论中的内模原理。控制原理是在系统周期不变的前提下将上一周期的控制误差应用到当前控制量的生成中,适合周期性信号的跟踪或抑制。

图2 PI控制原理框图Fig.2 Block diagram with principium of PI control
图3的RP控制原理框图中,低通滤波器Q(z)可简单取为小于1的常数,它与周期延迟环节z-N串联构成RP的内模部分,消除N个开环极点,使开环系统不呈现临界振荡状态,同时,z-N使控制动作延迟1个基波周期。当假定指令和扰动都是重复性时,系统下1个周期的控制作用将具有一定超前性。补偿器S(z)针对对象GP(z)的特性而设置,通过在前1周期获取的误差信息在1个周期后给出恰当的相位和幅值的控制量,以抵消误差[5]。

图3 RP控制原理框图Fig.3 Block diagram with principium of RP control
2.3 PI-RP复合控制策略
舰船电网及负载设备在动态响应性能和稳态补偿精度上对APF系统均有所要求。PI控制易于操作、鲁棒性好,但积分增加开环增益,降低稳态精度,离散量化误差也影响了稳定性;RP控制虽然动态性能差,但无静差控制的稳态性能优良,尤其适合稳态周期性谐波信号的抑制。因此提出基于PI-RP的复合控制策略,PI控制和RP控制并联协调工作,既利用PI控制的快速响应特性保证系统的动态性能,又利用重复控制来提高稳态时系统的补偿精度。
PI-RP复合控制原理框图如图4所示,由PI控制和RP控制并联组成。PI控制对输出谐波指令误差进行实时调整,改善船用单相APF系统的动态性能;RP控制用来消除系统的周期性跟踪误差,改善单相APF系统的稳态补偿精度。PI控制和RP控制并联在系统的前向通道,稳态时系统的跟踪误差小,PI控制作用很小,主要由RP控制发挥作用;当负载出现大的扰动时,跟踪误差突然变大,PI控制跟踪误差突变并立即产生调节作用,而RP控制存在1个工频周期的延时,在1个工频周期内无法产生调节作用,1个周期过后,RP控制调节跟踪误差按衰减因子迅速减小,PI控制的调节作用随之减弱,直至系统达到新的稳定运行状态[6]。

图4 PI-RP复合控制原理框图Fig.4 Block diagram with principium of PI-RP compound control
根据复合控制原理框图,可得到跟踪误差与给定的关系:

由式(4)得到复合控制系统特征方程:


3 仿真分析
3.1 仿真模型
Simulink是MATLAB软件的一个实现动态系统建模、仿真与分析的仿真集成环境工具包。在系统设计中预先进行仿真和分析,可对系统实时修正或按照仿真的最佳结果调试参数,减少实际系统设计的时间[7]。为了验证理论分析的正确性和可行性,利用MATLAB/Simulink强大的数学模块建立了基于PI-RP控制策略船用单相APF的系统仿真模型,见图5。
船用单相APF系统模型电制为单相220 V、50 Hz,选取直流侧电压 Udc=400 V,直流侧电容Cdc=20 mF,交流测电感L=0.6 mH,开关频率12 kHz,交流侧配置滤波器用于滤除开关频率及其他高频谐波分量,非线性负载由单相不控整流桥接串联RL模拟。

图5 APF系统仿真模型Fig.5 Simulation model of APF system
3.2 仿真结果
图6~图8是单相APF系统模型稳态仿真后0.7~0.8 s时间内的负载侧电流IL、补偿电流Ic和源侧电流Is波形。

