铜绿山矿副井井筒延伸工程贯通测量
2011-11-17 09:20魏碧江
采矿技术 2011年5期
魏碧江,袁 明,郝 波
(1.大冶有色金属集团公司铜绿山矿, 湖北黄石市 435005;2.大冶有色设计研究院有限公司,湖北黄石市 435005)
铜绿山矿副井井筒延伸工程贯通测量
魏碧江1,袁 明2,郝 波2
(1.大冶有色金属集团公司铜绿山矿, 湖北黄石市 435005;2.大冶有色设计研究院有限公司,湖北黄石市 435005)
为满足铜绿山矿副井延深贯通需求,提高测量精度,采用陀螺定向技术,通过地面控制测量、井筒中心测量、竖井联系测量、井下控制测量等工作,求解出副井井筒中心坐标并在-605m水平精确测设该点,计算得最大贯通为0.034m,小于附井贯通的允许值0.1 m,确保副井延深正确贯通,为井筒掘进安全快速施工提供科学指导。
矿井延深;贯通测量;定向技术;陀螺定向;控制测量
0 前 言
根据铜绿山矿地下开采需求,该矿副井需由目前的-365m延伸至-605m。根据工程设计,目前在-365m中段距副井约80m处已建好措施井,计划由-605m中段措施井处向副井掘进,在-605m水平确定副井井中位置,由-365m向下及-605m向上相向掘进至贯通。测量应保证工程的正确贯通,要求贯通中心偏差不大于50mm。为此通过地面控制测量、井筒中心测量、竖井联系测量、井下控制测量等工作,求解出副井井筒中心坐标并在-605 m水平精确测设该点,满足副井延深贯通需求。
1 地面控制测量
地面控制测量采用GPS技术,依托有色金属矿山井巷工程测量规程YSJ415-93(简称《规程》)、工程测量规范GB50026-93(简称《规范》)和全球卫星定位系统(GPS)测量规范GB/T18314-2001(简称《GPS规范》),按E级GPS精度布测近井点及后视方向点;采用四等水准方法测定近井点及基准点高程;采用小直径弹簧钢丝向井下导入坐标、陀螺经纬仪定向及全站仪测距直接测量井筒深度等方法进行竖井联系测量;采用全站仪按井下一级导线精度布测井下控制;采用全站仪极坐标法精确测定副井地面及-365m的井筒中心坐标并测设-605 m副井井中坐标。
铜绿山矿区经多年露天开采,加之近年来由露天开采转入地下开采,原有的地面基础控制网点由于各种原因均已损毁,目前副井保存有近井点一点但缺失后视方向。考虑到该矿已转入地下开采及本工程需求,本次地面控制测量的目的是重新观测近井点并增加2个后视方向点。
1.1 E级GPS控制测量
近井点及后视方向点按E级GPS精度施测,其精度相对邻近起算点点位中误差不超过±25mm,方位角中误差不超过±10″。地面控制点起算点采用三等三角点,谢季岩、走马山2点均为铜绿山矿区原四等三角网的起算点,保存完好,近年来经多次检验,精度良好。拟由该2已知点及3个未知点组成2个独立环的E级GPS网。E级GPS测量主要技术要求见表1。

表1 E级GPS测量的主要技术要求
1.2 四等水准测量
采用四等水准测定井口水准基点及近井点高程。水准起算点采用一等水准点“武九-30”。四等水准主要技术要求如表2所示。

表2 四等水准主要技术要求
2 井筒中心坐标测定
精确测定井筒中心坐标是本次工程测量的关键环节之一,本次测量应在地面副井口及-365m水平2个面上测定井中坐标,比较两坐标差异并会同设计人员确定-605m水平的最佳井中坐标。
