生物软组织切割过程建模
2011-09-07 09:02胡中伟
中国机械工程 2011年17期
胡中伟 张 璧
1.湖南大学,长沙,410082 2.康涅狄格大学,Storrs,康涅狄格,06269
0 引言
微创外科手术因可大大减小手术过程中所造成的损伤而受到广泛关注,近年来已取得了重要的发展。目前,已有很多外科手术过程采用微创手术治疗技术,例如胆囊切除术[1]、疝修补术[2]、结肠手术[3]和经皮冠状介入治疗手术等。这些手术已完全改变了传统手术方式,医生通过操作各种器械在组织器官上进行手术,而不需要直接用手接触或直接用眼睛观察这些组织器官。例如具有高度创伤的开胸手术、开胸心脏瓣膜修复手术和心脏瓣膜置换手术等都可采取经皮导管方法进行微创手术治疗。微创手术已经被证明具有很好的治疗效果,能够降低死亡率,减少并发症,使患者较快康复,提高患者生活质量。然而,微创手术过程需要进行一些复杂的操作来对组织进行解剖、切除和修复,包括利用微创手术方法进行诊断。这些都要求医生对工具与组织相互作用时组织的反应特性进行详细的了解。而工具与组织之间的触觉(力和视觉)反馈信息的不足是微创手术发展的一个制约因素[4]。
外科手术仿真系统被认为可像教练机培训飞行员一样用来培训外科医生,学生可以利用外科手术仿真系统在一个可控的环境中训练自己而无需在动物或人体上进行训练。仿真系统允许反复训练并纠正操作失误而不会像在真实手术中那样对病人造成伤害。利用动物或病人对学生进行培训,风险大,成本高,而利用外科手术仿真器对医生进行培训没有任何风险且可以大大降低培训成本。外科手术仿真器是一个触觉补偿装置,医生能够通过它感受到外科手术力、工具位置和触觉信息等而不会造成组织损伤[5]。外科手术仿真器有望大大缩短外科医生的培训周期,提高培训效率,改善培训效果。除了培训方面的应用外,外科手术仿真器也被一些有经验的外科医生用于开发新的外科技术和练习新技术以便改善外科手术技能[6]。然而,设计和发展一个先进的高仿真度外科手术仿真器需要对组织器官与工具之间的相互作用建立精确的关系模型,这不仅需要了解软组织的变形特性,也需要对软组织在各种外科切割手术中的反应特性进行研究。
外科手术的核心任务是“切和锯”。定量分析和理解软组织切割过程是实现微创机器人外科手术的关键之一。近年来已有一些学者对软组织切割展开了实验和理论研究。Chanthasopeephan等[7-8]对肝脏组织进行了切割实验,研究了切割速度和刀具倾斜角度对切割力的影响,并建立了有限元模型来模拟刀具与组织之间的相互作用。Mahvash等[9-10]对生物材料进行了剪切实验,测量了剪切力,并基于接触力学和断裂力学理论建立了剪切力的解析模型。Valdastri等[11]搭建了一个可测量的实验平台,该实验平台可以测量x、y、z三个方向上的切割力,并对猪的肺、肝和肾脏组织开展了切割实验研究。然而,据我们所知,目前还没有关于心脏组织切割方面的研究。