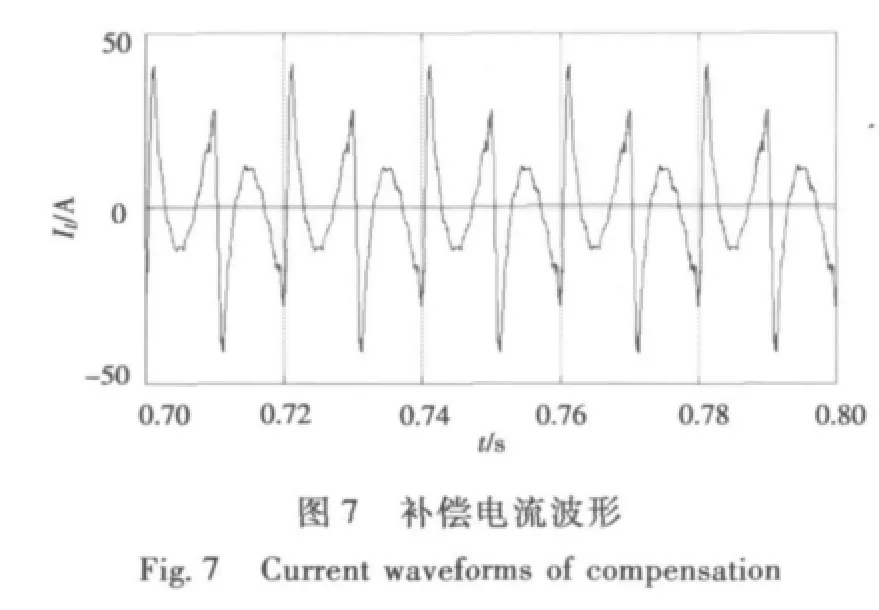
从图6~图8的仿真数据可以看到,电路中单相APF实时检测运算并控制输出补偿电流,电流补偿后不规则的负载波形修正成基本标准的正弦形式波形,源侧电流波形质量得到明显的改善。




图9是负载侧电流和源侧电流3~13次谐波的频谱对比。可以看到,非线性负载侧电流得到单相APF补偿后,各次谐波均得到有效滤除,谐波含量明显下降,3次谐波含量由19.12%降至 0.78%,5次由11.53%降至0.78%,各单次谐波含量均满足相关国军标中关于单次谐波含量小于3%的要求;总电流波形畸变率(THD)也有明显下降,从25.45%降至4.28%,满足相关国军标中关于THD小于5%的要求。
为验证PI-RP复合控制策略下船用单相APF的动态响应特性,修改Simulink模型程序,仿真运行过程中负载突变过程的系统响应情况,在0.54 s和0.7 s时分别模拟负载启动和停机。仿真结果如图10~11所示。从仿真图上可以看出,负载突变时,PI-RP控制能迅速响应,在很短时间内谐波补偿指令恢复正常,实现有效谐波补偿和抑制的功效。
4 结语
本文提出和设计了基于PI-RP复合控制策略的船用单相APF,并通过MATLAB/Simulink建模和仿真实验验证了复合控制策略稳态精度高,动态响应快,补偿性能良好。单相APF对舰船电网负载侧引起的谐波电流能有效抑制和滤除,具有一定工程适用性,将能成为舰船谐波干扰抑制和舰船总体电磁兼容设计及控制的有力工具。
[1]姜齐荣,赵东元,陈建业.有源电力滤波器——结构·原理·控制[M].北京:科学出版社,2005.
[2]AKAGI H.New trends in active filter for power conditioning[J].IEEE Trans on Industry Applications,1996,32(6):1312-1322.
[3]谢少辉,杨淑英.基于瞬时无功功率理论谐波检测方法的研究[J].电力科学与工程,2010,26(2):22-27.XIE Shao-hui,YANG Shu-ying.Research on measurement methods for detecting harmonics based on instantaneous reactive power theory[J].Electric Power Science and Engineering,2010,26(2):22 -27.
[4]万百五,韩崇昭,蔡远利.控制论——概念、方法与应用[M].北京:清华大学出版社,2009.
[5]张树全,戴珂,李直.单相并联型有源电力滤波器电流复合控制[J].电力电子技术,2010,44(3):22 -24.ZHANG Shu-quan,DAI Ke,LI Zhi.Current compound control strategy for sing-phase shunt active power filter[J].Power Electronics,2010,44(3):22 -24.
[6]陈玉庆,武玉强,蔡彬.基于电流环复合控制的有源电力滤波器[J].电力自动化设备,2009,29(10):43 -49.CHEN Yu-qing,WU Yu-qiang,CAI Bin.Active power filter based on compound control of current loop[J].Electric Power Automation Equipment,2009,29(10):43 -49.
[7]张国友,郭小程.基于Matlab对直流脉冲发电机系统的建模仿真[J].舰船科学技术,2009,31(3):135 -138.ZHANG Guo-you, GUO Xiao-cheng.Modeling and simulation of DC pulse dynamo system based on matlab[J].Ship Science and Technology,2009,31(3):135 -138.
猜你喜欢
云南电力技术(2021年6期)2022-01-18
载人航天(2021年5期)2021-11-20
水上消防(2019年3期)2019-08-20
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
电子制作(2018年9期)2018-08-04
电子制作(2017年2期)2017-05-17
中国水运(2015年11期)2015-12-08
湖南大学学报·自然科学版(2014年3期)2014-12-30
中国航海(2014年1期)2014-05-09