对转鱼雷永磁同步推进电机直接转矩控制系统设计
2012-05-28 01:15徐海珠谢顺依连军强
水下无人系统学报 2012年1期
徐海珠, 谢顺依, 连军强, 王 鼎
对转鱼雷永磁同步推进电机直接转矩控制系统设计
徐海珠, 谢顺依, 连军强, 王 鼎
(海军工程大学 兵器工程系, 湖北 武汉, 430033)
为了提高鱼雷电机的效率和转矩密度, 介绍了对转永磁同步电机的结构, 探讨了对转永磁同步电机的直接转矩控制技术, 推导了对转永磁同步电机的数学模型, 建立了电机仿真模型, 分析了电机设计原理。为了保持双转子的等速, 设计了一种新型对转永磁同步电机的直接转矩控制系统, 提出了电机扰动情况下的双转子转速跟随方案, 并进行了仿真。仿真结果和理论分析吻合, 证明了直接转矩控制技术可以很好地实现对转永磁同步电机的调速, 且控制过程简单, 转矩响应迅速, 鲁棒性强。
鱼雷; 对转永磁同步推进电机; 直接转矩控制; 转速跟随; 扰动
0 引言
水下航行器航行过程中需要稳定姿态, 大多采用对转螺旋桨推进系统以克服陀螺效应[1]。对转永磁同步电机[2]比功率大、可靠性高、效率高、成本低、转矩脉动小、散热效果好、结构紧凑、可靠性高、无陀螺效应, 可直接驱动对转螺旋桨推进系统, 成为水下电力推进领域的研究热点。
1 电机结构和原理
1.1 电机结构