本文首次开展了以主动脉为代表的心脏组织切割实验研究,分析了其切割特性,从能量角度对切割过程进行了分析,并建立了切割力模型。本文的研究成果对机器人微创手术和外科手术仿真系统的发展具有重要意义。
1 实验装置与试验过程
1.1 实验准备
从屠宰场购买新鲜猪心脏(6~9个月大的猪)用带冰块的箱子运送至实验室。随后将动脉管从心脏上切割下来,用手术刀小心地将动脉管壁外侧脂肪切除。去除脂肪后的动脉管壁沿轴向切成尺寸约为30mm×20mm的试样。将切割好的试样浸泡在已配置好的盐水中,随后进行切割实验,或保存在-20℃冷藏室内以便以后进行实验,所有切割实验都保证在7天之内完成。采用Mitutoyo非旋转测量仪对组织试样5个不同位置点进行测量,取其平均值为试样的厚度值。
1.2 实验装置
自行设计和制造了一台生物软组织切割装置,主要包括三个直线电机、两个测力传感器和一套组织夹持装置,如图1所示。组织试样的两端用夹板夹持住,两个直线电机沿相反方向运动将试样拉直,并施加一定的拉伸力即为初始夹持力,拉伸方向与切割方向垂直。为防止被夹试样脱落,在夹板表面贴一层粗砂布。用一个力传感器对初始夹持力进行测量,其大小可以通过调节两个直线电机的反向运动来控制。为了尽量减小生物软组织黏弹性的影响,在初始夹持力的施加过程中,选取较小的拉伸速度15mm/min。11号Bard-Parker外科手术刀被用于切割实验,由第三个直线电机带动刀具做直线运动对组织试样进行切割,该装置的切割速度可以在0~150mm/min之内任意调节。在切割实验过程中,对刀具位移和切割力进行实时测量。每次切割完成后,用酒精纸巾擦去黏附在刀刃表面的微细纤维和脂肪,以保持刀刃锋利。在切割过程中,组织试样被置于室温空气中,由于在切割前试样被浸泡在盐水中,而切割过程较短,约为2~3min,因此,在切割过程中不会因组织表面水分丢失而引起组织性能的变化。
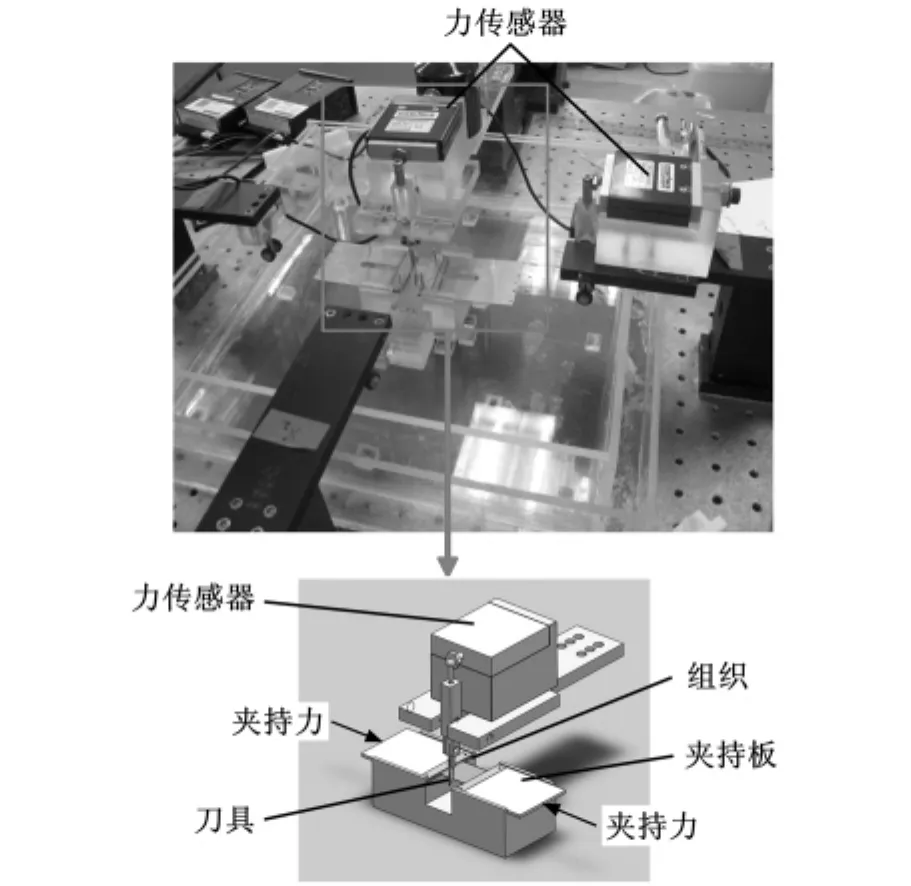
图1 生物软组织切割装置
1.3 实验参数
在生物软组织的切割过程中,组织夹持条件对切割过程有重要的影响,组织夹持条件主要包括组织初始夹持力和组织夹持距离。对猪主动脉组织在不同夹持条件下开展切割实验。在所有实验中,刀具都沿轴向方向进行切割。组织初始夹持力分别为0、2N、4N和6N,组织夹持距离分别为2mm、5mm、10mm、15mm和20mm,切割速度为30mm/min。通过筛选以保证组织试样厚度基本一致,大约为2.1mm。
