地面运动目标振动信号的特性分析与目标识别
2012-04-24 08:12王斌
电子科技 2012年9期
王 斌
(武警工程大学研究生管理大队,陕西西安 710086)
随着民用和军用工业的发展,无论是桥梁监控、仓库监视,还是在军事上对哨位监视、战场探测及人迹罕见恶劣条件的边远地区巡逻,地面探测是不可或缺的一个维度。人员、车辆、装备等目标地面上运动,必然会发出声响、引起地面振动,而地面传感器即可以通过探测这些物理量的变化来发现与识别运动目标。地面目标运动形成振源,其产生的地振波以纵波、横波和瑞利波等形式在地球介质中传播。纵波传播速度快、频率高;横波速度低、能量较弱;而瑞利波频率较低、能量较强,其主要频率成分集中在0~150 Hz范围内。因此在进行振动目标识别系统设计时,主要考虑对150 Hz以内的信号进行处理。在均匀介质下瑞利波的频率与传播速度无关,且无频散性,因此,在获取地面目标信息时通常用瑞利波为分析对象[1]。
对地面运动目标的振动信号特性分析,就是将振动信号作变换处理,从中提取出能够反映特定目标本质属性的特征信息,为实现目标的识别提供充分依据。在信号处理方面,目标信号的特性分析一般在时域和频域中进行。在时域中,单人行走与车辆行驶产生的波形之间有明显的区别。无论是人员行走还是车辆行驶产生的振动信号,在频域中都能找到对应各自信号的特征信息,特别是单人行走与多人随机行走产生的波形,在时域中找不到明显的区别,因此对其采用频域分析是重要的。所以采用时域和频域两种方法对目标信号特性进行分析。
1 信号样本数据库的建立
信号的特征是能够反映目标本质属性的特征信息。目标识别主要是对地面运动目标产生的振动信号进行特征信息的分析与提取,从而识别目标。其根本的方法是匹配,即把分析提取的目标信号特征归属于样本库中和其信号特征相匹配的某一个目标类型,最终根据已知样本库中的目标进行分类识别[2]。所以,要对目标进行识别,建立一个包含所有可能对应目标属性的特征信息的数据库尤为重要。
根据文中的应用需求和使用到的算法,信号样本数据库至少包含3种地面运动目标信号,以及这3种目标所对应的特征信息属性,为地面运动目标振动信号的识别提供原始样本。
在实验测试中,以人员、车辆为典型目标,多次定点采集运动目标的信号。实验条件为良好的水泥地质,环境良好。主要做了以下实验:(1)测试单人行走和多人随机行走产生的地表面振动,定点采集各种距离的信号。(2)测试车辆行驶产生的地表面振动,定点采集各种距离的信号。从中采集和提取目标振动信号的特征信息,并建立信号样本数据库。
2 时域分析
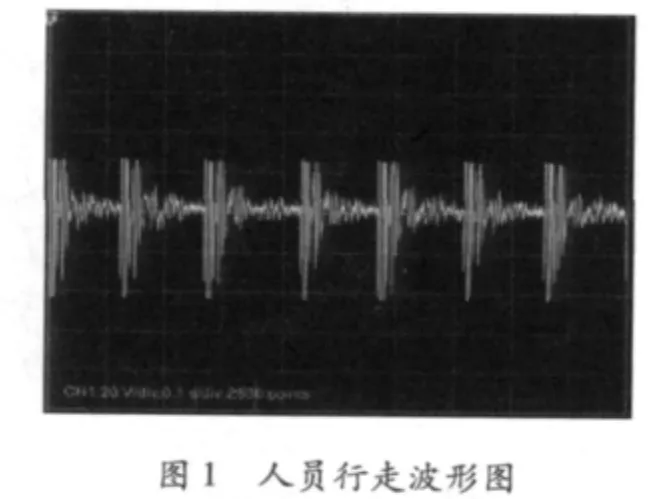
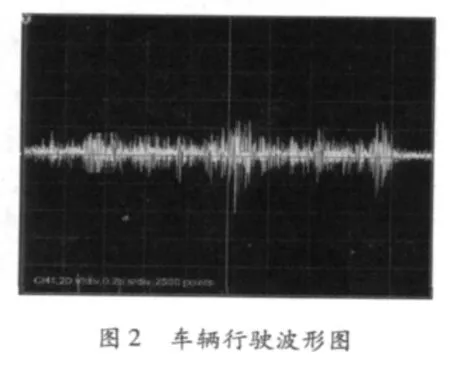
地面目标激励下产生的地面振动信号,主要取决于地质条件、目标的运动状态和目标的距离[3]。图1和图2是用软件KEIL MDK对在外场试验采集地面目标运动产生的振动信号生成的时域图,为便于分析,取时间长度为3 s。时域图的横轴和纵轴分别表示采集的时间和信号幅度。如图1和图2所示,人员行走、车辆行驶产生的地振动信号在时域上具有以下两个基本特征[2]:一是地振动的目标信号同目标与传感器之间的距离有关,随着距离的增大,信号的幅度值逐渐减小;二是由于人的走动对地面的冲击是短暂的,而且相邻步伐之间的时间间隔基本相同,约为0.5 s,所以人员脚步信号具有的特征为每个脚步信号可以看成是周期脉冲式的,近似为离散的;而车辆运动时由于发动机连续发动所产生,故其产生的信号是连续,当然它还取决于车架悬挂系统自振以及传动系统振动等。