对转永磁同步电机由1个定子和2个对转的永磁转子组成[3], 图1为对转永磁同步电机的结构示意图。如图1所示, 外转子的内表面和内转子的外表面安装径向磁化的永磁体, 定子两侧统一开槽并安装螺线管绕组, 绕组端部大大缩短, 绕组利用率大幅提高, 发热和端部漏磁也大幅减小[4]。因为内外气隙都得到利用, 可以得到更高的功率密度。电枢内外2层绕组的相序相反[5], 所以2层电枢各自产生等速而异向旋转的磁场, 进而在2个转子上产生等大而反向的电磁转矩, 直接驱动对转螺旋桨推进器。
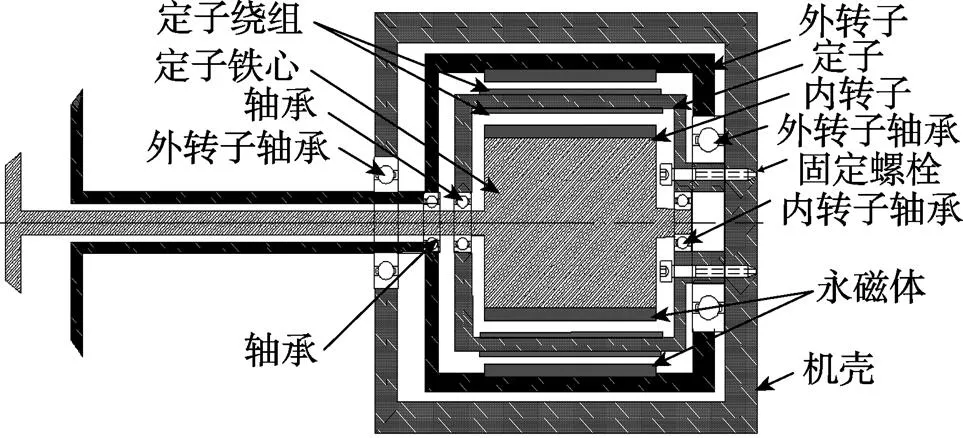
图1 对转永磁同步电机结构
对转永磁同步电机目前还没有成熟的研究方法, 将其分解为内电机和外电机(定子内侧绕组和内转子构成内电机, 定子外侧绕组和外转子构成外电机)。本文借鉴传统永磁同步电机研究方法, 先对2个电机分别进行研究, 再通过二者的磁场耦合和结构约束进行集成优化。
1.2 设计原理
根据电机工作原理和数学模型, 可得到内电机和外电机的电磁关系
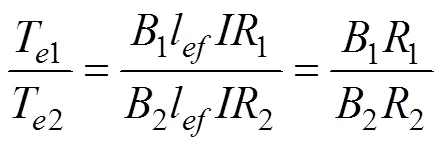
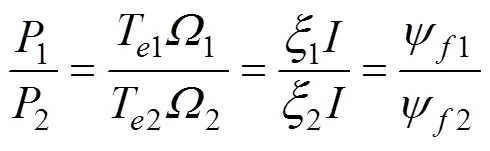
