
供压状态影响操纵台通道灯亮灭的机理分析
2011-09-22 05:35张清
长沙航空职业技术学院学报 2011年3期
张 清
(国营芜湖机械厂,安徽 芜湖 241007)
飞机通电和供压时,通道灯时亮时灭,状态多种,特别是未供压时,因不同状态,液压系统良好状态信号缺失产生故障信息不同,从而影响座舱操纵台ПУ-220/353操纵台上故障通道灯的亮灭。在电传操纵系统通电检查时,在未加液压或当液压未加到设定压力情况下,接通“倾斜阻尼”电门时,ПУ-220上的Ⅰ、Ⅱ、Ⅲ通道灯并不闪亮,只在接通“航向阻尼”电门时,电传操纵系统ПУ-220面板上的Ⅰ、Ⅱ、Ⅲ通道灯会亮,当液压系统压力达到设定要求(大于140 kgf/cm2)后,通道灯会熄灭,如表1所示。

表1 供压状态与通道灯亮灭

4断通断断亮灭灭灭5断断通断灭灭灭灭6 断 断 通/断通亮亮亮灭7 断 断 通/断断灭灭灭灭8通断通/断通亮亮灭灭9 断 通 通/断断灭灭亮灭
通道灯亮灭反映俯仰、倾斜、航向通道的故障信号,液压系统良好信号也输入到各通道中,参与监控系统故障诊断。本文从通道灯亮灭与故障表决的关系、液压信号的产生传输故障信号的表决,通过电路分析,详细阐述了液压系统供压状态影响座舱ПУ-220/353操纵台通道灯亮灭的工作机理。[1]
1 通道灯亮灭与故障表决
通道灯亮灭与4余度俯仰通道、3余度倾斜通道、3余度航向通道故障表决有关,也就是说俯仰、倾斜、航向通道故障都是通过ПУ-220操纵台上4个灯来指示,但各通道监控电路设计不相同。要弄清楚接通航向阻尼电门后产生Ⅰ、Ⅱ、Ⅲ通道灯燃亮工作机理,必须分别弄清楚俯仰、倾斜、航向通道故障表决与液压系统良好信号的关系。
俯仰通道表决系统共分五级,包括四级电气表决和一级机械表决,机械表决在平尾舵机内部,四级电气表决均在电传计算机内部,依次是ВКШ、ВТ1、ВТ2、УСл(УСпр),均配置在相应的插件板中。在倾斜通道中,设置了四级表决器,前三级为电信号表决器,依次是 ВКР、ВДС、УСЛ(УСпр),均配置在相应的插件板中,第四级是四余度左(右)平尾舵机,为机械表决,设置在舵机内部。在航向通道中,设置了三级表决器,前二级是 ВН、УСНЛ(УСНпр),为电信号表决器,配置在的插件板中,第三级是三余度方向舵机,为机械表决,设置在舵机内部。[2]
液压系统故障信号是通过计算机壳体电路加到УС放大器进行故障表决的,也就是说液压系统故障信号只参与通道电路输出级的表决。
2 液压系统良好信号的产生
当液压系统正常或第1、2液压系统压力均大于压力继电器10-У24、12-У24(见图1)规定值140MPa时,压力继电器 10-У24、12-У24、13-У24、15- У24 触点断开,液压继电器14- У24、16-У24失电,常闭触点接通各通道“Х3”连接器的“44”、“45”脚。通过电传计算机壳体“45”脚连接到УС -80放大器的“А5”(或“Б5”)或 УС -79放大器的“Б4”,输出液压系统良好信息。“44”脚则是连向各通道БП电源+27V信号。图1中只列出Ⅰ、Ⅱ、Ⅲ、Ⅳ通道液压与电传操纵系统俯仰通道的交联关系。
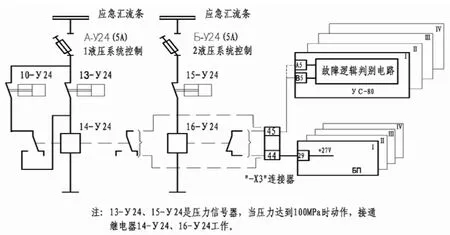
图1 液压系统良好信号线路示意图
第1、2液压系统压力降到小于压力继电器10-У24、12-У24规定值140MPa,又大于13-У24、15-У24规定值100MPa时,压力继电器10-У24、12-У24触点接通,13-У24、15-У24触点断开,液压继电器14-У24、16-У24保持得电状态,液压系统良好信号仍存在。