2.1 过零数算法原理
过零数是指某一段时间内时域信号的幅度值经过特定阈值的总次数,用这个次数作为地振动信号的时域特征。信号的过零数与采样率密切相关。在信号采样率不变的情况下,信号的过零数与频率有着直接的关系。
若某正弦信号的频率为f,则过零数为

即过零数与频率成正比,其中k为比例系数。过零数与信号幅值无关,所以该方法抗干扰能力比较强,在语音、地震动信号识别等方面有广泛的应用。
对于频带范围从f1到f2的平稳高斯随机信号,单位长度内的过零点数与功率G(f)之间存在的关系为
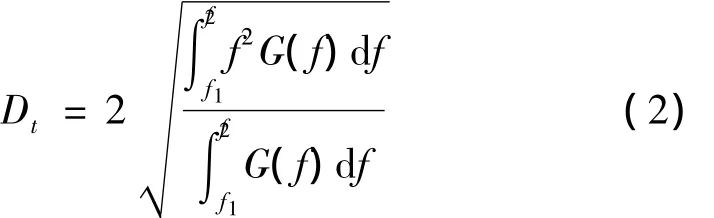
从式(2)可见,若信号的主频f0越高,单位长度内的过零数就越多;若信号的主频f0越低,单位长度内的过零数就越少[2]。
2.2 基于过零数分析的目标识别
从图1和图2中可知,脚步作用时间很短,信号可近似为周期性的脉冲,而车辆信号是连续的,且脚步信号的频数远低于车辆信号的主频,即车辆行驶产生的振动信号的过零数在某段时间内明显多于单人行走信号。所以只要确定的过零阈值在某段时间内使得计算出两类信号的过零数差距够大,就能有效识别出这两种目标。
从实验采集的信号数据库中分别随机抽取15组人员和车辆的样本信号,并分别计算过零数。由于采样频率为1 kHz,采样时间为3 s,所以每组数据有3000个点。对各组信号进行过零数统计如表1所示。
表1 人员和车辆目标信号过零数统计
从表1可知,在15个单人行走样本信号的过零数统计中有14个<110,15个车辆行驶样本信号的过零数统计中有14个>110,即在单位长度内车辆行驶信号的过零数远大于单人行走信号的过零数,所以可通过对单位长度内信号的过零数比较进而识别人员和车辆两种目标。若将过零阈值设定为110,则信号的过零数<110时,识别为人员目标;信号的过零数>110时,识别为车辆目标。对于表1统计的过零数数据,可计算出人员和车辆的正确识别率均为14/15=93.33%。
3 频域分析
信号的频谱分析是研究信号特性的重要手段之一[4]。对于确定信号,可以用傅里叶变换分析其频谱性质,而对于广义平稳随机信号,由于它一般既不是周期信号,又不满足平方可积,严格来说不能进行傅里叶变换,所以通常采用信号的功率谱来进行频谱分析。由于地面目标运动引起的振动信号可以近似为广义平稳随机信号,所以文中对振动信号进行功率谱分析,提取信号特征,从而进行目标识别。然而,实际应用中的广义平稳随机信号一般是有限长的,只能根据有限长的信号来估计原始信号真实的功率谱,这就是功率谱估计问题。
由于周期图法的方差性能差,且Bartlett法方差的改善是以牺牲分辨率为代价,所以文中采用Welch法。
3.1 Welch法算法原理
Welch谱估计法是对Bartlett法的改进,目的是在保持Bartlett法方差性能的同时改善其分辨率,又称加权交叠平均法。其基本原理是:首先,将数据xN(n)分成M段,得到分段数据xN,i(n),可使每一段的部分数据重叠,然后采用一个合适的窗函数对每一段数据进行平滑处理,其次,对各段功率谱PER,i(w)求平均,得到PER(w)。若所有分段数据xN,i(n)的长度都为L,而且规定每段数据重合1/2,则数据xN(n)的总长度为N=(M+1)L/2。可得