2 切割力
在所有的切割实验中,切割力都呈现相同的曲线形式,如图2所示。切割力在组织未被切破前随刀具位移非线性增大,呈典型的J形曲线关系,当切割力增大到一定程度时,组织被切破,切割力迅速减小,随后切割过程相对比较平稳,切割力在较小的范围内波动,呈现增大-减小的波浪形式。
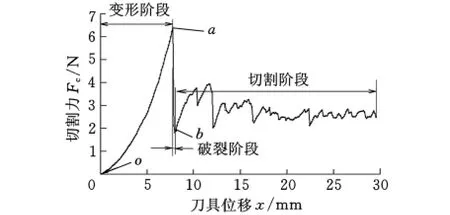
图2 实验测量切割力曲线
整个切割过程可分为三个阶段:变形阶段、破裂阶段和切割阶段(图2)。变形阶段是刀具开始接触组织到组织被切破的阶段,即从接触点o到破裂点a。在这个阶段,刀具只是挤压组织变形,没有切割发生。刀刃前端组织被挤压,组织内纤维被拉伸,刀具所做的功以弹性应变能的形式存储在组织试样中。随着刀具与组织间相互作用力的增大,刀刃处组织所承受的应力也逐渐增大,当达到组织破裂应力时,组织破裂,在破裂点a处的切割力被称为破裂切割力Fa。在破裂点a时,组织开始产生裂纹,并在瞬间迅速扩展,这一过程被称为破裂阶段,即从破裂点a到破裂完成点b。在破裂阶段,刀具与组织之间的作用力迅速减小,从最大峰值Fa减小到最小峰值Fb,在变形阶段所存储的弹性应变能被迅速释放,提供给组织破裂产生新表面所需要能量。由于破裂阶段时间很短,在这个阶段刀具位移很小,刀具对组织所做的功可以被忽略,在破裂阶段产生新表面所需的能量全部来自变形阶段存储的弹性应变能。变形阶段存储的弹性应变能越多,则在破裂阶段组织破裂的长度越长。由于在破裂阶段组织已经被切开,存在一个缺口,故在切割阶段,切割过程比较平稳,切割力较小,且在较小范围内波动。在切割阶段,刀刃前组织存在一个弹性变形区,存储了一定量的弹性应变能。随着刀具的移动,弹性变形区也向前移动。由于在切割阶段切割过程比较平稳,变形区没有明显的变化,变形区内所存储的弹性应变能也在一个较小范围内波动。直到切割结束前,这种弹性应变能被释放,提供给切割组织产生新表面所需的能量。在切割阶段,切割组织产生新表面所需能量主要来自刀具的做功,也有部分来自夹持能的释放。
3 能量分析
在切割过程中,外部对组织提供的能量主要来自两部分,即施加初始夹持力做功而引起的初始夹持能和刀具做功所提供的切割能。而切割过程中所消耗的能量主要分三部分,分别为组织变形所存储的弹性应变能、组织被切开产生新表面所吸收的表面能和在切割过程中引起非弹性应变所消耗的非弹性应变能。因此,根据准静态断裂能量平衡方程[12],在切割过程中,能量平衡方程为