只有第1、2液压系统压力降到小于100MPa时,压力继电器10-У24、12-У24、13-У24、15-У24触点均接通,液压继电器14-У24、16-У24失电,液压系统良好信号消失。[3]
3 俯仰通道液压故障表决
第1液压系统压力不足100MPa或没有压力故障时,第1液压系统液压继电器14-Э24得电,常闭触点断开,+27V不能送到Ⅰ、Ⅲ通道УС-80放大器(УСл、УСп)的“А5”端。同样,第2 液压系统压力不足100MPa或没有压力故障时,第2液压系统液压继电器16-Э24得电,常闭触点断开,+27V不能送到Ⅱ、Ⅳ通道,对应的УС-80放大器(УСл、УСп)的“Б5”端。
这里要指出的是,根据机上液压系统的通道供压设计不同,1通道的УС-80上А5有信号输入,Б5端无信号输入,而4通道的УС-80上Б5有信号输入,А5端无信号输入,2、3通道的УС-80上А5、Б5都有信号输入,如图2所示。

图2 俯仰通道的故障输出电路图
正常供压时,V62导通,V63截止,从电路看,“А5”(或“Б5”)、+27V КВ РМ 信号只要有一个存在,V62都导通,只有当V54截止时,УС-80放大器才会向УЛ-98输出故障信号,V54截止与否此时就取决于“故障逻辑电路”输出。当+27V КВ РМ信号消失,“故障逻辑电路”会使得V54截止,УЛ-98逻辑装置中的“非门”电路中提拉电阻对电容的充电,使得有高电平故障信号输入到УЛ-98逻辑装置。需要说明的是,+27V КВ РМ信号的消失是由于舵机通道偏差,活塞杆相对运动量不同,使舵机故障通道内微动电门开路造成的。
通电1ГС、2ГС液压系统未供压时,平尾前缘在最下位置,各通道活塞由于通道间活塞均处于没有压力作用状态,活塞杆处于一个极端,未呈现有相对位移,则 +27V КВ РМ 信号仍存在,V62导通,V63截止,则没有故障信息输出,无通道故障灯亮。
当2ГС液压系统未供压,由于平尾舵机2通道液压切换由1ГС 供压,1、2、3通道 УС -80上 А5(Б5)有液压 +27V信号输入,4通道 УС-80上А5没有液压+27V信号输入,由于有1ГС液压系统供压,平尾回中立,造成4通道活塞筒与活塞杆的相对运动,舵机内微动电门触点被断开,+27V КВ РМ信号消失,产生4通道灯亮。当1ГС液压系统未供压,舵机3通道液压切换由2ГС供压,2、3、4通道УС-80上А5(Б5)有液压+27V信号输入,1通道УС-80上А5没有液压+27V信号输入,同样由于有2ГС液压系统供压,平尾回中立,造成1通道活塞筒与活塞杆的相对运动,舵机内微动电门触点被断开,+27V КВ РМ信号消失,产生1通道灯亮。
当液压恢复到正常压力后,由于液压使得活塞与活塞杆恢复到中立位置(对应平尾零位),舵机内微动电门触点恢复到常闭状态,+27V КВ РМ信号再现,所以这时1(或4)通道灯熄灭,恢复正常。[4]
4 航向通道液压故障表决
当航向通道在液压系统压力不足100MPa或没有压力故障时,由于液压继电器14-Э24和16-Э24得电,常闭触点断开,УС-79放大器板“Б4”端无+27V液压系统良好信号,使得V31截止V32导通,如图3所示。

图3 航向通道故障输出电路图