式中:1和2,1和2,1和2,和,1和2,1和2分别为内外转子的半径、磁密、反电势、磁链、电磁功率和转速;l为电枢的有效长度;为电枢电流。由式(1)和式(2)可知, 当内外转子的磁密与外径成反比时, 二者转矩相等。设计使两转子转动惯量与阻尼系数相等, 可使两转子转速相等。内转子使用钕铁硼永磁体以增大气隙磁密, 外转子使用铁氧体永磁体以降低成本。
2 直接转矩控制技术
直接转矩控制采用定子磁场定向, 应用空间矢量分析, 维持定子磁链幅值恒定, 借助于离散的两点式调节产生脉宽调制信号, 直接对逆变器的开关状态进行控制, 调节定子磁链的旋转速度以动态调整转矩角, 使电机输出转矩跟踪给定转矩[6]。直接转矩控制无需矢量控制的对转子磁场精确定向, 避免了解耦和复杂的坐标变换, 磁链的估计仅涉及定子电阻, 转矩响应迅速、结构简单、鲁棒性强、控制性能优良, 受到了广泛关注。
借鉴传统永磁同步电机的数学模型, 在通常假设条件下, 建立对转永磁同步电机的坐标系下数学模型

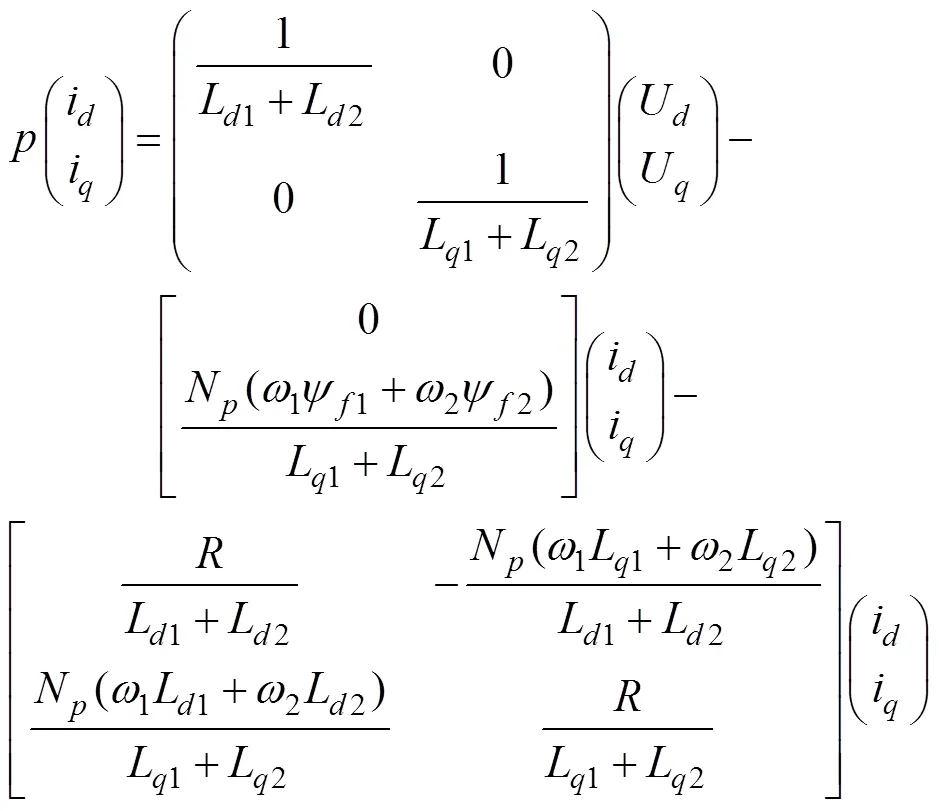
式中:U和U,i和i为电机轴电压和电流;表示对时间的导数;n为电机极对数;L1和L1为内转子的轴电感;L2和L2为外转子的轴电感;1和2, ψ1和ψ2为内外电机的转矩角和定子磁链;和,ω1和ω2,1和2, T1和T2,T1和T2,1和2,Fe1和Fe2分别为内外转子的永磁磁链、电角速度、转动惯量、电磁转矩、负载转矩、阻尼系数和铁耗功率。
