
基于形态学的红外小目标检测算法
2011-11-20 07:10郭张婷辛云宏
渭南师范学院学报 2011年6期
郭张婷,辛云宏
(陕西师范大学物理学与信息技术学院,西安710062)
基于形态学的红外小目标检测算法
郭张婷,辛云宏
(陕西师范大学物理学与信息技术学院,西安710062)
在分析复杂天空背景下红外视频序列特征的基础上,针对红外小目标本身特性及红外序列低信噪比的问题,提出适合该环境的红外小目标检测算法.该滤波方法以形态学滤波理论为基础,首先采用均值滤波和Opening-Tophat运算对红外视频序列进行预处理,然后运用基于均值和方差的统计分割方法提取图像中的运动目标,从而实现了红外小目标的检测.实验结果表明,所提出滤波方法具有良好的检测和分割效果,能够有效地改善跟踪精度.
红外小目标;形态学;Opening-Tophat;阈值分割
0 引言
随着信息化时代的到来和航空航天技术的迅猛发展,大量智能化、数字化设备在现代化军事装备中的应用,对红外跟踪系统的研究已经成为必然趋势.在我国,红外搜索探测跟踪系统分析(IRST)已经成为热门研究方向[1],而与此同时,此类基于红外视频序列的目标检测和跟踪算法的研究也显得尤为重要.
近年来,各种红外小目标序列的检测和预处理算法也层出不穷,如去局部均值、中值高通滤波算法、多级滤波算法、梯度倒数加权滤波算法、基于侧抑制的局部对比度增强算法等等[2-4],这些算法的提出在不同程度上实现了红外小目标的检测和增强,但由于红外小目标的特殊性和视频序列采集时环境因素的影响,单纯的使用某种算法仍然无法达到预期的增强目标和滤除噪声的效果,因此针对红外目标特性的预处理算法的提出能有效地改善预处理效果,从而更容易达到实时跟踪和精确跟踪的最终目的.
1 红外目标特性
常温下,物体辐射出的红外线位于中、远红外线的光谱区,易引起物体分子的共振并呈现明显的热效应,红外热成像技术也以此为基础.利用探测仪器测定目标本身和背景之间不同温度点发射的红外线波长和强弱的不同而形成可见图像的方法即红外热成像技术[5].红外成像中的目标有大目标和小目标之分,针对大小目标也有相应的检测和跟踪算法.
红外小目标的目标所占像素数目较少,一般情况下我们认为红外图像中6×6像素以下的目标为红外小目标,它们基本上没有可靠的形状信息,通常呈点状.除此之外,小目标没有明显的尺寸和纹理等信息,图像中目标的边界模糊不清,图像背景复杂,缺少目标和背景的先验知识.而在已捕获的红外视频序列中,红外大目标尺寸在6×6像素以上[6],当目标从我们的视野中掠过的时候,可以看到它的大致轮廓.
2 红外目标组合预处理算法
2.1 红外小目标检测过程

通常情况下,红外目标的跟踪系统有两种工作模式[7],即 DBT(Detect-Before-Tarck)模式和TBD(Track-Before-Detect)模式.文中使用先检测后跟踪的处理模式,过程如图1所示,也就是在跟踪前针对每帧图像的特点采用一系列的预处理方法对图像进行增强和分割,去除或减少图像中的噪声和杂波,最后再选取合适的跟踪算法对目标轨迹进行预测和跟踪.这种模式计算复杂度较低,便于实时处理.
2.2 预处理算法
实际应用中,红外探测器(热像仪等)与目标距离较远,加之光学系统、电路噪声以及其它干扰的影响,使得红外图像表现出信噪比较低的共性.对于包含小目标的红外单帧图像,通常可表示为:

上式中,a(x,y)表示红外热像仪等外围设备接收到的红外序列中的某帧图像,t(x,y)表示目标,b(x,y)表示背景,n(x,y)表示图像中的各种噪声和干扰[8].
本文主要研究天空背景下的红外小目标的检测问题.基于对红外图像的分析我们知道,红外图像的背景多表现为缓慢变化的部分,呈大面积连续状态[9],同时像素之间呈现出较大的相关性;大片的云层受到太阳光的散射和自身的辐射显得较亮,其灰度非常接近于小目标(飞机等),是最强的干扰.目标与背景的区别在于它与周围的像素点并无明确的相关性,在其出现的地方,往往会出现灰度上的突变.基于以上分析提出的预处理算法的流程如图2所示:

首先对输入图像进行均值滤波.所谓均值滤波即在一幅图像内部,以像素为单位,求出周围相邻像素的均值并赋值给中心像素,从而达到滤波的效果.这种方法中均值模板是一个低通滤波器,运算过程则是对整幅图像从上到下,从左到右的一个卷积过程[10].因为图像细节主要存在于高频区域,均值滤波在去噪的同时会导致图像的模糊.如果模板过大则会加剧模糊;模板越小则去噪能力越弱.图3所示为本文中选取的3×3均值模板,图4为其频谱特性.

在均值滤波的基础上对每帧图像进行Opening-Tophat[11-12]运算.这种Tophat开运算是形态学中的膨胀﹑腐蚀等基本算子的组合.它是一种很好的高通滤波算子,与膨胀和腐蚀算法类似,这种算子滤波效果的优劣与结构单元的选取有很大的关系,选取合适的结构单元可以更容易从复杂的背景中提取目标信息.腐蚀和膨胀都是形态学的基本运算,对于给定的目标x和结构元素s,腐蚀和膨胀运算分别有如下定义:

在此基础上,开运算定义为以相同的结构元素先做腐蚀再做膨胀[13],目的是去掉图像中一些凸角,平滑边界.其形式如下:

本文中所使用的Opening-Tophat算子正是依据腐蚀和膨胀,以及开运算定义而来的.

原始图像通过Opening-Tophat运算,得到了抑制背景后的信号和部分噪声.此时,结构元素的选择对滤波的结果有很重要的影响.选择合适的结构元素可以得到很好的抑制背景和增强目标的目的.
在图像分割方面,常用的方法包括基于边缘的分割和基于区域的分割[14-16].对于红外小目标而言,由于其所占像素有限,边缘信息并不明确,因此我们采用基于区域的分割算法对预处理后的灰度图像进行分割,通常包括基于平均灰度的分割和统计特性分割.本文中采用的基于均值和方差的统计特性分割也是其中一种.
假设a(x,y)为预处理后的灰度图像,其大小为dep×wide像素:

上式中aver为整个图像的均值,σ2为其方差,T为分割阈值,k为分割系数,它的选取直接决定分割效果.
在跟踪部分我们使用基于最小均方误差的kalman算法对目标位置进行跟踪和预测,由于此算法的优点在于目标此时刻状态仅取决于上一时刻的状态,对目标位置数据的存储和计算量都大大降低.表1中对比了几种常用的跟踪方法的利弊,实际应用中可根据获取的数据的类型和特点选取合适的跟踪算法.

表1 几种常用跟踪算法对比
通过以上对比[17-19]我们发现,不同的跟踪算法对不同的目标和背景干扰的处理效果不尽相同,因此在实际应用时,选取适合的预处理算法和跟踪算法显得尤为重要.使用本文中提出的基于形态学的红外小目标视频序列预处理算法对目标序列进行预处理,可以取得较满意的分割效果,从而为后续的目标跟踪和进一步处理、分析提供了良好的基础,也起到了一定简化运算和提高精度的作用.
3 实验仿真
本文仿真部分所使用的红外视频序列均使用武汉高德的ThermoproTMTP8系列红外热像仪采集获得.TP8采用最新技术的非制冷微量热型探测器,可分辨细微至0.08℃ 的温度变化,它采用OLED高分辨目镜的显示设备,红外视频序列的分辨率为288×288像素.以下均为算法的仿真结果.
首先,我们要对采集来的包含单个或多个小目标的红外视频序列的每帧图像进行3×3的均值滤波,滤去高频噪声.在我们选择的模板下,滤波所造成的图像整体的模糊是非常微弱的.
Opening-Tophat运算中结构元素的选取.我们选择了square和diamond两种结构单元,并对它们的滤波效果进行了对比.对比结果如图5所示:图a为未处理前的原始图像,图b和c分别为选取square和diamond两种结构单元时的滤波结果.