接通“航向阻尼”电门后,+27V才被送到ВН航向计算机板,这时,+27VВН存在,V34导通,与非门输出高电平,造成V30导通,当液压系统呈现故障,良好信号消失时,V32的导通,会直接使V28截止,УЛ-99逻辑装置中的“非门”电路中提拉电阻对电容的充电,使得有高电平故障信号输入到УЛ-99逻辑装置。
当未接通“航向阻尼”电门时,液压良好信号消失,V32导通,+27V ВН不存在,“与非门”输出低电平,V30截止,由于有+5V的存在,V28仍为导通状态,不产生故障灯信号。所以,未供压时,接通“航向阻尼”电门时,ПУ-220上的Ⅰ、Ⅱ、Ⅲ通道灯会闪亮。
5 倾斜通道液压故障表决
接通“倾斜阻尼”电门时,ПУ-220上的Ⅰ、Ⅱ、Ⅲ通道灯并不闪亮,这是因为倾斜通道电路分成两个部分即不可断开部分和可断开部分,可断开部分电路通过接通“倾斜阻尼”电门接入,这部分电路中3个通道ВК倾斜计算机故障表决信号与液压系统信号无关,不能产生ВК倾斜计算机故障信号。所以,接通倾斜通道在液压故障时操纵台ПУ-220上没有通道灯燃亮。
6 结论
通过电路分析发现,俯仰通道УС-80放大器板和航向通道УС-79放大器板中监控电路不同,液压系统造成的故障信号,产生故障信号机理不同,座舱操纵台ПУ-220/353操纵台上故障通道灯的亮灭随之不同。
某型飞机监控系统将液压系统故障对方向舵机的影响,设计成直接表决成故障,方便飞行员在故障复位无效情况下,可以通过断开“航向阻尼”电门来断开故障的航向通道,还可以通过断开“倾斜阻尼”电门,断开故障的倾斜通道。[5]笔者认为,这是由于平尾的控制在整个飞机主动控制技术中的重要作用决定的,平尾操纵不仅能完成俯仰通道的操纵,还能通过差动操纵实现飞机的横滚与偏航操纵。因此,除尽可能保证俯仰通道的安全余度外,为方便驾驶员区别处理俯仰、倾斜、航向三通道的故障,电传操纵系统监控系统对故障的倾斜通道与航向通道通过电门直接断开,减少俯仰通道故障信息误判读,防止错误处置故障通道而影响任务的完成。俯仰通道监控电路对液压波动造成的假性故障,可以通过按压通道灯钮来复位,而且平尾舵机2、3通道液压供压设计成互相切换,避免因为均值比较表决设计造成误报警,正常情况下1ГС、2ГС系统各供应两个通道,2、3通道液压供压可以切换,这样良好供压通道数目为三个,就不会将良好通道表决为故障通道。
[1]《航空工艺装备设计手册》编写组.航空工艺装备设计手册[M].北京:国防工业出版社.1979.
[2]魏瑞轩.苏二七型飞机飞行导航与控制系统[M].西安:空军工程学院,1998.
[3]СЛСТЕТМЫ ДНСТАНЦИОННОТЩ УПРАВЛЕНИЯ СДУ -10С、СДУ -10У6С1.600.084 -01РЭ 1986.
[4]高金源.飞机电传操纵系统与主动控制技术[M].北京:北京航空航天大学出版社,2005.
[5]宋翔贵.电传飞行控制系统[M].北京:国防工业出版社,2003.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
直升机技术(2021年4期)2022-01-12
新世纪智能(高一语文)(2021年3期)2021-07-16
自动化学报(2019年6期)2019-07-23
民用飞机设计与研究(2019年4期)2019-05-21
民用飞机设计与研究(2019年4期)2019-05-21
大飞机(2018年1期)2018-05-14
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
电子制作(2017年24期)2017-02-02