采用全站仪极坐标法测定井中坐标,测量时,拟在地面及-365m井筒圆周均匀独立测定2组井壁坐标,每组12点,如图1所示。各点尽量在同一水平面上,宜用免棱镜模式观测。观测成果由绘图软件模拟出井中坐标。2组测量成果模拟出的井中坐标较差不应大于15mm。
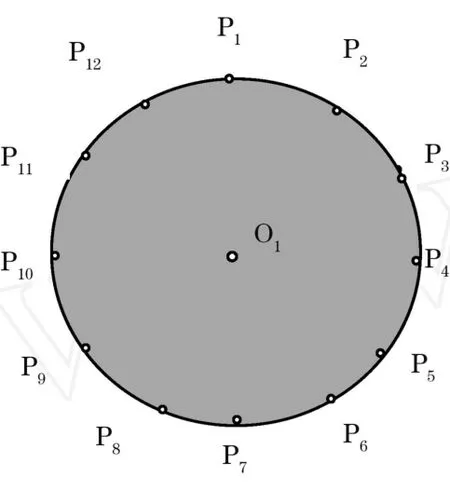
图1 井壁观测点布置示意
3 竖井联系测量
采用小直径弹簧钢丝向井下导入坐标、陀螺经纬仪井下定向及全站仪测距直接测量井筒深度等方法进行竖井联系测量。本项目需进行2处竖井联系测量(即副井地面~-365m、措施井-365~-605 m),每处联系测量均需独立进行2次。
3.1 投点
投点的主要设备为手摇绞车、导向滑轮和重锤砣、稳定桶及稳定液等,其中手摇绞车承受荷载能力应为投点时所受荷重的3倍,滚筒直径不应小于250mm并设有双闸制动装置;导向滑轮直径不应小于150mm;重锤砣应对称悬挂。
投点和连接测量期间,应停止风机转动,若井筒淋水过大应采取挡水措施。下放垂线时,测量负责人应亲自指挥将垂线放至联测水平,加挂工作重砣后,应对垂线与井壁、垂线与井筒中设备、重砣与桶壁进行仔细检视,确保无接触。当垂线摆幅小于10 mm时,采用全站仪直接观测垂线摆幅中间进行坐标联测。联测时采用两秒级全站仪井上、井下同时进行。
3.2 陀螺经纬仪定向
拟在-365m中段和-605m中段各布测1条陀螺方位边,要求两端点必须是永久导线点,并应满足无淋水、风小、便于观测,长度应大于50m,采用瑞士产GAK1陀螺经纬仪(25″级)按逆转点法进行观测。陀螺经纬仪定向应符合下列规定:
(1)在井下定向测量前后,应在地面同1条已知边上各测量3次陀螺方位,前、后求得6个仪器常数,其任意2常数互差不应超过±70″。
(2)陀螺经纬仪的悬挂带零位不应超过±0.5格,超过时应及时校正,达到要求时方可使用。
(3)井下同一定向边2次独立陀螺仪定向值,其互差应小于50″。
(4)井上、下观测应由同一人进行。
陀螺经纬仪的观测及各项限差要求,应符合《规程》4.5.4、4.5.5、4.5.6、4.5.7之规定。
3.3 高程导入
结合铜绿山工程实际可采用如下2种高程导入方案:
(1)方案1。采用全站仪测距直接测定井筒深度进行高程导入。作业时,在井口支撑架上安置全站仪(此时全站仪竖轴应垂直于铅垂线),在井下设置棱镜组,使其大致与全站仪在同一铅垂线上,通过全站仪的望远镜或激光导向装置照准棱镜测距,求出井筒深度,井上、下分别用三角高程法测定上、下水准基点至全站仪中心和棱镜中心高差。全站仪测量井筒深度时,应测量井上、下的温度和气压等气象数据,温度记录至0.2℃,气压记录至100Pa。
(2)方案2。采用钢丝法高程导入。井上、井下水准基点与钢丝上相应标志之间高差用水准仪2次独立测定,其互差不大于4mm。钢丝上、下两标志之间长度采用比长台方法测量,测量时应施加导入高程时所用重锤相当的拉力并顾及温度改正,2次独立导入的高程较差,不大于井筒深度的1/8000。
4 井下控制测量
(1)平面控制。井下平面控制拟按基本导线一级精度要求布测,主要技术要求如表3所示。井下一级导线水平角观测应符合《规程》5.3.1、5.3.3之规定。井下一级导线边长采用全站仪往返观测各一测回(读数4次,互差不大于3mm),往返边长较差不大于边长的1/8000。
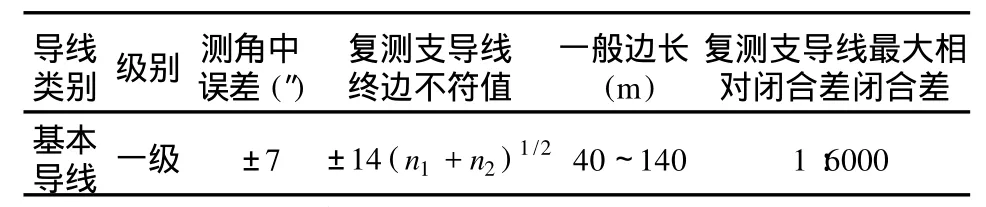
表3 井下导线主要技术要求
