
取料机回转实现无极变速
2011-10-26 03:27徐晓磊河北理工大学神华天津煤炭码头有限公司天津300452
中国科技信息 2011年7期
徐晓磊 河北理工大学;神华天津煤炭码头有限公司,天津,300452
取料机回转实现无极变速
徐晓磊 河北理工大学;神华天津煤炭码头有限公司,天津,300452
本文介绍了变频器技术在取料机中的应用,它功能强大,可以很好地控制取料机在作业过程中的回转速度,实现无极变速。
取料机;变频器;回转机构;变频调速;主令控制器
变频调速系统一般有电动和发电两种运行状态,具体到煤场,斗轮堆取料机在堆、取料作业时,尤其是取料作业时,悬臂回转角度有一定的区域限制,斗轮堆取料机悬臂回转为往复运动,每次循环为向左加速-向左减速-停止-向右加速-向右减速-停止。如果此时电动机处于加速状态,回转电动机的作用力大于悬臂的阻力,电动机正常工作;当回转电动机转到额定转速后,由停止-向左加速(或停止-向右加速)过渡时,由于悬臂回转机构受原煤阻力和悬臂重力的作用,会对回转电动机产生一个反向加速度力,这就要求回转电动机通过变频调速、减小频率来实现减速。
1.取料机回转机构的组成
取料机回转机构所采用的变频器是低压交-直-交电压源型变频器,由主回路和控制回路两部分组成,如图1所示。在主回路中,整流电路将交流电变换成直流电,直流中间电路对整流电路的输出信号进行平滑滤波,逆变电路将逆变成交流电。控制回路完成对主回路的控制,以及对进行转矩计算的CPU和一些相应的电压、电流检测回路的控制。变频器的控制方式为PWM正弦曲线控制方式,即动态转矩矢量控制方式,由控制系统高速计算电动机驱动负载所需功率、最佳控制电压和电流矢量,最大限度地发挥电动机输出转矩的作用。
回转有联动台、半自动和就地运行三种控制方式。在取料机司机室内可监视回转转速及实现半自动或手动操作,也可直接通过变频器键盘面板或外部通信接口进行点动运行操作。变频器具有低速软启动功能,可平滑地大范围调节回转电动机转速。变频器与取料机PLC进行速度控制信号交流的基本回路为0~10V直流模拟回路,当速度控制信号输入变频器时,将改变变频器的输出频率,即改变回转电动机的转速。

图1 斗轮机悬臂回转机构变频器的组成
2.系统工作原理
2.1 系统组成
取料机的回转变频装置和电气控制系统集成在一个电气柜内,通过接线端子与母排与原系统连接,主要元件叙述如下:
变频器:6SE7031-2EF60+G95+K01+K11(55kw)
制动单元:6SE7028-0ES87-2DA1
制动电阻:10KW 4欧 做1箱,并成1户内柜
输入电抗器:K119-421
输出电抗器:K119-423
电动机: B21R 180L 4 SMG HB TWS HW 380/660V 44/25.5A 22KW 1470r/min
变频器内置多种保护,对包括直流母线过/欠电压、变频器过载、电动机丢转失步、装置超温、输入电源故障以及自身电路板损坏等多种故障进行监控。与此对应,拥有近200种故障和报警代码,当设备发生故障时,该装置可及时停止运行,防止事态恶化。并通过液晶面板(PMU的一部分)显示故障代码,提高查找故障的效率。
2.2 系统原理
改造后的取料机的回转速度变化为1m/min的低速至30m/min的高速。速度转换为无极变速,有向东和向西两种运行方向。它主要有两种操作方式:一种操作方式是司机操作,主要是煤炭码头公司取料机用于取料作业。当司机操作主令开关时,有两路信号同时发出:一路是开关量,直接输入到PLC程序,通过PLC程序处理,综合多种条件(包括限位开关、碰撞保护开关等)最终发出,指令传送给变频器,令变频器启动,从而取料机进行左转或右转。另一路是0~10V变化模拟量,它由主令开关所附电位器产生,随主令开关的行程平滑变化,输入到变频器,决定着动作的运行速度。各输入点的功能可通过设定的参数来确定。当变频器从输入端子接到运行指令后,根据输入状态和预先设定的参数,就由内部闭环电子线路控制逆变器,利用脉宽调制方法产生所要求的频率、幅值和相序的电压源,驱动电机运行。
另一种操作方式是就地操作,固定的低速运行状态。根据PLC程序中的设置,变频器将输出预置频率值来驱动电机,实现固定低速运行。此方式的变频器启动与方向输入情况与司机操作方式类似,主要用于维修,巡视进行大机锚固操作。
3. 系统改造
司机室电气柜的从站机架顺序依次为1756-CNB模块,1756-IB32/B DI9, 1756-IB32/B DI10,1756-IB32/B DI11,1756-IB32/B DI12,1756-IB32/B DI13,1756-IF16 AI2。首先通过控制网,增加型号为1794-ACN15/C,节点号为5的适配器,同时增加模拟量输入输出模块1794-IE4XOE2/B重新组态成新的网络。