3.2 基于Welch法的目标识别
通过对单人行走和多人随机行走产生的振动信号用Welch法进行仿真实验,所得的功率谱如图3和图4所示。由图3和图4可知:单人行走产生的振动信号在频率为40 Hz附近的功率较大,大约在频率为120 Hz附近也有较高功率。而多人以随意的脚步行进时,因为不同的人在不同的时刻对地面产生冲击,信号在时域内正负叠加相消,幅值反而比较小,表现在功率谱域内,其能量较小,谱峰频率主要集中在30 Hz、40 Hz和70 Hz附近。
从实验采集的信号数据库中分别随机抽取6组单人行走和多人随机行走信号,进行Welch法分析,得到两种信号的谱峰频率和谱峰相对强度统计表如表2所示。经目标统计可得信号功率谱特征如表3所示。从表2和表3中根据功率谱的特征信息对单人行走和多人随机行走两种目标可进行识别,即先比较谱峰强度,若谱峰强度在-5~0 dB和15~20 dB之间,则确认为多人目标;若谱峰强度在0~15 dB之间,再比较谱峰频率,若谱峰频率仅在40 Hz附近,则确认为单人目标,若谱峰频率主要集中在30 Hz、40 Hz和70 Hz附近,则确认为多人目标。可见该算法简便、易行,效果好。
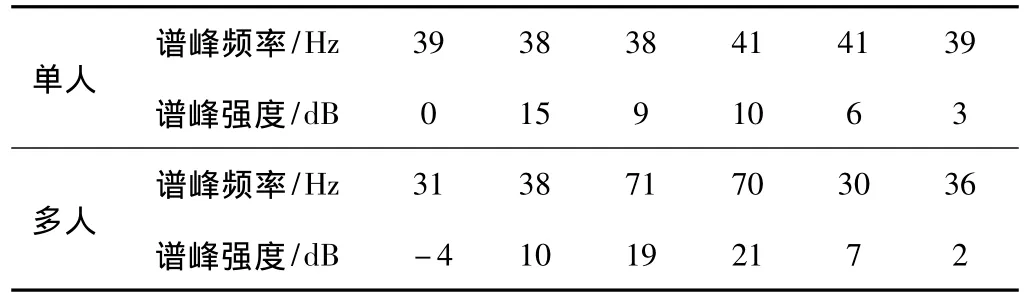
表2 目标信号功率谱特征统计
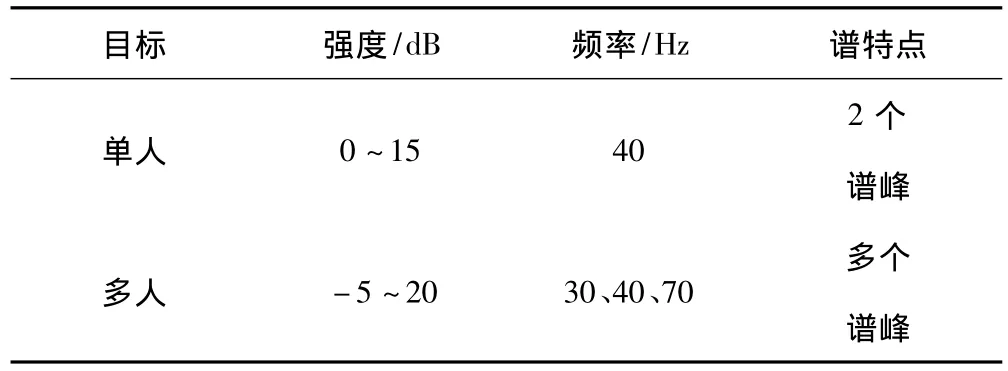
表3 目标信号功率谱特征
4 结束语
对单人正常行走、多人随机正常行走以及车辆正常行驶3种地面目标运动产生的振动信号进行了时域和频域分析,实验结果表明:过零数分析法对于单人和车辆目标的正确识别率高,但对于单人和多人目标信号的识别还欠考虑;而Welch谱分析法对于单人和多人随机行走目标的识别非常有效,且简便形象。但在实际情况下,有多人齐步行走、跑步以及人与车混合等多种情况,此时就要采用时频域相结合,从中提取不同目标的特征向量,利用D-S算法和BP神经元算法相结合,可以提高识别的正确率。
[1] 朱亚坤.基于传感器阵列的振动目标识别与定位技术研究[D].西安:武警工程大学,2012.
[2] 徐照胜.地震动传感器的目标检测和识别算法研究[D].合肥:安徽大学,2010.
[3] 蓝金辉.目标地震动信号的特征提取及识别研究[J].振动与冲击,2001,20(4):42 -44.
[4] 宋宁,关华.经典功率谱估计及其仿真[J].现代电子技术,2008,33(11):159 -161.
猜你喜欢
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
睿士(2020年6期)2020-08-18
中学生数理化·八年级物理人教版(2019年6期)2019-06-25
测控技术(2018年11期)2018-12-07
妈妈宝宝(2017年3期)2017-02-21
系统工程与电子技术(2016年7期)2016-08-21
华人时刊(2016年1期)2016-04-05
西北工业大学学报(2015年4期)2016-01-19