其中,Wc为切割能;Wh为初始夹持能;Λ为刀刃前端组织变形区内存储的弹性应变能;Jc描述了材料断裂反抗特性即断裂韧性,dA表示产生新裂纹表面的面积,JcdA则被用于计算材料产生新表面时所吸收的表面能;Γ表示由于材料的黏弹性及在切割过程中所引起的塑性变形、微裂纹和造成组织结构改变等因素所消耗的能量,统称为非弹性应变能。
在切割过程中所消耗的非弹性应变能很难进行测量,在计算过程中,忽略非弹性应变能。因此,可将式(1)写成

假设在切割过程中,在较短时间Δt内,刀具位移为Δx,组织被切开距离为Δl,切割产生新表面吸收的能量为ΔWs,刀具所做功为ΔWc,所释放的夹持能为ΔWh,组织弹性应变能的改变为ΔΛ。根据准静态情况下能量平衡关系可知

式中,Fc为切割力。
由于对组织施加了一定的初始夹持力Fh,故在切割开始之前,组织内已经存储了一定能量。在切割过程中,随着组织被切破,初始夹持能会逐步地释放出来。假设初始夹持能随组织被切破的长度成线性关系释放,则在Δt时间内,组织切破长度Δl所释放出的夹持能为

式中,L0为试样沿切割方向的长度;h0为组织试样的厚度。
因此,式 (3)可写成


4 切割过程建模
4.1 变形阶段
在变形阶段,由于组织未被切破,没有能量被消耗用于产生新表面,组织内的夹持能也未被释放。如果不考虑非弹性应变的影响,则刀具所做的功全部以弹性应变能方式存储在组织内,因此,式(3)中ΔWs=0和ΔWh=0。组织未切破,则意味着Δl为零,则式 (8)可简化为

生物软组织在小变形情况下表现出线弹性反应特性[13]。然而,在切割实验中,可以明显地发现组织在破裂前发生大的变形,实验所测的切割力在变形阶段显示出非线性J形曲线关系。因此,可用非线性方法对组织破裂前的切割力进行建模。Simone等[14]用二阶多项式对用针刺猪肝脏组织破裂前的切割力进行了拟合。Kendall等[15]则用指数函数来描述生物软组织材料的这种非线性应力-应变关系。本文采用指数函数对变形阶段这种J形切割力曲线进行拟合,指数函数关系式如下:

式中,x为刀具位移;α和β是两个与组织材料特性和切割参数相关的系数。
切割参数包括初始夹持力、组织夹持距离、切割速度、刀具倾斜角度和刀刃几何形状等。这里只研究了初始夹持力和组织夹持距离对指数函数α和β的影响,其他因素的影响规律有待进一步研究。
用式(10)对不同初始夹持力和组织夹持距离情况下变形阶段的切割力进行拟合,如图3和图4所示。可以看出,上述指数函数能很好地对不同初始夹持力和组织夹持距离情况下变形阶段的切割力进行拟合。对于不同切割条件,指数函数中系数α和β的值是不同的,如表1和表2所示。
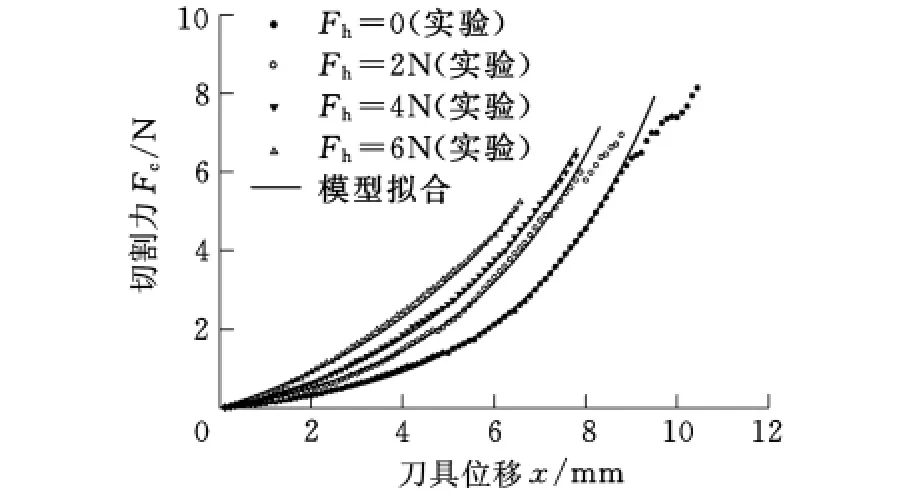
图3 不同初始夹持力Fh条件下,变形阶段切割力的实验曲线和模型拟合曲线比较

图4 不同组织夹持距离lh条件下,变形阶段切割力的实验曲线和模型拟合曲线比较

表1 不同初始夹持力情况下拟合指数函数系数

表2 不同组织夹持距离情况下拟合指数函数系数
4.2 破裂阶段
破裂阶段时间非常短,刀具几乎不与组织发生能量交换,在变形阶段所存储的弹性应变能瞬间迅速释放,破裂阶段所产生的裂纹长度取决于变形阶段组织内所存储的能量大小。在组织破裂前,即在破裂点处组织内存储的弹性应变能最大,其值为

假设在破裂阶段组织被切破的长度为Δl,则在破裂过程中能量的转换关系如下:

等式左边表示破裂前组织内存储的能量,由切割能和初始夹持能组成。等式右边则分别为组织破裂产生新表面所吸收的能量、剩余夹持能和破裂阶段结束时刀刃前端组织变形区内所存储的弹性应变能Λ′。破裂阶段结束后便进入切割阶段,从前面分析可知,在切割阶段刀刃前端组织变形区所存储的弹性应变能几乎不变。因此,可以认为Λ′与切割阶段刀刃前端变形区内所存储的弹性应变能相同。
在切割实验过程中,当刀具到达切割阶段某位置c点时,将刀具停止,倒退,直到刀具与组织不再接触。退刀时力与位移曲线如图5中曲线cd所示。随后刀具继续向前运动,继续切割组织,切割力曲线如图5中实线所示。因此,在c点处刀刃前端组织变形区内所存储的弹性应变能可用图5中阴影部分面积表示,或者对切割力曲线cd进行积分求得

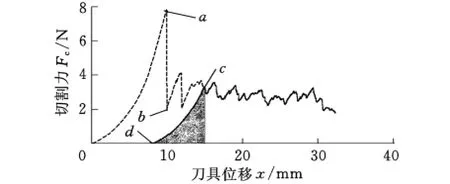
图5 切割力与刀具位移关系曲线

4.3 切割阶段
在切割阶段,刀刃前端组织变形程度变化很小,只是这种弹性变形区随刀具的运动而向前移动,在变形区所存储的弹性应变能基本不变,因此,在切割阶式 (8)在切割阶段可写为

在切割阶段,Δx近似等于Δl,式(14)可进一步简化为

从式(15)可以看出,如果不考虑组织材料的黏弹性和不均匀性,以及在切割过程中组织皱起现象的影响,在切割阶段的切割力为一定值,但随初始夹持能的增大而减小。而初始夹持能随初始夹持力的增大而增大,因此,随着初始夹持力的增大,在切割阶段的切割力减小,这是合理的。
5 模型验证
通过对生物软组织切割过程进行分析,建立了各阶段的切割力建模如下:

破裂阶段的切割力则认为是从破裂切割力直线减小到切割阶段切割力大小。
对一定条件下实验所得切割力曲线和模型所得切割力曲线进行比较,以验证模型的正确性。选取在初始夹持力为4N、组织夹持距离为10mm情况下的实验切割力曲线,如图6中虚线所示。采用指数函数对变形阶段切割力进行拟合,拟合系数α=0.95,β=0.265。我们在前期研究中,对猪主动脉组织的断裂韧性进行了测试,其值在0.8~1.8kJ/m2之间。在计算组织断裂韧性的过程中忽略了测试过程中所消耗的非弹性应变能,断裂韧性值越大意味着在测试过程中所消耗的非弹性应变能越多。因此,在计算切割阶段的切割力时,组织材料的断裂韧性应选较大值为1.5 kJ/m2。将断裂韧性值代入式(16),计算出切割阶段切割力为2.73N。通过模型所得的切割力曲线如图6中实线所示。从图6中可以发现,模型所得切割力曲线与实验切割力曲线相吻合。
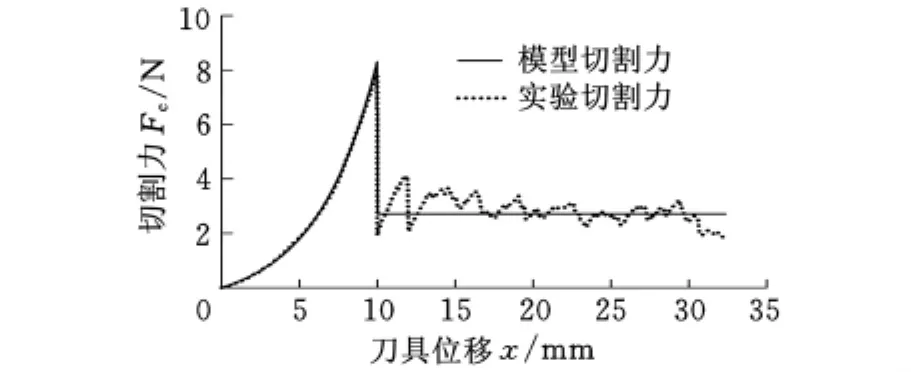
图6 模型所得切割力与实验所得切割力比较
6 结语
对猪主动脉组织进行切割实验,分析了软组织的切割特性。从能量角度对切割过程进行了分析,将整个切割过程分为变形阶段、破裂阶段和切割阶段。根据各个阶段能量平衡关系建立了各个阶段切割力模型。模型所得切割力曲线与实验测得的切割力曲线吻合很好,证明了对软组织切割过程的建模是正确的。本文虽然是对猪主动脉壁组织切割过程的建模,但对切割过程的分析和建模方法也适合其他生物软组织材料。
本文研究结果有助于理解生物软组织切割特性及其切割机理,为改进外科手术工具和改善手术情景提供理论指导,为微创外科手术和外科手术仿真系统的发展提供实验基础和理论模型。
[1]Brewer R J,Mentzer R M,Deck J D,et al.An in Vivo Study of the Dimensional Changes of the Aortic Valve Leaflets during the Cardiac Cycle[J].Journal of Thoracic and Cardiovascular Surgery,1977,74:645-650.
[2]Liem M S L,van der Graaf Y,van Steensel C J,et al.Comparison of Conventional Anterior Surgery and Laparoscopic Surgery for Inguinal-hernia Repair[J].New England Journal of Medicine,1997,336(22):1541-1547.
[3]Peters W R,Bartels T L.Minimally Invasive Colectomy:Are the Potential Benefits Realized?[J].Diseases of the Colon and Rectum,1993,36(8):751-756.
[4]Okamura A M.Haptic Feedback in Robot-assisted Minimally Invasive Surgery[J].Curr.Opin.Urol.,2009,19(1):102-107.
[5]Rosen J,Hannaford B,Macfarlane M P,et al.Force Controlled and Teleoperated Endoscopic Grasper for Minimally Invasive Surgery-experimental Performance Evaluation[J].IEEE Trans.Biomed.Eng.,1999,46:1212-1221.
[6]Fischer G,Akinbiti T,Saha S,et al.Ischemia and Force Sensing Surgical Instruments for Augmenting Available Surgeon Information[J].Proc.,IEEE Biorobotics.Pisa,Italy,2006:1030-1035.
[7]Chanthasopeephan T,Desai J P,Lau A C W.Measuring Forces in Liver Cutting:New Equipment and Experimental Results[J].Ann.Biomed.Eng.,2003,31:1372-1378.
[8]Chanthasopeephan T,Desai J P,Lau A C W.Modeling Soft-tissue Deformation Prior to Cutting for Surgical Simulation:Finite Element Analysis and Study of Cutting Parameters[J].IEEE Trans.on Biomed.Eng.,2007,54(3):349-359.
[9]Mahvash M,Hayward V.Haptic Rendering of Cutting:a Fracture Mechanics Approach[J].Haptics-e,the Electronic Journal of Haptics Research,2001,2(3):1-12.
[10]Mahvash M,Voo L M,Kim D,et al.Modeling the Force of Cutting with Scissors[J].IEEE Transactions Biomedical Engineering,2008,55(3):848-856.
[11]Valdastri P,Tognarelli S,Menciassi A,et al.A Scalable Platform for Biomechanical Studies of Tissue Cutting Forces[J].Meas.Sci.Technol.,2009,20:1-11.
[12]Atkins A G,Mai Y W.Elastic and Plastic Fracture:Metals,Polymers,Ceramics,Composites,Biological Materials[M].New York:Ellis Horwood Limited,1985.
[13]Fung Y C.Biomechanics:Mechanical Properties of Living Tissues[M].2nd ed.New York:Springer-Verlag,1993.
[14]Simone C,Okamura A M.Modeling of Needle Insertion Forces for Robot-assisted Percutaneous Therapy[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Washington D C,2002:2085-2091.
[15]Kendall K,Filler K.J-shaped Stress/Strain Curves and Crack Resistance of Biological Materials[J].Phys.D Appl.Phys.,1987,20:1596-1600.
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
军事文摘(2021年18期)2021-12-02
军事文摘·科学少年(2021年9期)2021-10-13
家庭影院技术(2020年2期)2020-03-25
制造技术与机床(2019年11期)2019-12-04
模具制造(2019年4期)2019-06-24
制造技术与机床(2017年7期)2018-01-19
中国医药指南(2017年3期)2017-11-13
发明与创新(2016年5期)2016-08-21
中国继续医学教育(2015年6期)2016-01-07