基于匹配场原理的矢量阵三维声源定位研究
2012-02-23 06:42王学志涂英吴克桐吴金荣蔡惠智
兵工学报 2012年8期
王学志,涂英,吴克桐,吴金荣,蔡惠智
(1.中国科学院 声学研究所,北京100080;2.中国科学院 研究生院,北京100080)
0 引言
对匹配场定位方法的研究是近年来水声学研究的热点。匹配场定位的基本原理是通过比较信号在接收阵上的协方差函数与假定声源位置后按传播模型数值计算得到的协方差函数之间的相关程度来确定声源的距离和深度位置。把检测因子用距离深度图进行描述,最大的检测因子对应的距离和深度就认为是声源的位置,该距离深度图就是著名的模糊函数。目前匹配场[1]的研究热点有快速稳定鲁棒的自适应匹配处理器[2-3],拖曳阵[4]和水平阵的使用,宽带信号;运动目标定位及跟踪[5];多目标定位及跟踪,各种失配的影响[6]。所谓矢量水听器就是用来测量水下声场矢量的声接收传感器,由声压水听器与直接或间接测量质点振速的传感器以不同方式组合而成[7-8]。由于矢量水听器的性能优势,其在水声工程中的应用日益广泛,矢量阵逐渐进入人们的视野。文献[9 -12]侧重于研究声场矢量物理特性,文献[13]利用矢量水听器进行浅海地声参数的反演。将矢量水听器或矢量阵与匹配场定位结合起来,实现矢量阵对声源的三维定位有广泛的理论意义和实际应用前景。
本文将二者结合起来,探讨如何将匹配场原理应用到矢量阵上实现声源的三维定位:距离、深度、角度。这里采用经典Bartlett 处理器,环境模型为Pekeris 模型,测量场和拷贝场都采用kraken[14]简正波模型计算,并且搜索采用距离、深度、角度三维穷举搜索。
1 公式推导
首先,根据简正波理论[10],声场中简谐声源激发的声压p,水平振速vr和垂直振速vz表达式如下:
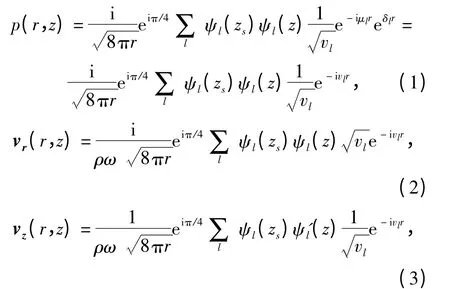
式中:ρ 表示海水密度;ω 表示角频率;l 表示简正波号数;r 表示距离;z 表示深度;vl=μl+iδl表示简正波的复本征值,本征值实部μl表示水平波数,本征值虚部δl表示简正波衰减;ψl(z)表示本征函数,是本征函数在垂直方向的导数。本文采用柱坐标系(r,θ,z),如图1所示。根据vx=vr×cosθ,vy=vr×sinθ 可以得到余弦方向水平振速vx和正弦方向水平振速vy,其中θ 为水平方位角。
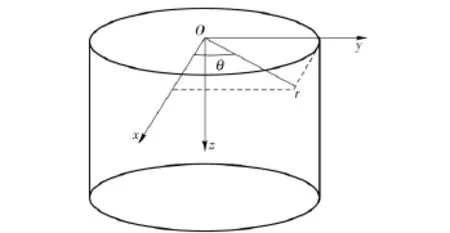
图1 柱坐标系示意图Fig.1 Cylindrical coordinate diagram
本文采用Bartlett 处理器,即在频域上将阵元输出进行加权求和。(4)式为利用声压进行Bartlett匹配表达式,记作p 方法;(5)式为利用声压和振速进行Bartlett 匹配表达式,记作pv 方法;(6)式为利用声压、余弦方向水平振速,正弦方向水平振速进行Bartlett 匹配表达式,记作pxy 组合;(7)式为利用余弦方向水平振速,正弦方向水平振速、垂直振速进行Bartlett 匹配表达式,记作xyz 组合。

式中:下标MF 表示匹配场处理器;H 表示共轭转置;Re 为取实部;P 为声压列向量;V 为振速列向量,可以表示vr、vx、vy或者vz.