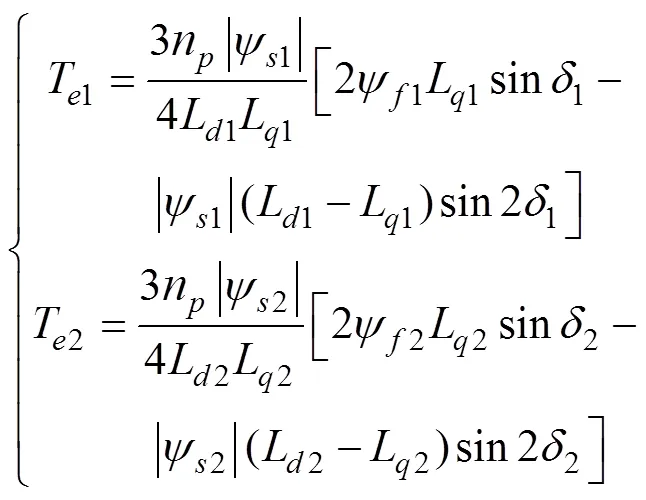
由式(5)可知, 保持定子磁链为恒定值, 电机的电磁转矩随着转矩角的变化而变化。
3 电机模型
根据上文的数学模型, 建立电机的仿真模型, 其中轴的电压-电流仿真模型如图2所示。
对2个转子分别输入负载转矩和电磁转矩, 可探索2个转子在相同条件和不同条件下电机的特性, 电机的机械模型如图3所示。
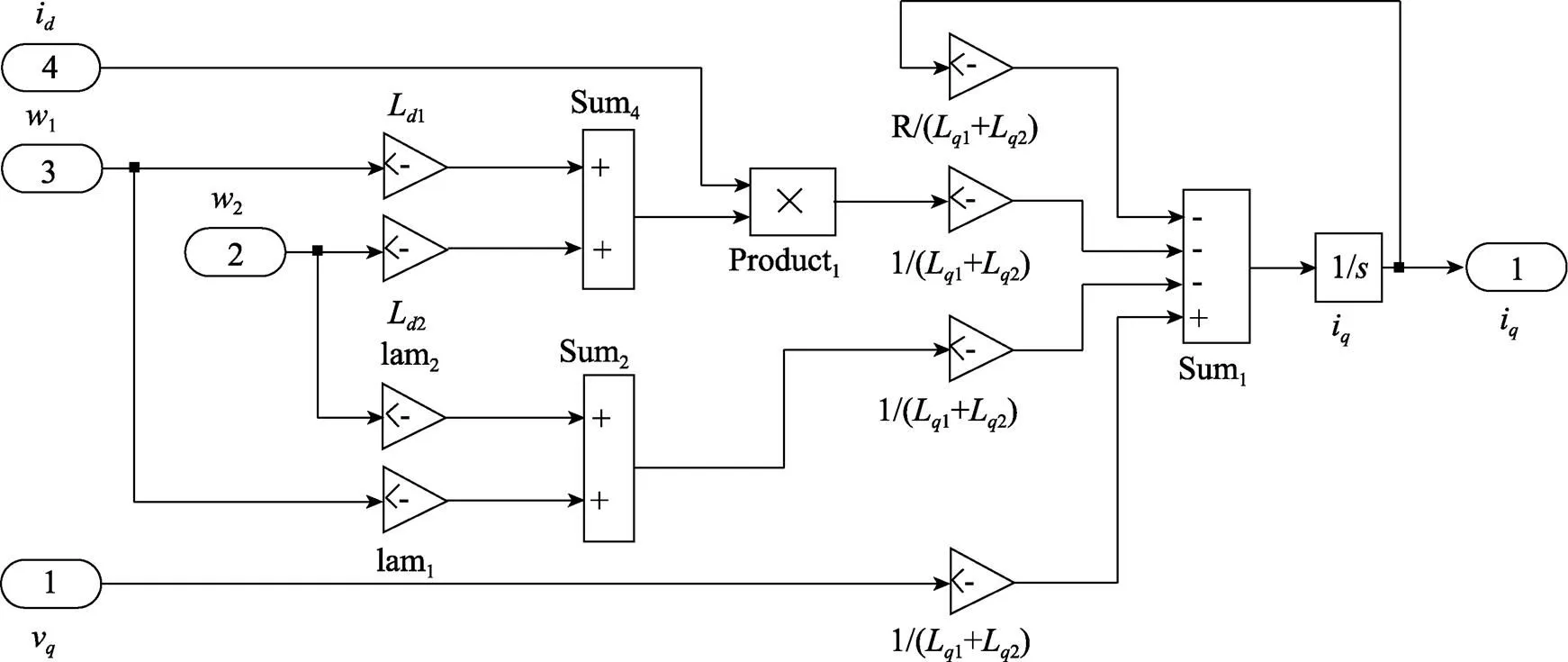
图2 电气模型(q轴)
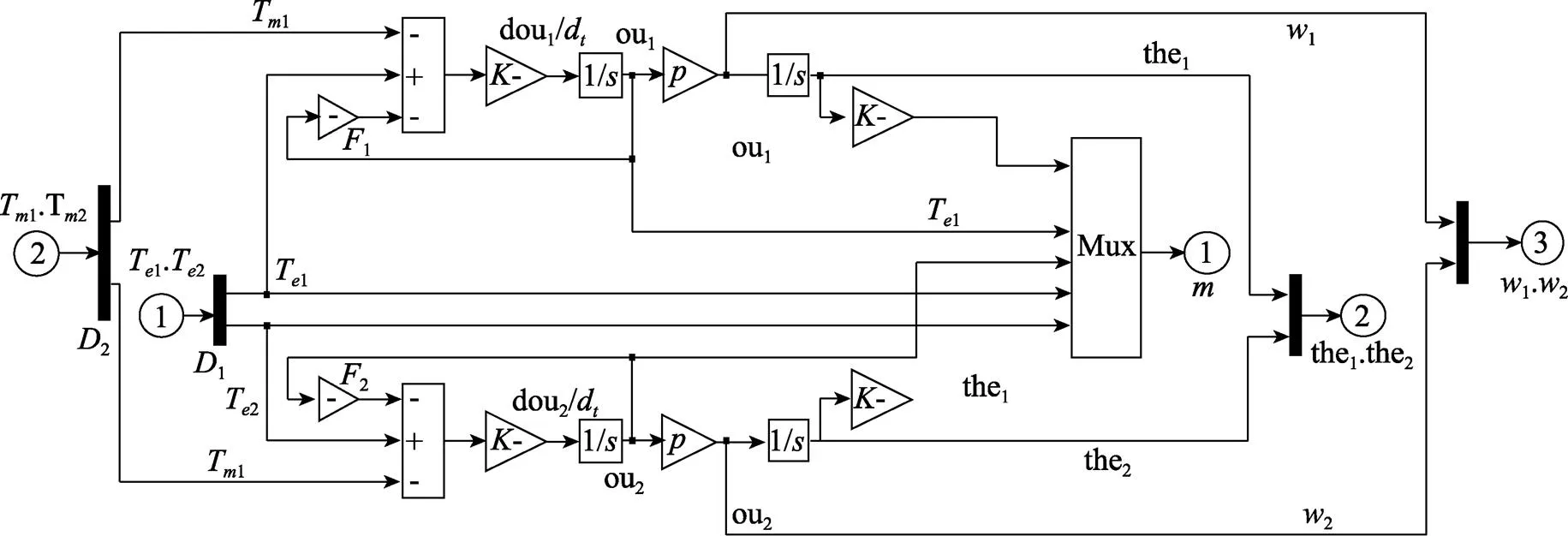
图3 机械模型
4 控制系统
4.1 控制过程
对转永磁同步电机直接转矩控制系统(见图4)的控制过程: 检测逆变器的直流母线电压和电机的两相电流, 计算出电机反电势, 积分以估计定子磁链; 根据估计的磁链和实测电流来计算电机的瞬时转矩; 根据定子磁链来判别其位置; 电机实际转速与给定速度比较后, 经调节器输出转矩给定, 与瞬时转矩相比较, 经滞环比较器产生转矩控制状态量; 定子磁链给定值与实际值比较后经滞环比较器也产生磁链控制状态量。根据3个控制信号,和来综合查询电压空间矢量表, 输出逆变器驱动控制信号, 选取电压矢量, 既保证每个划分扇区中转矩的最大变化, 又保证定子磁链在一定范围内其平均值基本不变。
