
精准滴灌施肥监控系统的实现
2011-11-09 07:50聂晶王洪坤岑红蕾李宏伟
石河子大学学报(自然科学版) 2011年1期
聂晶,王洪坤,岑红蕾,李宏伟
(石河子大学机械电气工程学院电气工程系,石河子,832003)
文章编号:1007-7383(2011)01-0111-05
精准滴灌施肥监控系统的实现
聂晶,王洪坤,岑红蕾,李宏伟
(石河子大学机械电气工程学院电气工程系,石河子,832003)
为提高滴灌施肥过程的自动化水平,实时掌握生产过程信息,实施精准作业,设计并实现了一个以 IPC+PLC为中心的精准滴灌施肥监控系统。该系统通过人机界面设置与作物在不同生长阶段的养分需要相匹配的施肥参数,由IPC通过PLC对控制对象的参数作巡回检测并实时显示,根据测得的参数数据由PLC按照PID控制算法运算后获得控制信号量,作用到执行机构,对被控量进行自动调节,可实现滴灌施肥过程的精准监控。
滴灌施肥;自动化;监控;精准;PID控制算法
滴灌施肥属于液体施肥的一种,它是借助滴灌系统,在滴灌的同时将由固体肥料或液体肥料配兑而成的肥液一起输入到作物根部土壤的一种方法。随着我国在农业生产中采用膜下滴灌技术的种植面积不断扩大,滴灌施肥越来越受到大家的关注,在此基础上通过自动监控系统执行变量施肥操作将是提升我国农业技术装备水平的必然要求。
我国目前变量施肥自动控制系统的研制主要集中在田间抛撒施肥领域。王秀等[1]研究了一种与拖拉机配套使用,在 GPS导航系统的帮助下可以按照施肥处方图,通过调整肥料计量装置的转动速度调整肥料量,以实现变量施肥。张书慧等[2]开发了一种基于复杂可编程逻辑器件(CPLD)的变量施肥控制系统。这类系统的作业环境较差,且必须与拖拉机配套使用,成本较高。吕新等[3]针对液体变量控制施肥研发了适用于大田棉花膜下滴灌的比例混合变量施肥系统,可提高肥料利用率10%以上。在施肥决策方面,杨利勇[4]等实现了基于中间件技术的棉田土壤肥力施肥决策系统。
对于已经大面积采用滴灌技术的我国北方地区,可以利用现有的滴灌资源将精准农业中变量施肥技术的思想与滴灌施肥技术相结合,通过对生产过程的自动化管理,实现精准变量施肥自动控制作业。本文介绍一种基于IPC+PLC两级控制结构的精准滴灌施肥监控系统的实现过程,操作人员通过IPC中的人机界面根据施肥配方设定被控参数的给定值,同时对被控参数进行巡检,一方面与设定值进行比较后求得偏差,由PLC按PID控制规律进行控制运算后获得控制信号量,发出控制信号,通过操纵执行机构对被控对象进行自动控制。另一方面使操作人员通过参数的实时显示了解生产过程信息、下达控制指令,并可以进行数据储存及查询。
1 系统的技术方案及工作原理
1.1 技术方案
变量施肥技术体系的核心是根据作物生长实际需要,基于科学施肥方法,确定对作物的变量投入[5]。对于滴灌施肥作业,精准的含义在于实施准确的变量施肥控制,其依据是对施肥地块土壤肥力状况及作物生长实际需求的合理评估,将土壤养分分布图与作物生长信息相结合并考虑目标产量,进行施肥决策[6-9]。在实施过程中,由上位机根据施肥决策处方,下达控制指令,对施肥过程进行监控;下位机控制相应执行机构动作,执行自动化作业过程。
本系统选择IPC作为监控计算机即上位机,选择PLC作为下一级调节器即现场控制器,整个控制系统采用两级控制形式。操作人员通过IPC中的人机界面根据施肥决策下达被控参数的给定值,同时通过PLC对被控参数进行巡检,由PLC按PID控制规律进行运算后发出控制信号,实现闭环自动控制。