引入归一化,(4~5)式即变为(8~9)式
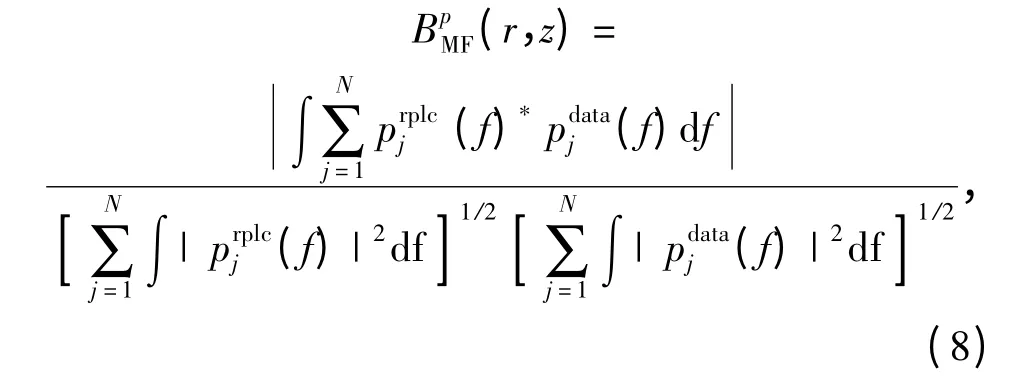

式中:j 表示接收阵元;N 表示接收阵元数目;f 表示频率;rplc 意为拷贝场;data 意为测量场。
由于分子项进行相关,分母项归一化。为了进一步研究分子项,这里给出其在水平阵下的表达式,推导如下:

(10)式、(11)式为声压和振速分别进行相关的表达式,其中下标s 表示表示接收点的声压、振速是来自真实声源。将(1)式、(2)式分别代入(10)式、(11)式,得到
同理可得

式中:j 表示简正波号数;lj表示虚拟声源到接收点处的简正波号数;mj表示真实声源到接收点处的简正波号数;h 表示二者共有的简正波号数。所以在求和号的上面有该式表示lj∩mj.这里需要说明的是,对于水平阵之所以仅仅保留对角项是因为:当阵元数足够多和阵列孔径足够大时,由于非对角项实部和虚部均含有正负值,并可使最终求和的实部和虚部各自消去,从而可使非对角项趋向于0[15]。而对于垂直阵可以利用模式正交进行类似简化[16],进而(8~9)式中分子项变为:

式中:num 表示分子项;θ'为搜索角度;θs为真实声源角度;θ 取法均为某阵元同声源连线与x 轴的水平夹角(见图1所示)。需要说明的是,在远场条件下,θj≈θ0,θj只会影响vx、vy,进而影响角度估计而对深度距离定位影响有限,为简化分析问题,进行上述简化。
又因为vl=μl+iδl,本征函数通常只包含实部,本征值的虚部远小于其实部(约3~4 个量级)[15],所以δl≈0,v*h≈vh,vh≈μh.所以(14~15)式变为:
在Bnump求和项中,exp[i(v*shrs0-vhr0)]为距离和本征值的e 指数函数。只有当深度距离匹配的时候,而在其他情况下为复数,由于模式累加和频率累积可以发生抵消进而抑制旁瓣。ψh(z's)ψ2h(z)ψh(zs)是随距离不变,随频率深度缓慢变化的,并且ψh(z's)、ψh(zs)有正有负,在求和中也会相消。
2 水平阵仿真
环境模型为Pekeris,海深为2 000 m,频率范围为10~35 Hz,步长为1 Hz,声源深度为500 m,接收阵深度为800 m,横坐标为0~980 m,步长为20 m,声源距第一个阵元距离为20 km,波达角度为90°.距离搜索范围为18~22 km,搜索次数为100;深度搜索范围为300~700 m,搜索次数为100;角度搜索范围为0~359°,搜索次数为360.水平阵仿真声学参数同表1.