4.2 控制策略
当电机受到扰动时, 2个转子的转速不再相等, 难以进行控制。但对转永磁同步电机中, 内外电机的电枢电路串联, 仅需要对定子电流进行控制, 就可以完成双转子的转速和转矩调节。本系统采用转矩、磁链双闭环控制, 分别计算内外转子的转矩, 对转矩变化较大者进行调节, 便于稳定转速, 减小脉动。系统采用外转子转速计算参考转矩, 并使用参考磁链来调节外转子磁链, 可以让内转子转速跟随外转子转速。对内外转子转矩变化较大者进行调节, 并使内转子转速跟随外转子转速, 可以保证电机扰动后2个转子转速迅速恢复相等。
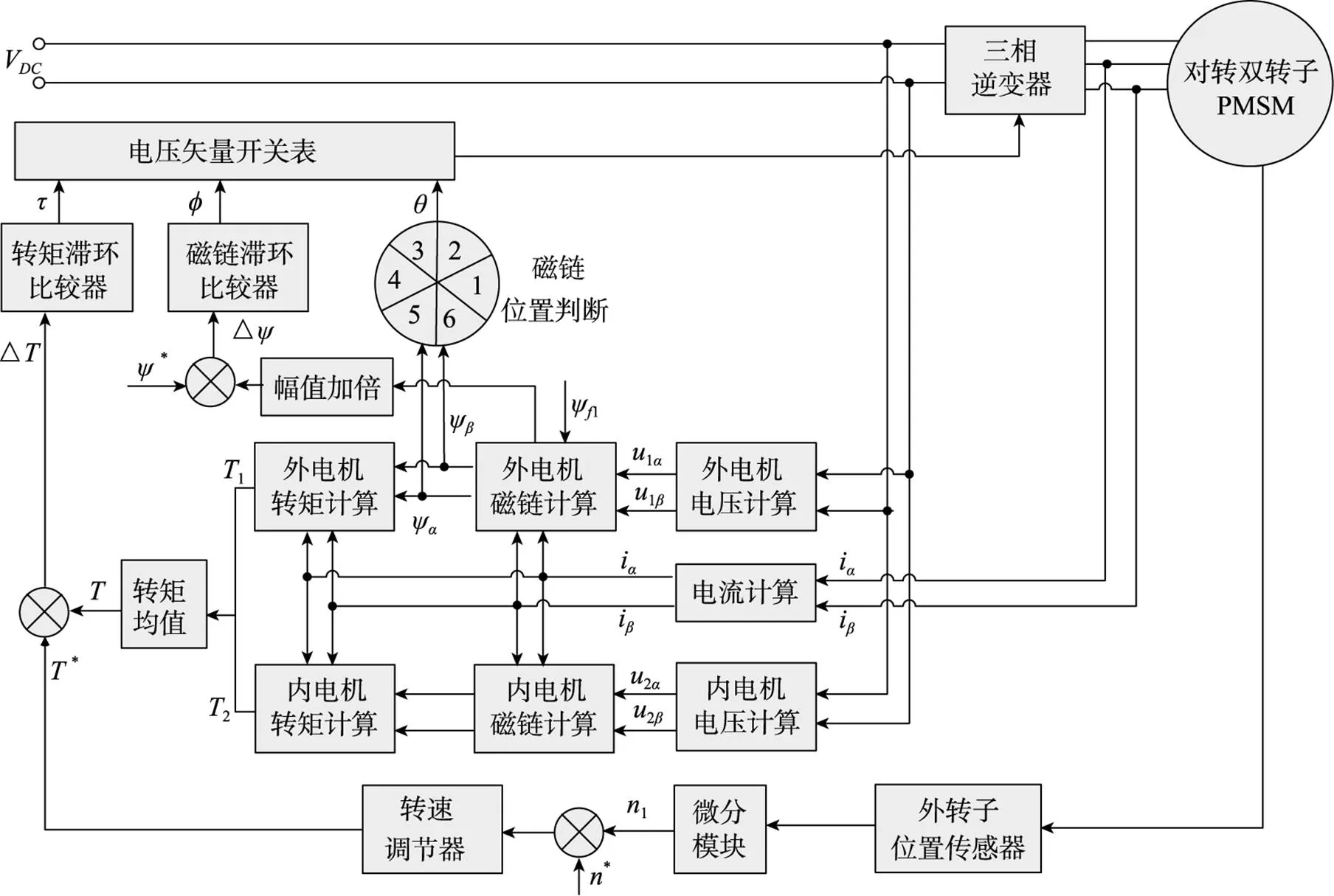
图4 对转永磁同步电机直接转矩控制系统
4.3 开关电压表
转矩角的变化量为
由式(6)可知, 转矩角的变化量为定子磁链位置增量与转子磁链旋转角之差。由于定子磁链由电压空间矢量驱动, 其时间常数远小于转子机械时间常数[7], 故可忽略转子位置变化。故通常使用电压矢量快速、线性地改变定子磁链的幅值和角度, 并改变电机的转矩。
