专家式PID调节器的设计与实现
2012-04-13 04:58龙飞
科技传播 2012年12期
龙 飞
扬州光电产品检测中心,江苏 扬州 225007
PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于过程控制和运动控制中。
1 专家式PID调节器的特点
本文设计和实现的对象是一种新型的PID类调节器——专家式PID调节器,它集中了常规PID控制和专家控制两者的优点,在保留常规PID精度高的基础上,可以实现小超调或无超调控制,并且基于专家经验使之具有接近于人类操作经验的控制性能。
2 专家式PID调节器的原理
专家控制的原理就是利用各种基于受控对象和控制规律的知识以智能的方式来控制受控对象。我们把利用专家知识和经验来设计PID参数的控制方式称为专家PID控制方式。
如图1所示是一个典型的二阶系统单位阶跃响应误差曲线,其单位阶跃响应分析如下:
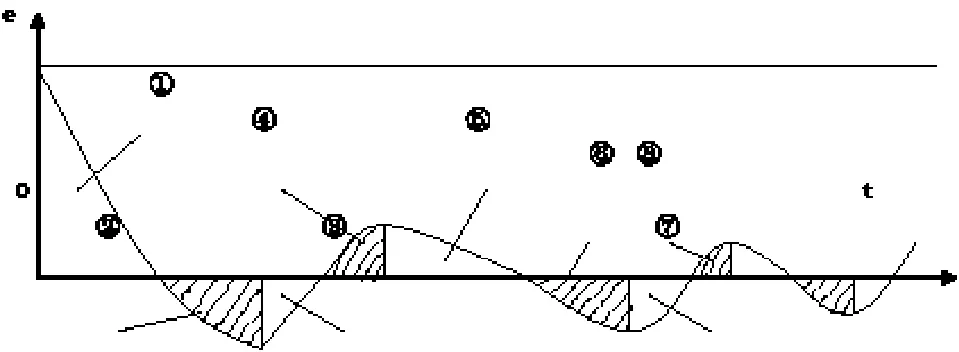
图1 一个典型二阶系统单位阶跃响应误差曲线
如果把当前采样时刻、前一个和前两个采样时刻的响应误差值e(已离散化)分别用e(k)、e(k-1)、e(k-2)表示,则有 :⊿ e(k)= e(k)-e(k-1)
⊿ e(k-1)= e(k-1)-e(k-2)
基于误差e和误差变化ec的不同关系,可分为以下五种情况来设计专家式PID调节器:
(a)若 |e(k)| > M1,则表明误差e绝对值已经超过设定的较大界限。在这种情况下,我们应尽快调节误差,使误差绝对值尽可能减小,按最大(或最小)输出设计PID调节器。这种情况相当于开环控制。
(b)若e(k)⊿e(k)>0,则表明误差绝对值正在不断增大,或者误差e保持恒定。有以下两种情况:(1)若 |e(k)| <M2,表明尽管误差绝对值正不断增大,但并没有超过一定界限,此时只要使误差绝对值向相反方向变化即可,因此可设计调节器实施一般控制,调节器输出为:
u(k)=u(k-1)+kp[e(k)-e(k-1)]+kie(k)+ kd[e(k)-2e(k-1)+ e(k - 2)]
(2)若|e(k)|≥M2,表明此时误差e已超过了设定的较小界限,此时应使误差绝对值朝减小方向变化并使其值迅速减小,可设计调节器实施较强控制,调节器输出为:
u(k)=u(k-1)+k1{kp[e(k)-e(k-1)]+kie(k)+kd[e(k)-2e(k)+e(k-2)]}
(c)若 e(k)⊿ e(k)< 0、⊿ e(k)⊿ e(k-1)> 0 或者e(k)= 0,则表明误差绝对值正在不断减小,或者输出达到了动态平衡。此时,可设计调节器使其输出不变。
(d) 若 e(k)⊿ e(k)< 0、⊿ e(k)⊿ e(k-1)< 0,则表明误差处于极值状态。也有以下两种情况:
(1)若 |e(k)| < M2,可设计实施较弱控制:u((k)=u(k-1) +k2kpem(k)
(2)若 |e(k)|≥ M2,可设计实施较强控制 :u(k)= u(k-1)+k1kpem(k)
(e)若 |e(k)|≤ε,则表明误差绝对值已足够小,设计时可增加积分环节,降低稳态误差。
说明:em(k)-第k个误差e的极值(k为控制周期序号,k=1,2,3,……);u(k)、u(k-1)-调节器的第k、k-1次输出; k1-增益放大系数,k1 >1;k2-抑制系数,0 < k2 <1;M1,M2-根据专家经验设置的误差界限,M1 > M2;ε-任意小的正实数。
图1中,①、③、⑤、⑦、…区域,误差绝对值正在不断减小。此时可实施等待保持措施,相当于实施开环控制;②、④、⑥、⑧、…区域,误差绝对值正在不断增大。此时为降低动态误差,根据误差数值高低,可分别设计调节器实施较强或一般控制。
3 专家式PID调节器的设计
PID控制系统采用阶跃输入,即输入 rin(t)=1,这是因为:系统采用阶跃输入通常认为是将系统处于最严峻的工作状态。因此我们通常在阶跃激励作用下,测定或计算系统的动态响应性能。系统在阶跃激励作用下如果其动态性能达到设计目标,那么系统在其它形式的激励作用下,其动态性能也会达到预期目标。
采样周期ts=0.10s。
控制对象的传递函数为:

其中,yout为控制系统的输出,u为调节器的输出,K=2.10为比例系数,τ=4为延迟时间
将上述控制对象的传递函数应用z变换进行离散化,离散化后的控制对象为:

其中,den为离散化后得到的控制系统输出yout的系数,num为离散化后得到的调节器输出u的系数。
其中,error为控制系统的偏差。

专家式PID控制系统框图如图3-1所示,其中ZOH(s)为零阶保持器,采用零阶保持器的作用是保持采样信号,F为反馈系数。
编写仿真程序。编程的核心是依据上节阐述的设计方法,对应控制算法中的五种情况分别编写程序中的五条规则,根据专家式PID控制算法得到其程序框图如图2所示。
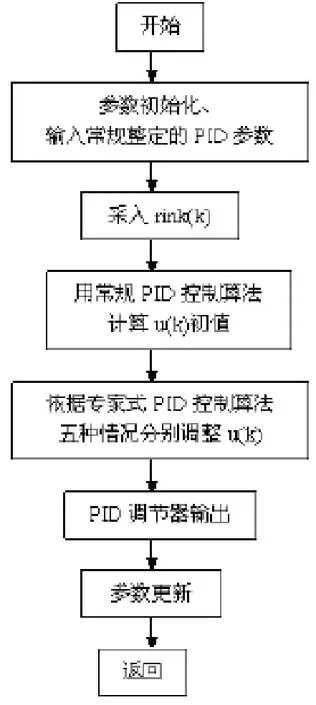
图2 专家式PID控制算法程序框图
4 专家式PID调节器的MATLAB仿真与性能评估
4.1 仿真程序
其中对象采样时间为0.10s。T1、T2的取值取得比较大是考虑到实际工业生产中多为大惯性系统,这样调节器的设计会更接近于实际。
采用专家式PID控制算法设计调节器。在仿真过程中,ε取0.001,程序中的五条规则与控制算法的五种情况相对应。为了便于比较并进行性能评估,程序中加入了采用常规PID控制算法设计的调节器,并使得两种调节器在同一幅阶跃响应曲线图和误差响应曲线图中显示。
4.2 仿真结果
阶跃响应曲线图和误差响应曲线图如图3至4所示。
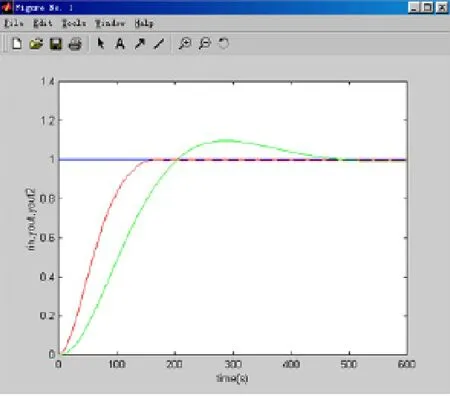
图3 专家式PID 调节器和常规PID调节器阶跃响应曲线图
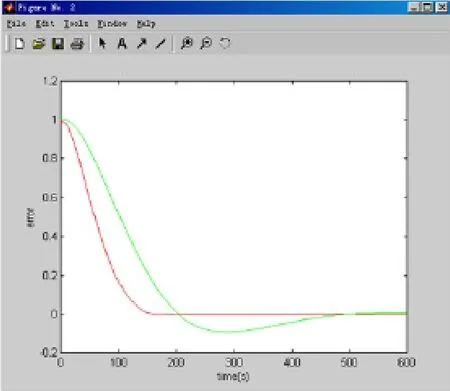
图4 专家式PID 调节器和常规PID调节器误差响应曲线图
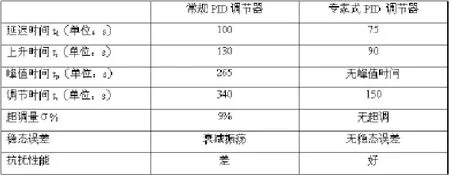
4.3 性能评估
通过比较专家式PID和常规PID调节器的阶跃响应和误差响应曲线图,我们可以对专家式PID 调节器的性能作出评估:
5 结论
虽然PID控制具有较好的鲁棒性,能满足一般工业控制要求,但是对于具有大纯滞后、非线形或时变过程,常规PID调节器常常不能满足要求,本文设计和实现的专家式PID 调节器依据控制算法的不同情况、通过智能地控制调节器的输出u(k)来迅速调整系统的误差e(k),从而满足了控制系统的要求,它具有如下优点:
1)该调节器能根据误差、误差变化的实际情况,灵活自动地选取相应的控制律,以获得良好的动、稳态性能;
2)对于大纯滞后的控制对象的调节效果,专家式PID 调节器均优于常规PID调节器;
3)该调节器结构简单、编程方便、实时性好、计算时间短,易于实现;
4)该调节器具有良好的抗干扰能力和适应性。
[1]陶永华,尹怡欣,葛芦生编著.新型PID控制系统及其应用.北京:机械工业出版社,1998.
[2]刘金琨.先进PID控制及其MATLAB仿真.北京:电子工业出版社,2003.
[3]林敏,薛红.计算机控制技术与系统.北京:中国轻工业出版社,1999.
[4]胡寿松.自动控制原理.北京:国防工业出版社,1994.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19
矿山安全信息(2021年21期)2021-07-04
矿山安全信息(2020年37期)2020-12-26
矿山安全信息(2020年2期)2020-03-05
矿山安全信息(2020年3期)2020-03-04
天津教育·下(2018年9期)2018-07-13
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
电力自动化设备(2013年11期)2013-09-18