通过对比我们发现,使用square结构单元能更好的保持目标的相对轮廓并且基本滤除了周围以云层为主的噪声干扰,同种情况下,diamond结构单元的滤波结果中仍然能看到部分云层干扰.
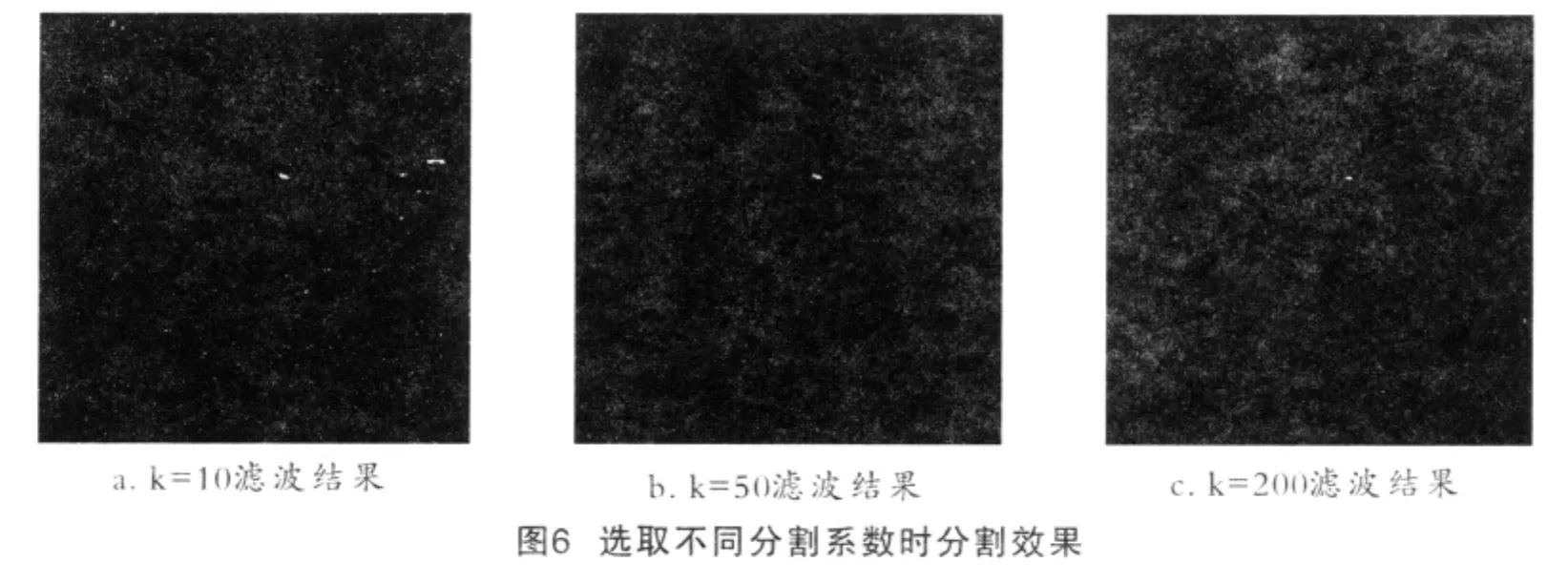
图像分割中分割系数的选择:T=aver+kσ中的分割系数k的选取直接决定分割效果,图6为选取k=10,k=50,k=200时的分割效果.结果表明当k取200左右时,效果最佳,基本滤除了干扰和噪声,同时增强了目标亮度.
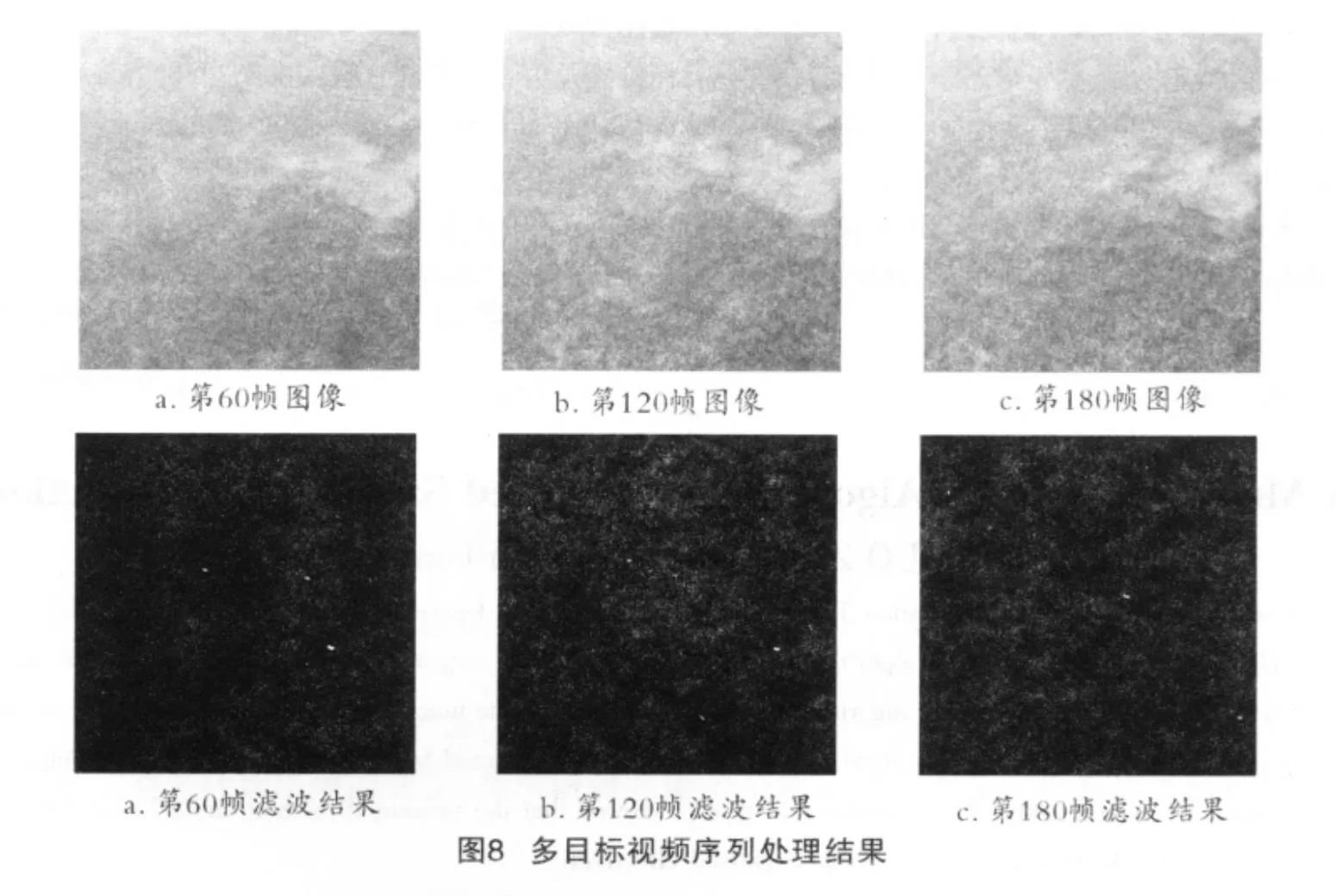
我们对视频序列中每帧图像使用本文中提出的算法进行预处理,得到一系列预处理前后的对比图像:图7所示为单目标红外视频序列的部分原始图像和滤波结果,我们分别选取了视频序列的第50帧(图a),第100帧(图b),第180帧(图c)图像.图8所示为多目标红外视频序列的部分原始图像和滤波结果,我们分别选取了视频序列的第60帧(图a),第120帧(图b),第180帧(图c)图像.
图7中单目标序列的处理结果我们可以看出,在视频序列的第50帧位置,飞机未经过云层;在第100帧的时候,飞机准备进入云层;在第180帧的时候,飞机完全进入云层时,组合预处理算法均得到了只有目标存在的二值图像.在多目标序列中,三个目标分别拥有不同的航迹和外形特征,同样也获得了只包含目标的二值图像.以上三组数据的处理,我们发现这种顺序的预处理算法在以上几种情况下均取得了较好的结果,除了滤除干扰以外还实现了对弱小红外目标的增强.