根据所选运动矢量和零矢量的不同, 永磁同步电机开关表中的转矩可处于增加、保持和减小3种状态(对应为1,0,-1), 当实际转矩与给定转矩误差在给定误差环宽范围内时, 选用零矢量以保持转矩输出, 减少逆变器开关次数和转矩脉动, 磁链和电压控制规律如式(7)、式(8)和表1所示。
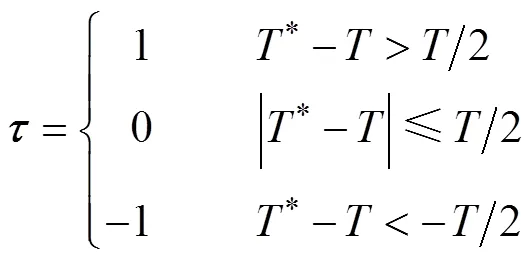
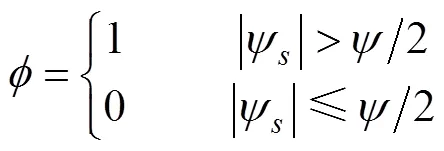
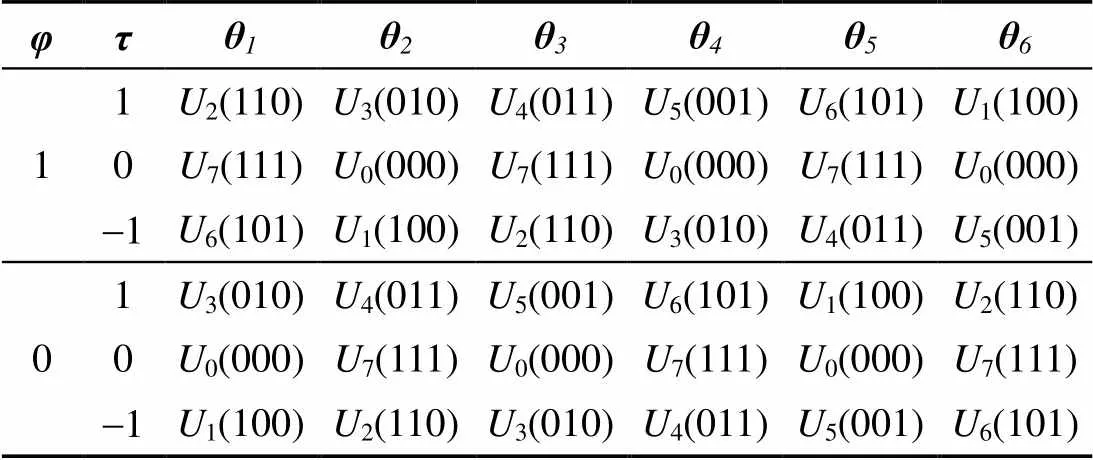
表1 电压矢量开关表
5 仿真结果及分析
系统参数如下: 极对数为6, 额定功率为15 kW, 两转子的额定转速均为1000r/min, 电阻0.05Ω, 内外电机的交、直轴电感均为0.35 mH, 粘滞系数和转动惯量均为0.065 N·m·s和0.75 kg·m2。仿真时间0.6s, 在0.1s时设置两转子负载为[8,14] N·m, 模拟电机扰动。在0.2s时负载突降为[3,5] N·m, 0.4s时负载骤增为[20,20] N·m, 得到电机转速、转矩响应。
电机转矩响应如图5所示, 启动后转矩较大, 因扰动0.1s时转矩在12N·m附近震荡, 0.2s负载突降后很快稳定在3 N·m, 0.6 s负载骤增后又迅速稳定到20 N·m。
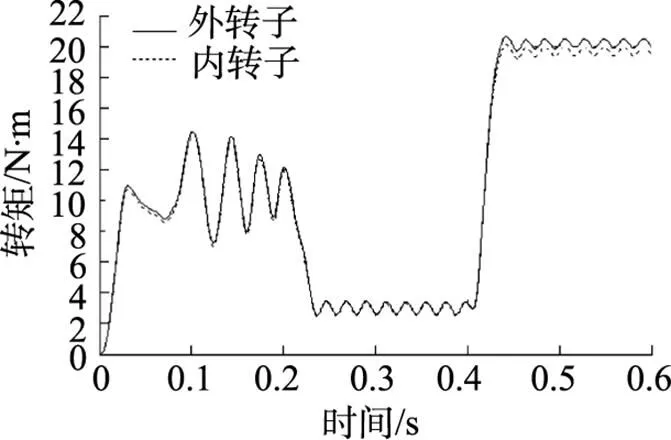
图5 转矩响应曲线