表1 仿真声学参数Tab.1 Simulation acoustic parameter
图2、图4、图6分别是p 方法时分别固定角度、距离、深度时的模糊度图;图3、图5、图7分别是pxy方法时分别固定角度、距离、深度时的模糊度图。需要补充说明的是,图2~图7分别是在角度匹配、距离匹配、深度匹配下得到的。

图2 p 方法下角度匹配的模糊面Fig.2 Matching angle’s ambiguity plane under p method
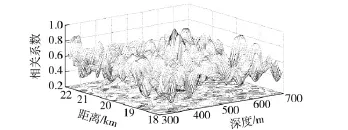
图3 pxy 方法下角度匹配的模糊面Fig.3 Matching angle’s ambiguity plane under pxy method
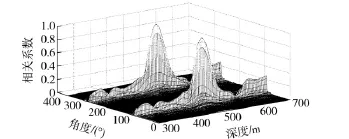
图4 p 方法下距离匹配的模糊面Fig.4 Matching range’s ambiguity plane under p method
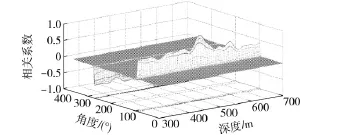
图5 pxy 方法下距离匹配的模糊面Fig.5 Matching range’s ambiguity plane under pxy method
对于水平阵,从图4、图6可以看到,p 方法在角度上是有一定指向性,但无法区分左右舷;从图5、图7可以看到,pxy 方法在角度是有指向性的,可以区分左右舷。表2是这样获得的:在匹配角度的情况下,分别进行距离、深度投影并获得主旁瓣比,同理获得匹配距离和匹配深度的结果。从表2可看出,在水平阵下,pxy 方法同p 方法相比,在距离和深度分辨能力有所下降,但在角度上有所提高。
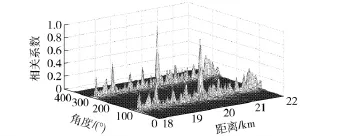
图6 p 方法下深度匹配的模糊面Fig.6 Matching depth’s ambiguity plane under p method

图7 pxy 方法下深度匹配的模糊面Fig.7 Matching depth’s ambiguity plane under pxy method

表2 水平阵仿真结果Tab.2 Vector horizontal array simulation result
3 垂直阵仿真
从水平阵仿真结果看到,pxy 方法同声压方法相比在距离和深度上有所下降,为了确定下降原因是出在水平阵还是在pxy 方法上。下面进行垂直阵的仿真。环境模型为Pekeris,海深为2 000 m,频率范围为10~35 Hz,步长为1 Hz;声源深度为500 m,接收阵元个数为50 个,深度范围为100~1 080 m,步长为20 m,横坐标为0;声源距第一个阵元距离为20 km,波达角度为90°.距离搜索范围为18~22 km,搜索次数为100;深度搜索范围为300~700 m,搜索次数为100;角度搜索范围为0°~359°,搜索次数为360.垂直阵仿真声学参数见表1.
图8、图10、图12 分别是p 方法时分别固定角度、距离、深度时的模糊度图;图9、图11、图13 分别是pxy 方法时分别固定角度、距离、深度时的模糊度图。需要补充说明的是,图8~图13 分别是在角度匹配、距离匹配、深度匹配下得到的。