1.2 工作原理
控制系统结构示意‘图如图1所示。其中混肥液储罐中的肥液由磷酸钙、氯化钾、碳酸氢铵、磷酸二氢钾、尿素及微量元素等肥料溶解液组成,辅以适当的酸液及碱液。肥液的配兑由操作人员依据作物的施肥配方参数表,通过监控程序界面下达肥液配兑指令,下位机驱动单个肥液溶解罐及进水管的电磁阀来完成。在肥液配兑过程中,下位机通过传感器采集混肥灌中的肥液配兑信息,上传至上位机通过人机界面实时显示,由操作人员实时监控。肥液配兑完成后通过施肥泵泵入混肥管道进而进入灌溉系统主管道,通过支路管网施给作物,每一级过程中均有调节阀连接,均可由操作人员进行实时监控。

图1 控制系统结构示意图Fig.1 Construction of the control system
施肥作业时对灌溉系统主管道中的肥水进行采样,由 IPC通过 PLC对控制对象的参数(EC/PH值、阀门流量、及混肥灌中的液位、压力等信息)作巡检,根据测得的参数数据以 EC/PH值为中心,由PLC实现 PID调节,输出控制信号量,作用到执行机构,从而实现对被控参数的自动调节,形成闭环控制,提高精确度。对施肥液的 EC/PH值进行 PID调节的原因是:若施肥液的p H值不适当,使作物对营养要素的吸收受阻;而施肥液浓度越大,则EC值越大,渗透压越高,作物越难以吸收水分和养分,造成“盐害”[10]。因此,在不适合的 EC和p H值情况下有必要对其进行调节。
系统中上位机IPC实现通过用户界面输入控制指令、监控系统工作、查询系统信息等;下位机PLC实现对传感器信号的采集和处理,反馈给IPC,同时能够接收并输出上位机的控制指令,驱动执行机构动作。施肥现场的各种传感器信息通过模拟量输入模块采集至PLC,以串行通信方式上传至IPC机。IPC与PLC通过 RS-232串口连接,可实现双向数据传送及数据处理。
2 系统的设计
2.1 硬件组成
系统硬件组成如图2所示,其主要元器件包括IPC、主控制器 PLC、模拟量输入/输出模块、系统电源、电磁阀、高精度的EC/PH传感器、液位传感器、压力传感器、流量检测计、肥料泵等元件。PLC选择日本三菱 FX2N系列 FX2N-32MR,其 I/O各为16点,能够满足使用要求。PLC与 IPC之间通过FX2N-232-BD通讯板进行连接,以串行通信方式进行通讯。PLC输入的传感器信号及输出电压、电流驱动执行机构通过 FX2N-4AD及 FX2N-4DA来完成。电动执行机构可与FX2N-4DA配套使用,接受统一的直流标准信号4~20 mA,并将此信号转换成相应的角位移或直线位移,自动操作阀门,完成调节。

图2 系统硬件组成Fig.2 Composition of the system hardware
2.2 IPC监控程序设计
上位机IPC所要完成的功能主要包括:人机交互界面、数据通讯、输入输出处理三大部分。
1)人机界面要实现控制量的输入,控制过程状态变量的采集,显示和保存(实时曲线、历史曲线、数据库操作等)以及数据处理结果的输出、打印。
2)数据的传输通过 IPC与 PLC之间的RS232串口通讯协议完成。系统实时进行数据采集,允许操作者通过软件设定控制参数,改变控制状态。
3)输入输出处理是指IPC通过通讯端口把采集到的原始数据进行处理,以用户可以读懂的形式表现出来。采集到的数据先通过数据库保存,同时用图形或列表等比较直观的形式显示在用户面前。
用户监控程序在VB6.0环境下进行开发,其界面如图3所示。