图2 1794-IE4XOE2/B模块参数设定
选择我们要在RSLinx中组态的控制网,然后选择OK,系统开始扫描ControlNet上的各个节点,扫描完毕后,发现1794-ACN15/C出现在控制网络上,组态成功,保存数据完成组态。
然后对1794-IE4XOE2/B模块进行模拟量设定,如图2所示。
在取料机司机在进行取料时,是通过操作台上的操作手柄,带动操作手柄里面安装的一个电位器,可以控制变频器的频率在一定频率之间无极变化,从而控制回转电机的转速无极变化,实现取料机左右回转无极调速控制。
取料机回转的操作手柄选用的是MKLC-5-4P-R1的主令控制器,该元件有对应三个开关量信号的操作档位,即两个相反方向的运行挡位和一个停止档位,线号661接接手柄的零位即停止位置,线662接左转低速,线663接右转低速,这三个开关量信号输入给PLC程序。取料机司机操作回转时,PLC接收到手柄信号同时,变频器收到信号,然后控制取料机回转向左向右运动或者停止运动。
取料机回转操作手柄上面的电位器在物理结构上有三个接线抽头,接线时,将中间的抽头接入1794-IE4XOE2/B的输入通道,将其中的电阻两个终端接线抽头分别接线,664接到1794-IE4XOE2/B模块输出的电压0通道,665接到电压1通道。
从停止位置向左或向右滑动手柄时,输入给变频器的模拟电压信号逐渐减小或增大,使电动机的速度逐渐变化。即:
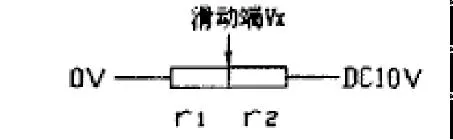
图3 电位器输入给变频器的模拟电压原理图
图3所示为手柄由停止位置向左或向右移动时电位器输入给变频器的模拟电压原理图。由上图可得出公式:

由公式可以计算出电位器滑动端在不同位置输入给变频器的模拟电压值为:

随着手柄的运动,r2的阻值平滑变化,使输入给变频器的模拟电压值Vx作相应的变化,达到无极调速的目的。
4.结束语
按照这种技术方案已经对公司的6台取料机全部进行了改造,改造后,司机对取料机这种回转无极操作方式非常适应,在取料作业的过程中,可以根据自己长期的工作经验,自己掌握取料机回转速度,使取料机的作业效率得到了有效的提高,达到了预期的效果。另一方面,取料机实现平滑的无极变速的同时,对取料机本身也是有益的,减轻了在回转作业过程中由高速突然变成低速,或突然高速左转变为高速右转对于设备本身的冲击,减轻了设备的磨损情况,延长了设备的使用寿命。
[1]鲁庆.变频调速装置在秦煤三期斗轮取料机行走系统中的应用 [J].中国港湾建设.2003(2)
10.3969/j.issn.1001-8972.2011.07.094
猜你喜欢
宝藏(2020年4期)2020-11-05
World Journal of Hepatology(2019年5期)2019-06-20
中国特种设备安全(2019年3期)2019-04-22
摄影之友(影像视觉)(2017年11期)2017-11-27
中国信息技术教育(2016年23期)2017-01-03
山东工业技术(2016年15期)2016-12-01
凿岩机械气动工具(2016年2期)2016-11-11
中国医疗设备(2013年7期)2013-11-19
计算机应用文摘·触控(2006年10期)2006-11-02