图8 p 方法下角度匹配的模糊度图Fig.8 Matching angle’s ambiguity plane under p method
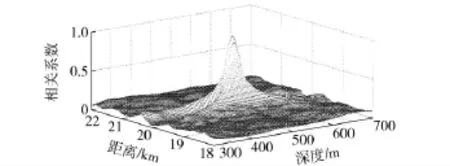
图9 pxy 方法下角度匹配的模糊度图Fig.9 Matching angle’s ambiguity plane under pxy method
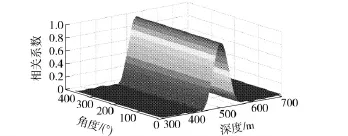
图10 p 方法下距离匹配的模糊度图Fig.10 Matching range’s ambiguity plane under p method
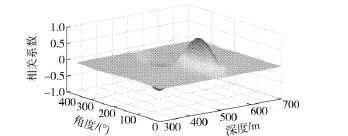
图11 pxy 方法下距离匹配的模糊度图Fig.11 Matching range’s ambiguity plane under pxy method
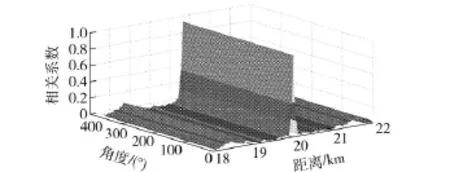
图12 p 方法下深度匹配的模糊度图Fig.12 Matching depth’s ambiguity plane under p method
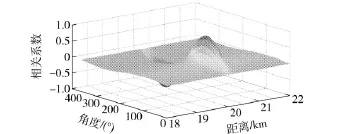
图13 pxy 方法下深度匹配的模糊度图Fig.13 Matching depth’s ambiguity plane under pxy method
对于垂直阵,从图10、图12 可以看到,p 方法在角度上是无指向性,因为垂直阵在水平上相当于只有一个阵元,而且声压是全方向性的;从图11、图13可以看到,pxy 方法在角度是有指向性的,并且区分左右舷。表3获得方式同表2.从表3可以看到,p方法和pxy 方法在距离和深度分辨能力是相当的。从图11、图13 可以看出,pxy 方法的主瓣宽度很宽,是因为垂直阵在水平上相当于只有一个阵元。
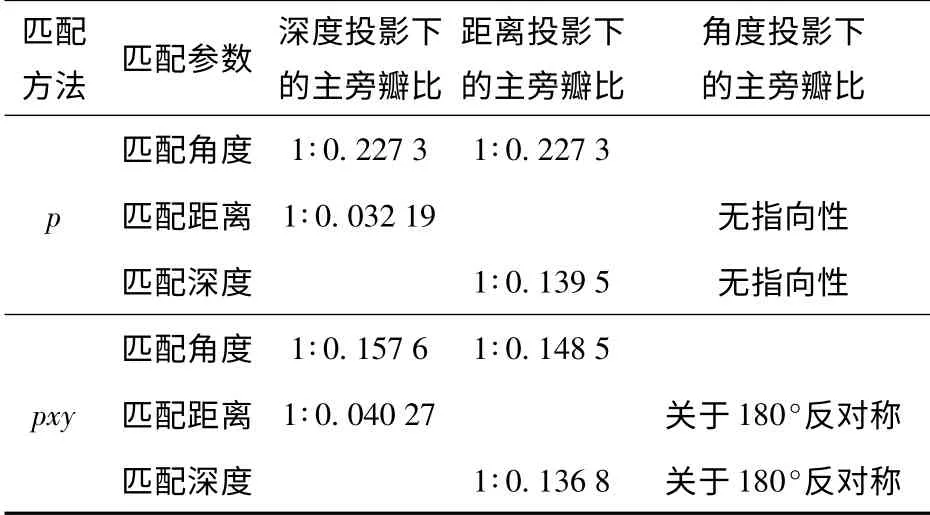
表3 垂直阵仿真结果Tab.3 vector vertical array simulation result
4 结果讨论与分析
4.1 分析上面结果
从上面的仿真结果,可以看到:在水平阵中,pxy方法同p 方法相比,在距离和深度分辨能力有所下降;而在垂直阵中,p 方法和pxy 方法在距离和深度分辨能力是相当的。
首先分析垂直阵的情况。将垂直阵中p 方法表达式中分子项、分母项及最后结果(均相对(6)式~(7)式而言)取对数进行比较,进而获得最大值和最小值即动态范围,获得下面的表5。由于p 匹配量纲不同于pxy 匹配,所以需要p2.进而获得表4.
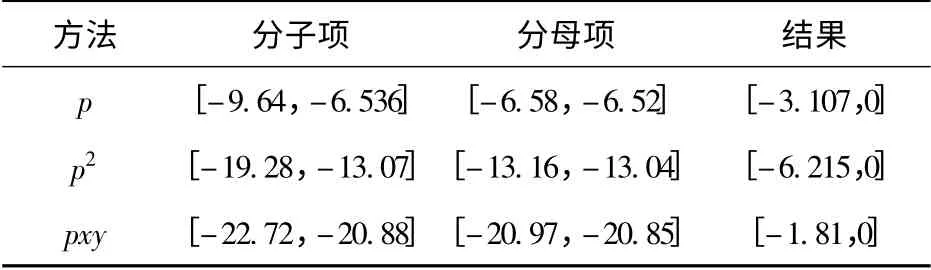
表4 垂直阵真实角度下动态范围Tab.4 Vector vertical array matching angle’s dynamic range
从表4可以看出,在垂直阵中,pxy 动态范围没有p2动态范围大。进一步分析得到:p2大部分幅值在-3°附近上下变化,而pxy 大部分幅值在-1°附近上下变化,即整体有所抬升。
下面分析水平阵的情况,处理方法同上面的垂直阵,进而获得表5.
