
基于归一磁链/电流法的开关磁阻电动机间接位置检测
2011-11-20 08:34樊宁佳陈海进
微特电机 2011年5期
樊宁佳,陈海进
(南通大学,江苏南通226019)
0 引 言
开关磁阻电动机(以下简称SRM)是20世纪80年代发展起来的一种机电一体化的新型驱动系统[1]。它以其结构简单、运行可靠、容错能力强等优良特性,成为现代驱动系统中的一支强有力的新军,应用前景广阔[2]。传统的轴位置传感器或者其他类型的探测式位置检测器不但会提高系统成本和复杂程度,更重要的是会降低SRM系统结构的坚固性,影响整个系统的可靠运行,尤其是在某些应用环境比较恶劣的场合。因此利用电机的电压和电流或者其他信息间接确定转子位置从而使系统结构更加坚固、运行更加可靠、高效、成本更加低廉,无疑是一个很具潜力的研究方向[3]。至今已有的方案[4]有导通相检测法、非导通相检测法、基于智能控制检测法以及附加元件检测法等。
本文提出了一种基于磁链/电流法的SRM间接位置检测方案,磁链/电流法又称查表法,由于转子位置角为绕组磁链和绕组电流的单值函数,若已知对应不同转子位置的磁链、电流曲线数据,就可建立一个关于电流、磁链、位置角关系的二维表存储在内存中,通过计算某个时刻的磁链,与采样得到的电流一起通过查表、插值等算法得到当前时刻的转子位置。但是根据原始电机磁化曲线直接建立的查找表,存储数据表格利用率低,针对这一问题,本文提出一种通过对磁链数据归一化的方法提高表格利用率、避免硬件实现时存储资源浪费,整个检测过程都只依赖于磁链、电流、位置角关系数据,避免了系统的其他参量,比如转矩、惯量、阻尼系数等对位置估算过程产生影响,并且此方法易于硬件实现。本文对基于电流/磁链法的SRM间接位置检测方案进行仿真,为基于归一磁链/电流法的开关磁阻电机间接位置检测方案的硬件实现提供了理论参考价值。
1 磁链/电流法的基本原理及算法改进
1.1 基本原理
磁链/电流法于1991年由J.Lyons等人首次提出[5],其最初的算法如下:开关磁阻电机电压方程:

由式(1)可得:

如果忽略绕组互感的影响,则一相绕组磁链ψ与该相绕组的电流i、转子位置θ的关系[2]:

式(4)表明转子位置角θ为绕组磁链ψ和绕组电流i的函数,并且可以证明其为单值函数,磁链/电流法就是预先将ψ、i以及每对(ψ,i)对应的转子位置角θ存储起来,电机运行时,根据电压、电流传感器测得0~t时刻电压u(t)、电流i(t),根据式(2)求得t时刻的磁链值ψ(t),由于SRM转子和定子均无永磁体,ψ(0)可取为零[6],然后根据得到的[ψ(t),i(t)]查找存储位置角的二维表格,得到t时刻的转子位置。
1.2 算法改进
根据已知的ψ-i-θ关系数据,形成横坐标为磁链ψ、纵坐标是电流i、输出矩阵是位置角的查找表,二维表格整体图如表1所示。直接利用已知的ψ-i-θ关系数据形成查找表,若实际数据中角度统一范围,对应的ψ范围是不统一的,这给建立输入是统一范围的电流i、统一范围磁链ψ,输出是一定范围位置角的查找表造成了困难,统一磁链范围的表格,输出转子位置角矩阵产生无关数据区域如表1中“X”区域,这些无关数据与表格大小的关系是没有规律可循的,造成查找表硬件实现时大比例的存储资源浪费,针对此问题,本文提出的方法是在建立查找表之前,对磁链进行归一化。

表1 输出为转子位置的二维表格整体图
磁链归一化的步骤如下:
(1)将原始磁化数据中每个转子位置角对应的磁链向量与电流向量分别进行插值,形成适当大小的新表格(表格大小应权衡精度要求和硬件存储资源)。
(2)将每行电流对应的磁链向量进行归一化,归一化的公式如下:

ψmn为表格中磁链矩阵第m行n列的磁链值,ψmnnormal为表格中磁链矩阵第m行n列磁链值的归一化值,ψmmin为第m行磁链中的最小值,ψmmax为第m行磁链中的最大值。归一化的结果是每行电流值对应的磁链值的范围都统一到0~1的范围。
(3)将电流列向量对应的每行ψmmin组成的ψmin列向量和每行ψmmax组成的ψmax列向量保留,做查表时使用。
(4)对磁链归一化后的表格中每个电流对应的归一化后的磁链向量与位置角向量进行插值,将得到的关于转子位置角的二维矩阵留做查表使用,磁链归一化后的归一磁链与转子位置角关系曲线图如图1所示。
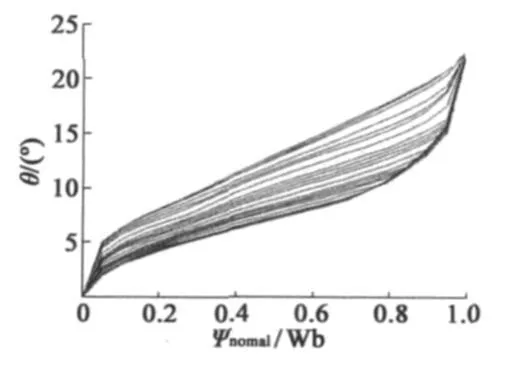
图1 磁链归一化后归一磁链与角度的关系图
2 基于磁链/电流法的间接位置检测方案仿真
2.1 方案实现
本文提到的基于归一磁链/电流法的电机间接位置检测方案的开关磁阻电机调速系统(以下简称SRD)[1]结构图如图2所示,图2虚线框内的部分是间接位置检测部分。