(2)高程控制。高程控制采用三角高程测量,在施测导线的同时进行。三角高程的垂直角观测1测回,仪器高和目标高测前测后量2次,较差不得大于4mm,取平均值作为最终成果。同一条边往返高差不符值及复测支导线末端点高程不符值分别不大于10+0.3S和30L0.5mm(S为以公里为单位的导线边平距,L为以公里为单位的导线全长)。
5 井中测设
-605m中段基本导线布测完成后,即可对该水平的副井井中进行测设,采用全站仪极坐标法测设,测设完成后的点位坐标的测量值与理论值较差不得大于10mm。
6 误差分析及精度估计
由本工程特点可知,地面控制点误差对本次贯通没有影响,贯通误差主要由以下几项误差组成:
(1)投点误差,包括地面井口投点至-365m中段及措施井的-365m中段投点至-605m2次投点误差;
(2)地下支导线测量误差,包括-365m中段副井至措施井及-605m中段措施井至副井2条支导线误差;
(3)-605m中段副井测设误差。
由于投点误差和测设误差相对较小并且较容易控制,下面主要讨论井下支导线对贯通的影响。
井下支导线末端误差主要由陀螺起始边误差测角误差、测边误差引起。假设任意形状支导线初始坐标x0,y0起始方位为a0,经过n站导线测量可计算出最终点k的坐标。
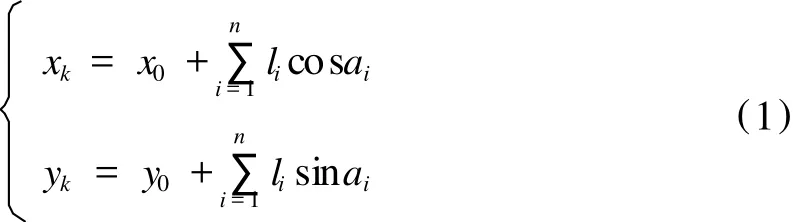
设mβi为第i站相应测角误差;mli为第i条边测边误差。支导线终点坐标为所有实测角度和边长的函数,根据误差传播理论推导可得:

设陀螺起始方位边误差为mt,导线终点与起始点连线长度为L,则起始方位引起的导线终点误差为:

根据地下导线的布置图,将各参数代入式(2)~式(4),得-365m导线终点误差分别为:M1β=0.0032m,M1l=0.0112m,M1t=0.0062m;-605 m导线终点误差分别为:M2β=0.0025m,M2l=0.0110m。设竖井投点误差及-605m副井井中测设误差均为0.010m,则-605m副井井中位置中误差为0.0245m,由于以上过程均取2次独立成果为最终成果,故-605m副井井中位置中误差为0.0245=0.017m,取2倍中误差为允许误差,则最大贯通为0.034m,小于附井贯通的允许值0.1m。
[1]YSJ415-93.有色金属矿山生产技术规程[S].
[2]安海波.现代矿山测绘新技术与实际应用及现场操作技术规范[M].西安:西北矿业学院出版社,2006.
[3]GB/T18314-2001.全球卫星定位系统(GPS)测量规范[S].
[4]刘宏伟,刘中元.竖井贯通测量方案优化[A].矿山测量编辑部.全国矿山测量新技术学术会议论文集[C].唐山:矿山测量编辑部,2009:81-83.
2011-08-15)
魏碧江(1968-),男,测量助理工程师,注册安全工程师,主要从事矿山测量及工程施工管理工作。
猜你喜欢
矿产勘查(2020年1期)2020-12-28
新疆有色金属(2020年3期)2020-09-14
水电站设计(2020年4期)2020-07-16
三门峡职业技术学院学报(2020年1期)2020-05-20
湖南安全与防灾(2020年12期)2020-02-04
工程与建设(2019年3期)2019-10-10
建材发展导向(2019年5期)2019-09-09
建材与装饰(2018年21期)2018-05-23
企业文化·中旬刊(2016年12期)2017-05-05
电测与仪表(2016年9期)2016-04-12