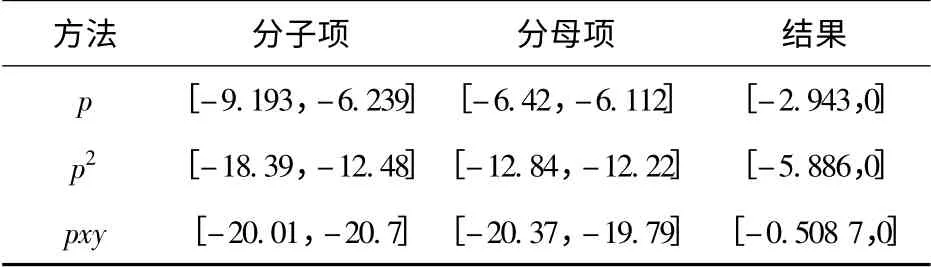
表5 水平阵真实角度匹配下动态范围Tab.5 Vector horizontal array matching angle’s dynamic range
从表5可以看出,在水平阵中,pxy 动态范围没有p2动态范围大。进一步分析得到:p2大部分幅值在-2°附近上下变化,而pxy 大部分幅值在-0.25°附近上下变化,同垂直阵相比,整体抬升绝对幅值不同。
通过对水平阵和垂直阵的分析,得出以下结论:pxy 方法相对p2方法整体幅度上均有所抬升。但是对于水平阵,pxy 动态范围过小导致距离、深度上出现不少旁瓣,影响距离深度定位。
4.2 pvz和vrvz方法分析
考虑到vx=vr×cos θ,vy=vr×sin θ,所以pxy实际上是pvr的组合,角度是通过cos θ、sin θ的加权组合获得的,距离深度定位直接依赖于pvr.为了进一步分析pxy 在垂直阵和水平阵表现不同,在水平阵和垂直阵下分别进行pvz方法、vrvz方法仿真。为减少篇幅起见,就不给出对应的模糊度图,仅给出主旁瓣比。在水平阵匹配角度下,深度投影的主旁瓣比为:pvz方法为1∶0.505 5,vrvz方法为1∶0.488 8;在垂直阵匹配角度下,深度投影的主旁瓣比为:pvz方法为1∶0.218 9,vrvz方法为1∶0.189 1.可以看出无论是在垂直阵还是水平阵,vrvz方法比p 方法定位效果要好。按照第一部分对vrvz方法、pvz方法进行类似推导,得到vrvz方法的求和项为ψ2h(z's)ψ2h(z)·
5 结论
由于定向可以通过vx和vy,定深、测距可以通过p 和vz,经过上面分析得出如下结论:
1)在垂直阵下,p 方法有一定的距离、深度分辨能力,无法区分角度;pxy 方法同p 方法相比,距离和深度分辨能力相当,具有角度分辨且可以区分左右舷;xyz 方法同p 方法相比,距离和深度分辨能力有稍许提高,具有角度分辨且可以区分左右舷。
2)在水平阵下,p 方法有一定的距离、深度、角度分辨,但无法区分左右舷;pxy 方法同p 方法相比,距离、深度分辨能力有所下降,角度分辨有所提高且可以区分左右舷;xyz 方法同p 方法相比,距离和深度分辨能力有稍许提高,同时具有角度分辨且可以区分左右舷。
所以根据各种方法同p 方法作比较得到如下最终结论:本文将匹配场方法应用到矢量阵上取得声源的3 位定位:垂直阵时采用pxy 或者xyz 方法;水平阵时,采用xyz 方法。匹配场是水声物理和信号处理的结合,而矢量阵又能够提供更丰富的声场信息,二者的结合必定有广阔的应用前景。
References)
[1] Baggeroer A B,Kuperman W A,Mikhalevsky P N.An overview of matched field methods in ocean acoustics[J].IEEE Journal of Oceanic Engineering,1993,18(4):401 -424.