图2 开关磁阻电机调速系统(SRD)
SRM的三相电流、电压通过积分器得到三相磁链,首先根据t时刻的电流分别查找电流与磁链最大值、电流与磁链最小值的一维表格,得到t时刻的电流对应的磁链最大值和磁链最小值,然后将t时刻的磁链归一化,由归一磁链与t时刻的电流查找存储角度的二维表格,得到转子位置角,反馈给电机控制系统产生正确的控制信号,使得SRM调试系统闭环运行,实现间接位置检测。
由于原始数据的角度范围是0~22.5°,如果只根据其中一相的电流、磁链估算不了超出22.5°的角度,由于电机三相是轮流导通的,且三相之间有固定的角度差(15°),所以只要三相中的每一相依次导通满15°,就可以得到任意一相在0°~45°范围内的角度值,所以方案中用相位切换的方法,使得三相轮流切换,根据所选相的磁链、电流查表得到所选相的位置角以推导其他两相的角度。
在SRM的正常运行情况下,每一相的激励区域是相互覆盖的,因此在一个时刻可能不止同时激励一个相位。理论上,输入不同导通相位的电流和磁链值能推算得到相同的位置。但是每一相都有转子位置检测的最佳区域,在转子位置靠近对齐和非对齐角度或者转子相位电流低的边缘区,估算误差大。另外,通过定性和定量的误差分析,在这些区域,角度估算对输入信号的误差更敏感[7]。因此,在转子位置检测过程中应尽量避免使用这些区域作为估算区域,在三相切换的过程中,当磁链、电流都很小时,位置角度数据估算误差会比较大,所以方案中还需包含当切换到某相位时保证所在相的磁链大于0 Wb的功能。
三相磁链和相切换控制值Switch的关系如图3所示,在相位切换控制值Switch变化时,所选相的磁链都是大于0Wb的。

图3 三相磁链和相切换控制值Switch的关系
2.2 仿真结果
针对12/8开关磁阻电机模型,建立的间接位置检测的开关磁阻电机调速系统仿真结果如图4所示。

根据图4可知,本文所述的基于归一磁链的SRM间接位置检测方法可以实时估算电机的转子位置,在电机起动后误差保持在0.5°左右,当电机转速变快时,也能比较准确地估算转子的位置并将误差控制在1°以内,说明该方案的可行性和可靠性。
3 结 语
SRM位置调速系统是位置闭环系统。位置传感器的存在不仅削弱了SRM结构简单的优势,而且降低了系统的可靠性。因此间接位置检测技术的研究是SRM研究方向重点之一。本文提出的基于归一磁链的间接位置检测方法解决了传统磁链/电流法依据原始磁化数据形成查找表表格利用率低的问题,实现方案易懂,能够实时估算电机转子位置,当电机转速变快时也能比较准确地估算转子位置,符合设计要求,仿真结果表明了该方案对转子位置估算具有较高的精度和可靠性,为基于归一磁链/电流的开关磁阻电机间接位置检测方案的硬件实现提供了理论参考价值。
[1] 詹琼华.开关磁阻电动机[M].武汉:华中理工大学出版社,1992.
[2] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[3] Ehsani M,Fahimi B.Elimination of position Sensors in Switched Reluctance Motor Drives:State of the Art and Future Trends[J].IEEE Transactions on Industrial Electronics,2002,49(1):40-47.
[4] 张大鹏.开关磁阻电机无位置传感器控制技术的研究[D].天津:天津工业大学,2007.
[5] Lyons JP,MacM inn SR,Preston M A.Flux/Current Methods For SRM Rotor Position Estimation[C]//IEEE Transactions on Industry Applications Society AnnualMeeting.1991,1:482-487.
[6] 曾文禹,刘闯,周强.开关磁阻电动机转子间接位置检测技术的研究[J].微特电机,2010(4):62-65.
[7] Panda D,Ramanarayanan V.Sensorless control of Switched ReluctanceMotor D rive with self-measured Flux-linkage characteristics[C]//IEEE Transactions on Power Electronics Specialists Conference.2000:1569-1574.
[8] 李宁.基于MDK的STM 32处理器开发应用[M].北京:航空航天大学出版社,2008.
猜你喜欢
大电机技术(2022年5期)2022-11-17
电机与控制应用(2022年4期)2022-06-27
防爆电机(2021年4期)2021-07-28
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
电子制作(2018年19期)2018-11-14
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年10期)2016-04-12