图6为电机两转子的转速曲线, 0.1 s时, 由于电机扰动, 两转子负载产生差异, 转速差别逐渐增大, 但在相同的参考转速和内外转子转速跟随的条件下, 经过0.05 s, 两转子转速差异越来越小, 最终趋于相等, 转速差值曲线如图7。
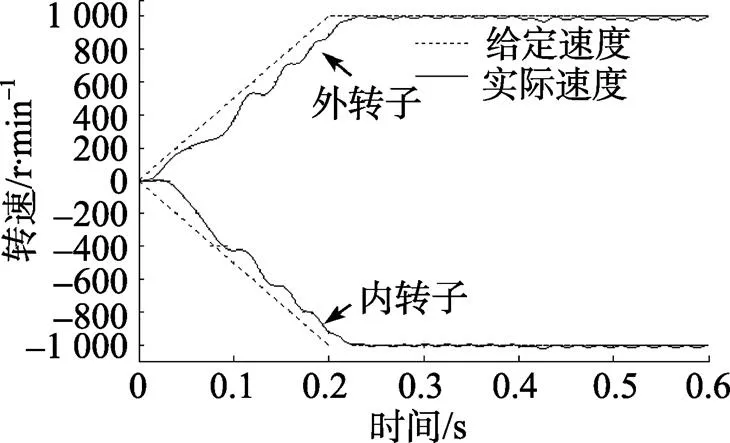
图6 转速响应曲线
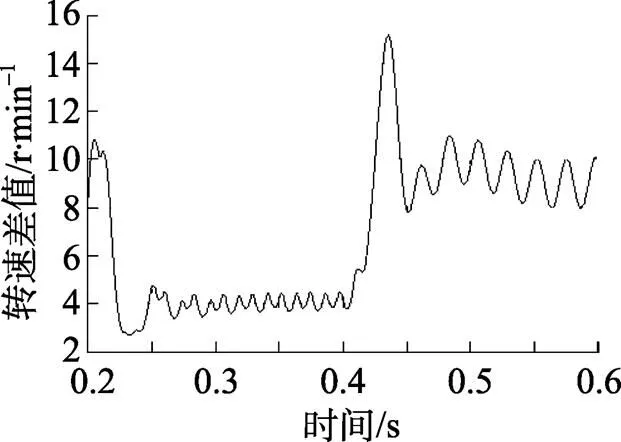
图7 转速差值响应曲线
6 结束语
根据对转永磁同步电机的工作原理建立了电机的仿真模型, 提出了该种电机直接转矩控制方案, 设计了电机扰动情况下的双转子转速跟随技术。仿真结果证明, 直接转矩控制技术可以很好地实现对转永磁同步电机的调速, 并解决双转子的转速跟随问题, 而且系统结构简单、转矩响应迅速、鲁棒性强, 有广阔的应用前景。
[1] 潘光, 肖志勇, 黄明明. 对转螺旋桨设计参数优化[J]. 鱼雷技术, 2010, 18(1): 5-10. Pan Guang, Xiao Zhi-yong, Huang Ming-ming. Parameters Optimization of Contra-Rotating Propeller Design[J]. Torpe- do Technology, 2010, 18(1): 5-10.