图3 监控程序主界面Fig.3 Monitor program main interface
3 精准滴灌施肥监控系统的实现
3.1 施肥决策信息的获取
首先需要获得施肥地块的空间位置信息,得到所施地块的边界轮廓。将记录的地块边界 GPS数据转换成地理信息系统软件Map Info兼容的格式,利用Map Info及其二次开发语言Map Basic进行编程处理,可得到地块边界图[11]。
其次,对边界进行单元划分与编码,目的是按每一个小的操作单元采集田间状态信息,根据土壤肥力的差异性做出施肥决策。在Map Info环境下对边界进行单元划分和编码,将此地块划分为小的操作单元,并对划分的单元进行命名和编码[12-13],如图4所示。
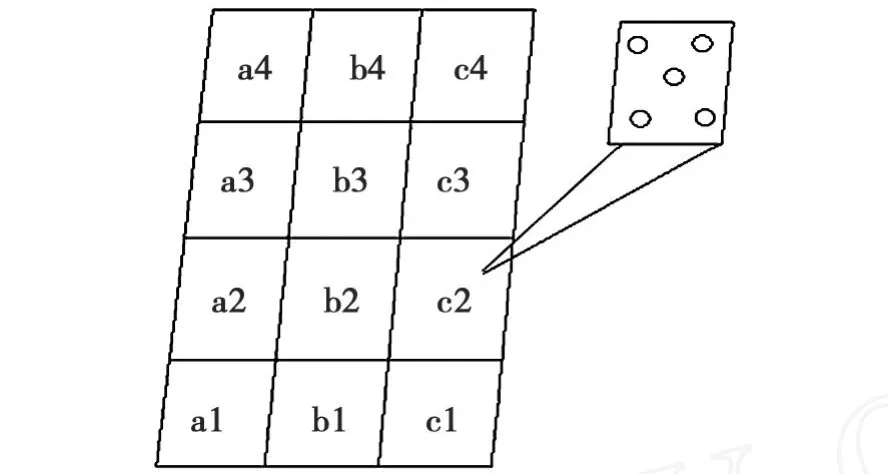
图4 施肥地块的单元划分、编码图Fig.4 Fertilizing plot code pattern
最后对编码的地块进行土壤养分数据的采集和处理,测试土壤的养分数据(碱解氮、速效磷、速效钾等),建立农田信息数据库,管理土壤养分信息。由专家决策系统综合考虑目标产量、土壤养分及作物生长情况,得出每个操作单元的施肥决策方案。
3.2 精准滴灌施肥监控系统的运行
采用PID策略的控制系统,其稳态精度高,提高了变量施肥的准确性;动态响应快、超调小,改善了变量施肥的快速性;抗干扰能力强,能够更好地适应田间作业环境[14]。由于在滴灌施肥过程中,要求施肥液的 EC/PH值等参数保持恒定,故由PLC采用PID控制方式实现闭环控制。PLC的 PID控制方式的实现是以连续系统的PID控制规律为基础,其输入输出关系为:上式中M(t)为控制器的输出值,M0为输出的初始值,e是给定值与被控制变量之差,即回路偏差。Ke为回路的增益,TL为积分时间常数,TD为微分时间常数。

三菱FX2N系列PLC有供PID控制用的功能指令,与模拟量输入/输出模块一起使用,可以方便地实现PID控制。PID控制程序的梯形图见图5。
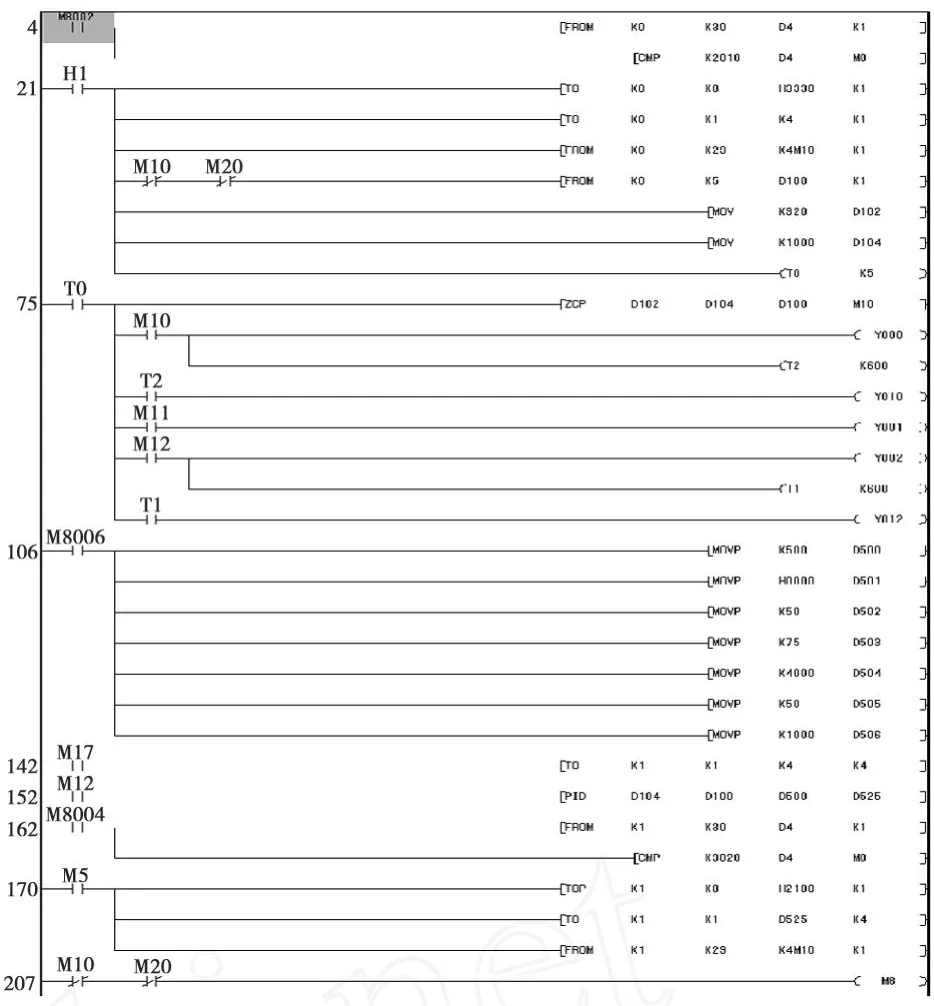
图5 PID控制梯形图Fig.5 PID control ladder diagram
PLC与 IPC之间通过RS232串口进行通讯,IPC主要负责向RS232串口发送主控信号,PLC用于接收从RS232串口发送过来的主控信号,再根据信号的内容驱动执行机构做出相应的动作(如图1中的开关阀及调节阀)。对于施肥过程中需要实时监控的数据,包括施肥液储罐的液位和压力、电磁阀的流量、肥水采样中的EC和PH值等,PLC采集传感器信息经转换后上传至IPC,通过监控程序实时显示。当需要调整施肥参数时,在上位机监控界面中进行修改,并下达指令,由PLC输出,驱动执行机构动作,执行精准化操作。
5 结语
在目前具备滴灌施肥作业的生产条件下,将全球定位技术、地理信息系统技术、人工智能技术、自动控制技术相结合,由上位机根据施肥决策设置操作程序,下达控制指令,同时对整个过程进行全面监控;由下位机控制相应执行机构动作,从而执行精准化作业。这是目前新疆兵团及自治区整个农业生产体系中施肥作业的发展需求和发展方向。本文以IPC+PLC为中心开发了精准滴灌施肥监控系统,该系统能够提高滴灌施肥作业的精准化程度,实现生产全过程的自动化,节约生产管理成本。
[1]王秀,赵春江,孟志军,等.精准变量施肥机的研制与试验[J].农业工程学报,2004,20(5):114-117.