[2] Chen T,Liu C,Zakharov Y V.Source localization using matchedphase matched-field processing with phase descent search[J].IEEE Journal of Oceanic Engineering,2012,37(2):261 -270.
[3] Seong W,Byun S H.Robust matched field-processing algorithm based on feature extraction[J].IEEE Journal of Oceanic Engineering,2002,27(3):642 -652.
[4] 邱海宾,杨坤德.水平变化环境下的拖线阵海底参数反演研究[J].兵工学报,2011,32(3):298 -304.QIU Hai-bin,YANG Kun-de.Geoacoustic inversion of towed line array in range-dependent environment[J].Acta Armamentarii,2011,32(3):298 -304.(in Chinese)
[5] Thode A M,Gerstoft P,Burgess W C,et al.A portable matchedfield processing system using passive acoustic time synchronization[J].IEEE Journal of Oceanic Engineering,2006,31(3):696 -710 .
[6] Yang Kunde,Ma Yuanliang,Yang Yixin.A novel adaptive matched field processor with environmental mismatch and undersampling[C]∥2005 Fifth International Conference on Information,Communications and Signal Processing,2005:1269 -1273.
[7] 贾志富.同振球型声压梯度水听器的研究[J].应用声学,1996,16(3):20 -25.JIA Zhi-fu.On pressure gradient hydrophones with co-oscillating sphere[J].Applied Acoustics,1996,16(3):20 -25.(in Chinese)
[8] 孙贵青,李启虎.声矢量传感器研究进展[J].声学学报,2004,29(6):481 -490.SUN Gui-qing,LI Qi-hu.Progress of study on acoustic vector sensor[J].Acta Acoustica,2004,29(6):481 -490.(in Chinese)
[9] 王德俊.矢量声场与矢量信号处理理论研究[D].哈尔滨:哈尔滨工程大学,2004.WANG De-jun.Research on vector field and signal processing theory[D].Harbin:Harbin Engineering University,2004.(in Chinese)
[10] Gulin O E,Yang D S.On the certain semi-analytical model of low-frequency acoustic fields in term of scalar-vector description[J].Chinese Journal of Acoustics,2004,23(1):58 -70.(in Chinese)
[11] Hawkes M,Nehorai A.Acoustic vector-sensor correlations in ambient noise[J].IEEE Journal of Oceanic Engineer,26(3):337 -347.
[12] 孙贵青.矢量水听器检测技术研究[D].哈尔滨:哈尔滨工程大学,2001.SUN Gui-qing.Research on vector sensor’s detection technique[D].Harbin:Harbin Engineering University,2001.(in Chinese)
[13] 彭汉书.由矢量水听器阵列反演浅海地声参数[J].声学技术,2008,27(2):163 -167 .PENG Han-shu.Geoacoustic inversion from vector hydrophone array in shallow water[J].Technical Acoustics,2008,27(2):163 -167.(in Chinese)
[14] Porter M B.The KRAKEN normal mode program[CP].SACLANT Undersea Research Centre Memorandum (SM-245)/Naval Research Laboratory Mem.Rep.6920 (1991).
[15] 张同伟,杨坤德,钱琛,等.浅海中水平线列阵深度对匹配场定位性能的影响[J].物理学报,2010,59(5):3294 -3301.ZHANG Tong-wei,YANG Kun-de,QIAN Chen,et al.The performance of matched-field localization with a horizontal line array at different depths in shallow water[J].Acta Physica Sinica,2010,59(5):3294 -3301.(in Chinese)
[16] 彭汉书.浅海声场矢量物理特性及应用研究[D].北京:中国科学院声学研究所,2007:38 -44.PENG Han-shu.Research on physics property and application of the acoustic vector in shallowwater[D].Beijing:Institute of Acoustic,Chinese Academy of Sciences,2007:38 -44.(in Chinese)
猜你喜欢
压电与声光(2022年3期)2022-07-16
舰船科学技术(2022年11期)2022-07-15
电声技术(2022年3期)2022-04-28
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
科学技术创新(2020年19期)2020-07-03
物理实验(2020年3期)2020-04-18
电子制作(2019年23期)2019-02-23
汽车工程(2018年12期)2019-01-29
电子制作(2016年19期)2016-08-24
舰船电子工程(2015年4期)2015-03-15