4 结束语
本文提出的针对复杂天空背景下红外小目标的预处理算法,用级联的方式融合了多个形态学基本算子,在单个和多个弱小目标存在的情况下均获得了较理想的滤波效果.通过以上对包含弱小目标的红外视频序列的分析,结合预处理算法的理论介绍和实验仿真结果,我们发现在像素值非常有限的红外小目标的检测过程中,切实有效的预处理算法可以帮助我们得到只包含目标的二值图像,帮助我们更容易锁定跟踪目标,开展后续的跟踪处理.同时,这种预处理算法也存在一些不足,比如当目标的灰度底于周围环境像素(暗目标)时,算法无法取得理想的滤波效果,这也是本项目下一步研究的重点.
[1]周晓玮.复杂背景下红外小目标实时检测与跟踪[D].武汉:华中科技大学,2007.3-5.
[2]阎敬文.数字图像处理[M].北京:国防工业出版社,2006.63-70.
[3]王苑楠.图像边缘检测方法的比较和研究[J].计算机与数字工程,2009,37(1):121-127.
[4]李铫.红外多目标跟踪技术研究[D].西安:中国科学院西安光学精密机械研究所,2008.
[5]Jeremy D.Bailoo,Martin O.Bohlen,Douglas Wahlsten.The precision of video and photocell tracking systems and the elimination of tracking errors with infrared backlighting[J].Journal of Neuroscience Methods,2010,6(3):253-264.
[6]J.Shaik,K.M.Iftekharuddin.Detection and tracking of targets in infrared images using Bayesian techniques[J].Optics&Laser Technology,2009,10(6):112-119.
[7]Jain R,Nagel H.On the analysis of accumulative difference of picture from image sequences of real world scenes[J].IEEE Trans PAMI,1979,9(7):206-214.
[8]Charlene EC,Jerry S.Optimization of point target tracking filters[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(1):5-25.
[9]杨烜,裴继红,谢维信.基于运动特征的远距离红外目标检测方法[J].电子与信息学报,2007,29(8):1829-1832.
[10]贺兴华,周媛媛.matlab 7.x图像处理[M].北京:人民邮电出版社,2006.
[11]颜佳,吴敏渊,陈淑珍.基于Mean Shift算法的伪装目标跟踪[J].光电工程,2009,36(2):11-15.
[12]罗寰.复杂背景下红外弱小多目标跟踪系统[J].光学学报,2009,26(6):21-23.
[13]管志强,陈钱,钱惟贤.一种背景自适应调整的弱点目标探测算法[J].光学学报,2007,27(12):2163-2168.
[14]WANG Xin,TANG Zhen-min.Modified particle filter-based infrared pedestrian tracking[J].Infrared Physics&Technology,2010,10(3):122-124.
[15]何东健.数字图像处理[M].西安:西安电子科技大学出版社,2003.
[16]温佩芝,史泽林,于海斌.基于形态学的海面背景红外目标检测方法[J].光电工程,2003,30(6):55-58.
[17]ZUO Zhen.Algorithm based on wavelet transform for small target detection on sea surface in infrared image[J].Infrared and laser Engineering,1998,14(5):155
[18]荆文芳.飞机红外图像的检测识别与跟踪技术的研究[D].西安:西北工业大学,2006.
[19]程建,杨杰.一种基于均值移位的红外目标跟踪新方法[J].红外与毫米波学报,2005,24(3):231-235.
A Morphology-based Algorithm for Infrared Small Target Detection
GUO Zhang-ting,XIN Yun-hong
(School of Physics and Information Technology,Shaanxi Normal University,Xi’an 710062,China)
The paper presented a novel algorithm to detect small infrared target in the complex background with low SNR.Based on the principle of morphology,the new algorithms preprocessed each frame image of infrared video sequences with mean filtering and opening-tophat filtering,and then the moving small IR target was extracted by means of statistical segmentation algorithms based on the average and square errors.The experimental results showed that the presented method had a better detection and segmentation performance,and the tracking accuracy was improved effectively.
small IR target;morphology;Opening-Tophat;threshold segmentation
TP751
A
1009—5128(2011)06—0035—06
2011—01—07
陕西省自然科学基金资助项目(2006F47);陕西师范大学优秀科技预研基金资助项目(20092006)
郭张婷(1986—),女,陕西宝鸡人,陕西师范大学物理学与信息技术学院信号与信息处理专业硕士研究生.研究方向:目标跟踪﹑图像处理;辛云宏(1967—),男,陕西蒲城人,陕西师范大学物理学与信息技术学院副教授,博士.研究方向:多传感器信息融合、WSN的组网与节点定位技术、被动目标的检测与跟踪等.
【责任编辑 牛怀岗】
猜你喜欢
温州大学学报(自然科学版)(2022年2期)2022-05-30
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
制导与引信(2017年3期)2017-11-02
光学精密工程(2016年3期)2016-11-07
工业设计(2016年11期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