[2]张书慧,齐江涛,廖宗建,等.基于CPLD的变量施肥控制系统开发与应用[J].农业工程学报,2010,26(8):200-204.
[3]李富先,吕新,王海江,等.棉花膜下滴灌比例混合变量施肥系统的研发[J].农业工程学报,2008,24(5):115-118.
[4]杨利勇,吕新,李保成,等.基于中间件的棉田土壤肥力施肥决策系统的研究[J].石河子大学学报:自然科学版,2007,25(5):658-660.
[5]邵利敏,王秀,牛晓颖,等.基于 PLC的变量施肥控制系统设计与试验[J].农业机械学报,2007,38(11):84-87.
[6]孙波,严浩,施建平,等.基于组件式 GIS的施肥专家决策支持系统开发和应用[J].农业工程学报,2006,22(4):75-79.
[7]王国伟,闫丽,陈桂芬.变量施肥对改善土壤养分空间差异性的综合评价[J].农业工程学报,2009,25(10):82-85.
[8]潘瑜春,薛绪掌,陈立平,等.基于 GIS的变量施肥尺度效应模拟系统[J].农业工程学报,2005,21(6):77-81.
[9]肖丽,侯振安,龚江,等.不同滴灌施肥方式对盐渍土棉花生长和氮素吸收的影响[J].石河子大学学报:自然科学版,2008,26(4):427-430.
[10]杨春园.智能施肥机控制系统的设计与实现[D].北京:中国农业大学,2007:3-4.
[11]张书慧,马成林,吴才聪,等.变量施肥机空间数据采集与处理方法[J].农业机械学报,2004,35(4):93-96.
[12]吴才聪,张书慧,马成林,等.利用 MapBasic划分精确农业田块网格方法的研究[J].农业工程学报,2002,18(2):156-159.
[13]吴才聪,马成林,张书慧,等.基于 GIS的精确农业合理采样与施肥间距研究[J].农业机械学报,2006,35(2):80-83.
[14]梁春英,衣淑娟,王熙,等.变量施肥控制系统 PID控制策略[J].农业机械学报,2010,41(7):157-162.
Implementation of Precise Drip Fertilization’s Monitor System
NIE Jing,WANG Hongkun,CEN Honglei,LI Hongwei
(Department of Electrical Engineering,College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832003,China)
In order to improve the automation level of drip fertilization process,master manufacturing process information real time,execute precise operations,a IPC and PLC-oriented monitor system for precise drip fertilization was designed and realized.The system setup fertilization parameter that matched nutrient demand of crop different growth stage by human-machine interface,IPC detect parameter of control object by PLC and real-time display,PLC obtain control signal by PID algorithm and impact actuator,automaticaly regulate controlled variable,system can realize precise monitor of drip fertilization process.
drip fertilization;automation;monitor;precision;PID algorithm
S224.21;TP29
A
2010-09-13
聂晶(1979-),男,讲师,从事微机机电控制研究;e-mail:niejing19@163.com。
猜你喜欢
排灌机械工程学报(2022年11期)2022-11-26
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
节水灌溉(2021年9期)2021-10-13
灌溉排水学报(2021年1期)2021-01-27
当代陕西(2020年21期)2020-12-14
NBA特刊(2018年11期)2018-08-13
民生周刊(2017年19期)2017-10-25
岷峨诗稿(2017年4期)2017-04-20
节水灌溉(2017年10期)2017-03-21