[2] Zhang Feng-ge, Liu Guang-wei. Characteristic Study on a Novel PMSM with Opposite-rotation Dual rotors[C]//IEEE International Conference on Electrical Machines and Sys- tems, Seoul, 2007: 805-809.
[3] Chen Jin-hua, Zhang Feng-ge. Design and Finite Element Analysis on a Novel PMSM with Anti-rotation Dual Rotors [C]//IEEE Proceedings on Automation and Logistics, Shen- yang, China, 2009: 315-318.
[4] Qu Rong-hai, Lipo T A. Dual-rotor, Radial-flux, Toriodally- wound, Permanent-magnet Machine[J]. IEEE Trans on Indu- stry Applications, 2003, 39(6): 1665-1673.
[5] 刘光伟. 异向旋转双转子永磁同步电机基础理论分析与仿真研究[D]. 沈阳: 沈阳工业大学, 2008.
[6] 李晖宙, 吴汉松, 侯楚林. 利用TMS320F240实现鱼雷异步交流电机的直接转矩控制[J]. 鱼雷技术, 2007, 15(3): 44-49. Li Hui-zhou, Wu Han-song, Hou Chu-lin. Implementation of Direct Torque Control of Torpedo Asynchronous AC Motor by TMS320F240[J]. Torpedo Technology, 2007, 15(3): 44- 49.
[7] 张猛, 肖曦, 李永东. 基于区域电压矢量表的永磁同步电机直接转矩预测控制[J]. 清华大学学报(自然科学版), 2008, 48(1): 1-4. Zhang Meng, Xiao Xi, Li Yong-dong. Predictive Direct Torque Control of PM Synchronous Motors Based on an Area Voltage Vector Table[J]. Journal of Tsinghua University (Science and Technology), 2008, 48(1): 1-4.
A Direct Torque Control System of Counter-rotating PMSM for Torpedo Propulsion
XU Hai-zhu, XIE Shun-yi, LIAN Jun-qiang, WANG Ding
(Department of Weaponry Engineering Naval University of Engineering, Wuhan 430033, China)
To improve the torque density and efficiency of a torpedo motor, the configuration and working principle of a counter-rotating permanent magnet synchronous motor(PMSM) are introduced. A simulation model of counter-rotating PMSM is established by deducing its mathematical model, and the design principle of this kind of motor is analyzed. A new direct torque control system for counter-rotating PMSM is designed, and the speed following strategy of two rotors in disturbance condition is proposed to keep the speeds of two rotors equal. Simulation result, which coincides well with the theoretical analysis, verifies that direct torque control is competent for regulating speed of counter-rotating PMSM with high robustness and quick torque response.
torpedo; counter-rotating permanent magnet synchronous motor (PMSM); direct torque control; speed following; disturbance
TJ630.32; TM346
A
1673-1948(2012)01-0051-05
2011-07-14;
2011-07-21.
国防科技预先研究项目资助(101010601202).
徐海珠(1983-), 男, 在读博士, 主要研究方向为水下电力推进与电机控制.
(责任编辑: 陈 曦)
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
传感器与微系统(2022年3期)2022-03-23
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
微电机(2020年7期)2020-08-01